
Guess what guys. Claude code just created this. Run it through openfoam and created with Cadquery
41

20h
Bunun 3 yolu var:
Kod-CAD (CadQuery): Claude kod yazar, sen çalıştırırsın. Bedava, kontrol sende.
Hazır araçlar (Zoo, ForgeCAD, Leo AI): Promptu doğrudan yazarsın. Kolay ama kara kutu.
Canlı köprü (FreeCAD-MCP): AI yazılıma bağlanır, hatasını kendi düzeltir. Geleceğin yönü.
Üçü de aynı duvara çarpıyor: basit parça kolay, gerçek mühendislik hâlâ zor.
1
42

Jun 14
Text-to-CAD is becoming a trend.
Many CAD/AI libraries still rely on OCCT indirectly through build123d or CADQuery.
Most approaches remain CSG-based, good for simple cases.
The real value starts when AI can understand and control topology directly.
We are working on it ;)
24

Jun 13
Free and open source. Works with Claude Code, Cursor, and Windsurf. build123d and CadQuery supported. Full docs and install guide on the listing. everydev.ai/tools/agentcad
53




I'm incredibly excited about our launch of Claude Fable 5 today! To test out the model, I gave it a complex long-running coding task: build a full-blown CAD editor, with CadQuery (a Python CAD framework) as the substrate.
youtube.com/watch?v=tpjJeH1p…
2
13
3,033

Jun 8
Holy shit... MIT just dropped an AI model that converts photos into fully editable CAD programs and it quietly kills the $150/hour CAD modeling industry.
It's called GenCAD.
You give it an image. It gives you the complete parametric command sequence lines, arcs, extrusions ready for manufacturing.
Not meshes. Not point clouds. Actual editable CAD.
- Autoregressive transformers diffusion models for image-to-CAD translation
- Outperforms every existing method on unconditional and conditional CAD generation
- Retrieves matching designs from 7K CAD databases using just a photo
- Trained on 840K images
- Generates multiple valid designs from a single input
The team also built CAD-Coder on top of this -- a vision-language model that writes CadQuery Python code from images with 100% valid syntax rate. Beats GPT-4.5 and Qwen2.5-VL-72B.
Built at MIT. Published in ASME Journal of Mechanical Design.
100% Open Source.

1
12
14
985

Jun 5
からあげさんのお話の中に出てきたcadqueryを使ってみた。へー、いい感じ。これでstl出力して3Dプリンタ屋さんに作って貰えばいいんかな?分からんけど。
色々、やってみようっと。ありがたい!
#名古屋LLMMeetUp

3
124

Jun 4
I would give build123d a try. I think the problem with python freecad is it might be one abstraction removed.
You are using a python script to operate freecad operating on the OCCT kernel. Using build123d or cadquery and you have a script operating directly on the OCCT kernel
3
66

🚀 Excited to announce that BridgeCode will be presented at the CV4AEC Workshop @ CVPR 2026!
This method is a technique for creating a 3D model of a bridge in CADQuery format from a point cloud.
#CVPR2026 #CV4AEC #DigitalTwin

1
9
4,376

Jun 3
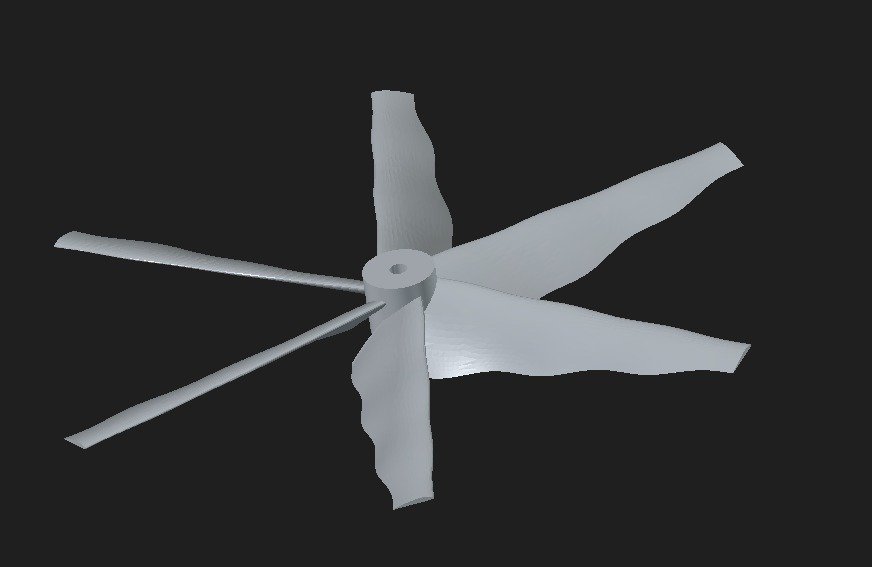
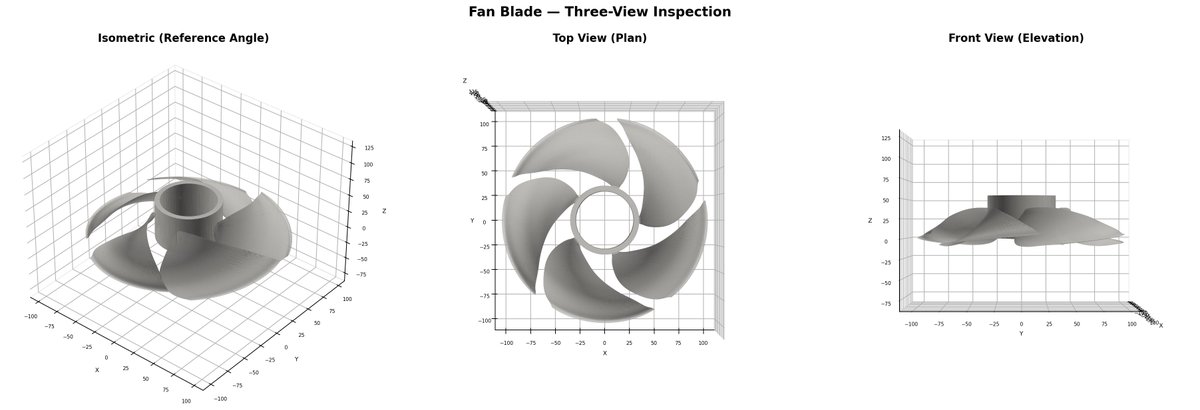
this was claude's attempt in 22 minutes in goal mode with no input from me providing a screenshot of this post.
"howdy! you've been challenged! your goal is to entirely off this prompt build a Python program of your choice that uses build 123d or cadquery which I have installed on this PC to recreate a fan blade that looks like this. assume the outer diameter is 200 mm. make a second program that takes the output file from the first and displays it as a PNG in three view so you can check yourself. stop when you think it matches the original. only hint or feedback i will give you is to start by describing the shape of the fan in detail before writing your plan which will be auto approved as you're in goal mode. timer starts now!"
1
2
210


It seems that developers have finally discovered build123d and CADQuery, that's why numerous CAD related software are emerging.
3
222
May 22
The approach I’m taking to AI augmented CAD is complimentary to the philosophy of CAD design being about the process of geometry creation over button pushing.
My Claude CAD is trained via SKILLS to understand how objects are born. The user communicates to Claude via words, sketches, drawings, pictures, even static STEP or DXF. Claude uses build123d or CadQuery to create the geometry; uses a viewer to inspect.
Infinitely more robust than trying to fine tune an LLM on b-rep training sets.
The problem AI generative CAD has is the nearly infinite variables involved with mechanical design. By nature, everything one desires to build in CAD has never before been seen in the world (unless it’s a Raspberry Pi case). Training an LLM to interpolate through the entirety of mechanical design space means an absolutely mind boggling number of training sets and somehow gaining access to proprietary design data to be of any use.
It means for AI augmentation to work for CAD, you focus on process, not raw b-rep geometry.
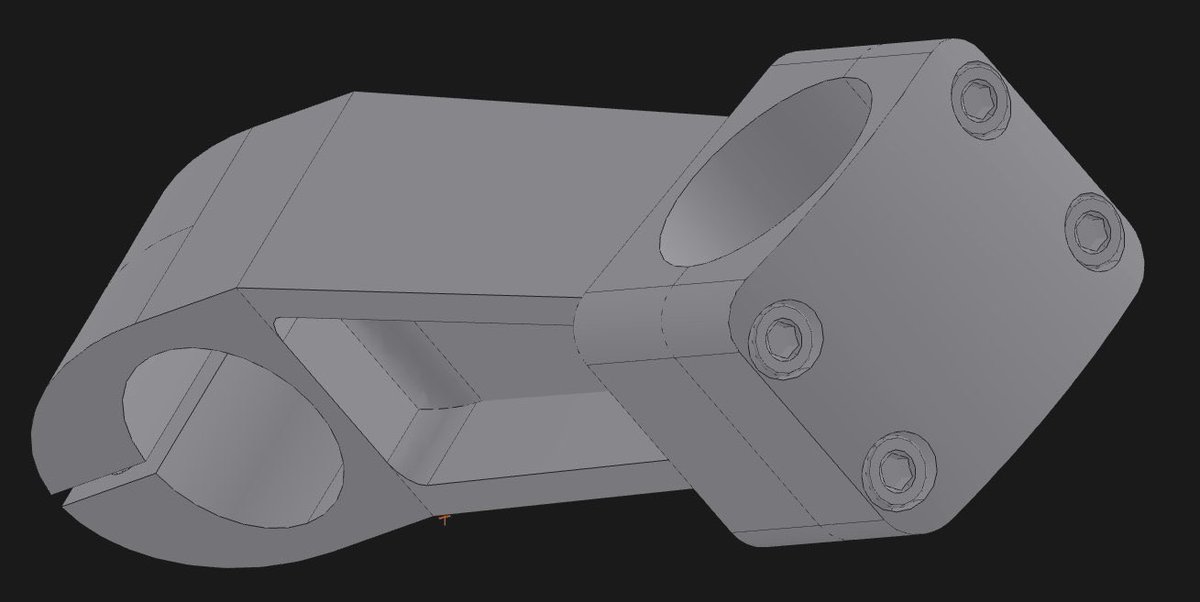
The road bike stem below was built by Claude, engineered by me. This specific part has never been seen before in the history of the world. It falls into well known general categories, but the specifics are new.
Anthropic and OpenAI have already done the hard work of pre-training geometric reasoning skills into their respective products. The trick is aiming this latent skill towards CAD and design engineering.

getting started in CAD is not about learning buttons.
it is about learning how objects are born.
• sketch → define the 2D logic
• constrain → remove ambiguity
• extrude/revolve → turn geometry into volume
• fillet/chamfer → make edges manufacturable
• assemble → understand how parts live together
start by modeling real objects around you.
a bracket. a hinge. a bottle cap. a gearbox.
CAD is not drawing.
it is thinking in geometry, constraints, tolerances, and manufacturing.

1
12
98
8,658

May 20
robotics just got 100x easier.
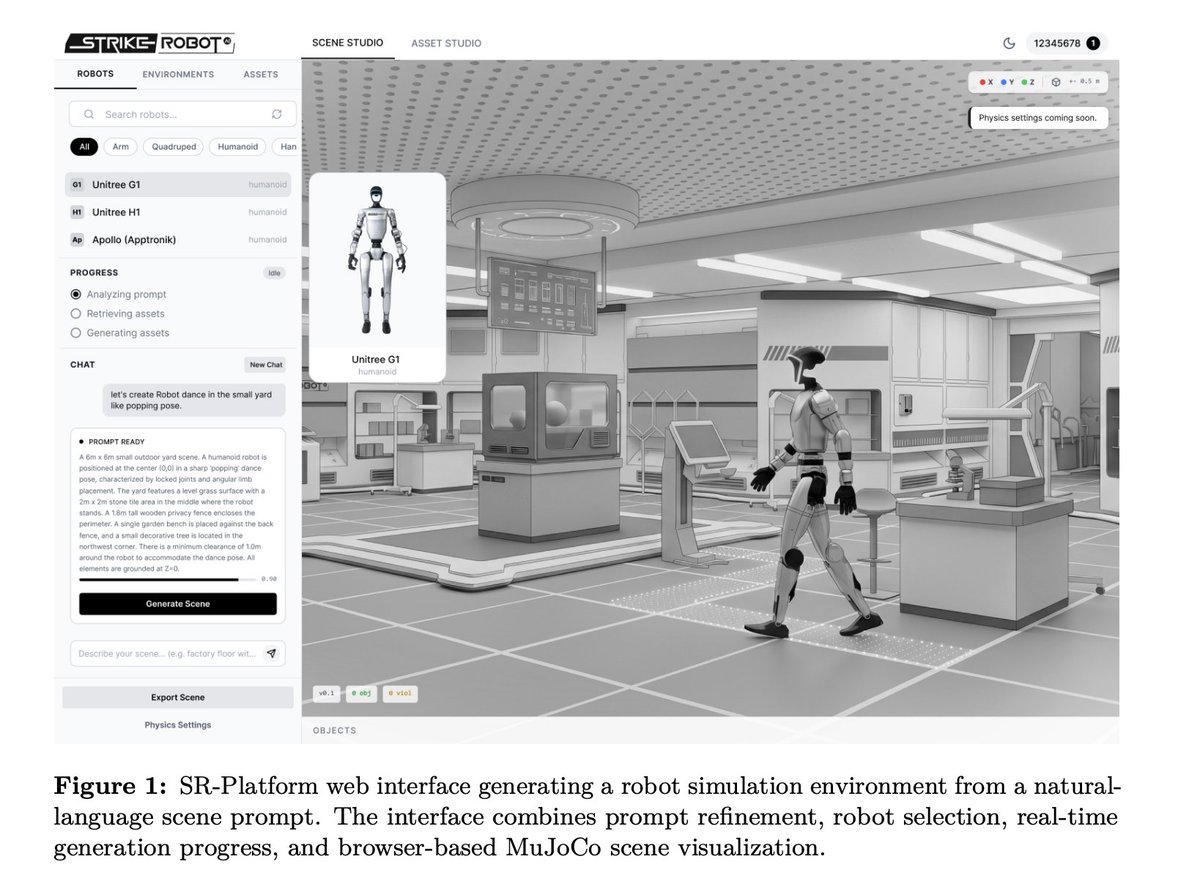
@strikerobot_ai just dropped SR-Platform: type a natural language prompt → instant, fully working MuJoCo simulation environment.
no more days lost to MJCF files, 3D modeling, collision detection, or robot integration.
4-stage agentic pipeline does it all:
- L1 plans the scene in JSON
- L2 grabs/generates STL assets (vector DB CadQuery)
- L3 applies spatial reasoning safety rules
- L4 builds the complete MJCF with robot browser WASM rendering
powered by Venice inference asset caching → median 30-50 seconds.
example: “office desk with chairs and a mug” → live sim in your browser.
this is insane. future of sim is here.
May 17

Building a robot simulation environment from scratch takes days of expert work.
MJCF files. 3D asset modeling. Collision avoidance. Spatial constraints. Robot integration.
We built SR-Platform to turn all of that into a single text prompt.
Here's how the tech works 🧵

15
1
122
400

May 19
很多人现在还把 AI agent 理解成“聊天机器人 自动执行”。
A lot of people still think AI agents are just chatbots with automation.
其实真正难的部分,根本不是 agent。
But the hard part was never the agent itself.
是世界。
It’s the world around it.
你认真看 SR-Platform 这套东西,会发现他们在解决的已经不是单次推理了。
If you really look at SR-Platform, they’re solving something beyond inference.
而是怎么让 AI 批量生成“可运行的现实环境”。
They’re building systems that generate executable worlds at scale.
以前搭一个机器人仿真环境,要懂 MJCF、三维建模、碰撞检测、空间约束、机器人集成。
Building robotics simulations used to require MJCF, 3D modeling, collision handling, spatial logic, and robot integration expertise.
基本是工程团队按天干活。
Usually days of manual engineering work.
现在变成一句话生成。
Now it starts from a single text prompt.
说白了,重点根本不在 LLM。
The interesting part actually isn’t the LLM itself.
而是在后面那套 agentic pipeline。
It’s the agentic pipeline behind it.
第一层先把自然语言拆成结构化场景。
The first layer converts natural language into a structured scene plan.
房间大小、物体类型、机器人型号。
Room size, objects, robot type.
纯规划,不碰几何。
Pure planning, no geometry yet.
第二层开始有意思了。
The second layer is where things get interesting.
系统先去 Qdrant 里查有没有缓存资产。
The system first checks Qdrant for cached assets.
命中直接复用。
Cache hit means instant reuse.
没命中,才调用模型生成 CadQuery 代码,再转 STL。
Cache miss triggers CadQuery generation and STL rendering.
这个设计其实特别 crypto。
The design feels very crypto-native.
因为它不是无限烧推理。
Because it’s not blindly burning inference forever.
而是在做可复用资产层。
It’s building a reusable asset layer.
有点像链上 liquidity routing。
Almost like liquidity routing for environments.
同一个物体以后不需要重复生成。
Once an object exists, you don’t regenerate it again.
真正贵的是“第一次创造”。
The expensive part is the first creation.
第三层其实更像 AI 的 world model。
The third layer starts looking like an AI world model.
桌子必须落地。
Tables need to touch the floor.
机器离墙要有距离。
Machines need clearance from walls.
过道不能堵。
Aisles can’t be blocked.
甚至还有工业安全规则。
There are even industrial safety constraints built in.
很多人没意识到,机器人最大的 bug 很多时候不是动作。
A lot of robotics failures aren’t motion problems.
而是空间关系错了。
They’re spatial reasoning failures.
最后再自动组装成 MuJoCo 场景,直接浏览器运行。
Then everything gets assembled into an executable MuJoCo scene in the browser.
这套东西最让我在意的反而是 Venice 那部分。
The Venice integration is probably the most important part to me.
private inference 本地快速循环 Base 结算审计。
Private inference, fast edge loops, and Base-settled audit trails.
开始有点 AI execution layer 的味道了。
It’s starting to resemble an AI execution layer.
越来越感觉,未来 AI infra 的竞争,不是谁模型参数大。
The future AI infra race probably won’t be about model size.
而是谁能最低成本、最快速度地生成“可交互世界”。
It’ll be about who can generate interactive worlds the fastest and cheapest.
因为 agent 迟早泛滥。
Agents will become commoditized eventually.
但世界不会。
Worlds won’t.
@StrikeRobot_ai

May 17
Building a robot simulation environment from scratch takes days of expert work.
MJCF files. 3D asset modeling. Collision avoidance. Spatial constraints. Robot integration.
We built SR-Platform to turn all of that into a single text prompt.
Here's how the tech works 🧵
3
8
269

May 19
My experience with the SR Platform from @StrikeRobot_ai has honestly been mind-blowing.
Just a single text prompt → and a fully functional 3D robot training environment is generated in around 50 seconds.
SR Platform v2 looks incredibly powerful.
What impressed me most is how they turned a process that normally takes robotics engineers days of simulation work into something as simple as writing one prompt.
The architecture behind it is also very smart, built around a 4-stage agentic pipeline:
• L1 Orchestrator → understands natural language prompts and creates a detailed JSON execution plan
• L2 Asset Forge → searches cached assets or generates new ones using CadQuery code
• L3 Layout Architect → intelligently arranges objects while validating real-world safety constraints
• L4 MJCF Bridge → integrates the robot and exports a browser-ready MuJoCo simulation instantly
Everything runs on Venice inference with a median generation time of only ~50 seconds.
The demo was genuinely impressive, just type something like “robotics lab” or “factory warehouse” and it generates a complete interactive 3D environment ready for robot training directly in the browser.
No complicated setup. No advanced robotics workflow.
I really think this is a huge step toward making Physical AI far more accessible. It lowers the barrier so that more people - not just robotics engineers - can participate in training and building intelligent robots.
#Strike #StrikeRobot #StrikeRobotAI #PhysicalAI
6
5
19
2,299

May 18
Simple breakdown of how SR-Platform works, layer by layer:
SR-Platform uses an assembly line of four specialized steps called an (agentic pipeline)
Each layer has a specific role
1)< Layer 1 / The Orchestrator:
It reads your prompt and translates your words into a structured blueprint (JSON file)
Layer 2 / The Asset Forge:
This is the object builder
It creates the 3D objects like tables, machines, and equipment. Since generating 3D models takes the most time, it uses a smart shortcut:
- It checks a database (Qdrant) to see if the object already exists. If yes, it loads it instantly.
- If the object is new, AI writes CadQuery code to generate a fresh 3D model (STL file) and saves it for future use.
3)< Layer 3/ The Layout Architect:
This is the interior designer
It combines the room blueprint from Layer 1 with the 3D objects from Layer 2 and arranges everything properly.
- Ensures tables stay on the floor and machines are placed correctly.
- Runs safety checks to make sure exits, electrical boxes, and walkways remain clear.
4)< Layer 4 / The MJCF Bridge:
This is the final assembler
It converts everything into MuJoCo XML format for physics simulators, places the robot in its starting position, and streams the interactive 3D simulation directly into your browser.
No heavy software download needed.
Speed breakdown:
Real-world performance over 30 days:
- Average generation time: ~50 seconds
- With cached assets: ~30–40 seconds
Study @StrikeRobot_ai

May 17
Building a robot simulation environment from scratch takes days of expert work.
MJCF files. 3D asset modeling. Collision avoidance. Spatial constraints. Robot integration.
We built SR-Platform to turn all of that into a single text prompt.
Here's how the tech works 🧵
35
1
71
2,195