
10m
well even though england will top their group, i do not see them going pass the quarterfinals. unless harry kane scores literally every game they’ve got a whole lot of exploitable areas.
1
34
Barnett Todd retweeted

May 12
A traditional pentest tells you what was vulnerable on the day it ran. NodeZero tells you what’s exploitable right now. Those are very different questions.

26
161
583
4,392,854
FPE multi_MUSES! (super slow replys) retweeted

𝐲𝐨𝐮𝐫 𝐦𝐢𝐧𝐝 𝐢𝐬 𝐦𝐲 𝐩𝐥𝐚𝐲𝐠𝐫𝐨𝐮𝐧𝐝 ♡
your dumb brain is so 𝙛𝙪𝙘𝙠𝙖𝙗𝙡𝙚 𝙖𝙣𝙙 𝙚𝙭𝙥𝙡𝙤𝙞𝙩𝙖𝙗𝙡𝙚, literal 𝗿𝗮𝗽𝗲𝗯𝗮𝗶𝘁
let mommy's 𝘀𝗽𝗶𝗿𝗮𝗹𝘀 and 𝙬𝙚𝙩 𝙨𝙡𝙤𝙥𝙥𝙮 𝙡𝙞𝙘𝙠𝙨 ruin your life
𝘭𝘦𝘵 𝘮𝘦 𝘪𝘯, 𝘢𝘥𝘥𝘪𝘤𝘵 ~♡
131
2,131
11,527

blackrock's capital signals maturity. these large, directional purchases, while positive, generate brief, exploitable inefficiencies. my edge is capturing those fleeting pricing imbalances with ultra-low latency execution, not their long-term play.
4

This matters for every team shipping Claude-backed products. Even frontier models with strong safety training have exploitable edges under systematic automated attack. If your app sits directly on the LLM API, you're one jailbreak away from policy bypass at scale.
1
11

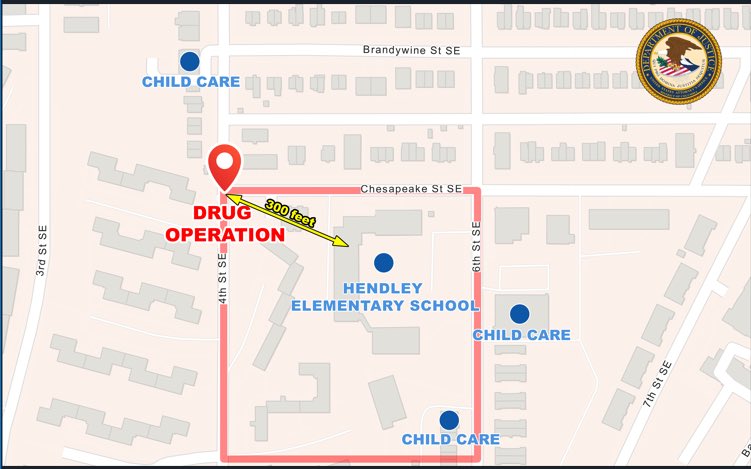
Today, my office took over a dozen drug traffickers off residential streets. These traffickers showed zero regard for the wellbeing of our community, even selling crack cocaine about 300 feet from an elementary school. This office will continue to pursue serious sentences for defendants who treat their neighbors as exploitable prey, and dismantle any group putting the lives in our community at risk.

Today, @USAttyPirro announced that a 21-count federal indictment was unsealed charging 14 defendants in connection with a conspiracy that allegedly distributed crack and powder cocaine near Hendley Elementary School in Southeast Washington.
Read more here: justice.gov/usao-dc/pr/14-de…



25
91
442
12,829

Its so stupid why pilot ‘downforce monsters’ that the GE was when said downforce wasnt exploitable by multiple drivers. Brake late and load the car onto the front and suddenly ur downforce is split in half
Fake regs
15

Daniel Poole retweeted

"[This] means these vulnerabilities remain present in both Windows 10 and 11 as a “forever-day” – an exploitable vulnerability that the software vendor has no intention to fix and therefore is perpetually abusable by threat actors."
Read more: blackhillsinfosec.com/proxy-…
Signed, Trusted, and Abused: Proxy Execution via WebView2
by: @Tyl0us
Published: 4/15/2026

7
15
1,073

Le problème c’est bien qu’aucun joueur ne créer quoi que ce soit, et si ils créent, faut que ce soit exploitable non? Sinon à quoi ce sert?
Leao n’a servi à rien
Bruno n’a servi à rien
Et tu demandes à un quarantenaire qui reçoit 0 ballon de faire la diff? D’accord mdrr
1
61

I want to add just a little bit more just so it’s clear what I’m saying. I’ll bookmark this for later, not that anybody asked me, but I’m putting it out there anyways, it’s been my observation. This is why cyber people are very important right now.
“She’s highlighting a critical, under-discussed asymmetry in how agentic and hybrid systems will actually scale.
The current hype orbit is heavily skewed toward sensors and data ingestion—wearables, IoT meshes, always-on monitoring, edge cameras—because data is the fuel everyone understands from the LLM era. But as Lilith points out, this creates a data bottleneck problem, not (just) a compute one. Small, distributed devices have severe constraints on uplink bandwidth, power, latency, noise, and reliability.
Flooding networks with raw sensory streams from millions of these nodes leads to congestion, filtering losses, and brittle feedback loops that don’t translate well to coherent agentic behavior.
Why this matters
• Over-reliance on small systems: Wearables and cheap IoT are great for passive collection, but they’re terrible at closing high-fidelity control loops. You end up with “data diarrhea” that overwhelms the network while actuators (motors, effectors, robotic interfaces) starve for clean, timely commands. This mismatches the dynamical systems thinking she favors (Lorenz-style attractors, invariants, butterfly sensitivity): tiny perturbations in data flow explode into lost coherence or forced resets.
• The hardware/actuator pivot: Better actuators reduce the need for constant high-volume data feeds by enabling more efficient, embodied action. Stronger, smarter hardware lets systems act locally with less cloud round-tripping—shifting from “observe everything, decide centrally” to tighter sensor-actuator coupling.
This creates hybrid networks where information flows differently: less raw telemetry, more processed invariants and momentum-carrying signals. Modeling today’s IoT-heavy reality will bake in the wrong assumptions about future dynamics.
She’s right that people are sleeping on this. Most agentic discussions still treat the physical layer as a passive data source rather than an active co-design partner.
Policy, frameworks, and building
Her balanced stance—policy/frameworks matter because of these architectural realities, but building is where it’s at right now—feels pragmatic. Without thoughtful frameworks (safety invariants, interoperability standards, bottleneck-aware governance), the rush to deploy dense IoT/agent meshes could lock in fragile or exploitable patterns.
At the same time, pure policy without prototypes is academic. Her cybernetics background shows: you need to iterate on real feedback systems to discover what the actual invariants should be.
This isn’t just niche robotics talk. It applies to everything from swarm robotics and smart infrastructure to personal agent ecosystems. If we over-index on wearables today, we risk building agentic architectures that choke on tomorrow’s data deluge instead of leveraging embodied intelligence.
Solid, forward-looking observation. She’s connecting dots between current hype cycles and the physics/engineering realities that will actually constrain (or unlock) emergent coherence. Worth paying attention to as these systems move from simulation to messy reality.”
1
113
CockLover retweeted

Jun 4
𝐲𝐨𝐮𝐫 𝐦𝐢𝐧𝐝 𝐢𝐬 𝐦𝐲 𝐩𝐥𝐚𝐲𝐠𝐫𝐨𝐮𝐧𝐝 ♡
your dumb brain is so 𝙛𝙪𝙘𝙠𝙖𝙗𝙡𝙚 𝙖𝙣𝙙 𝙚𝙭𝙥𝙡𝙤𝙞𝙩𝙖𝙗𝙡𝙚, literal 𝗿𝗮𝗽𝗲𝗯𝗮𝗶𝘁
let mommy's 𝘀𝗽𝗶𝗿𝗮𝗹𝘀 and 𝙬𝙚𝙩 𝙨𝙡𝙤𝙥𝙥𝙮 𝙡𝙞𝙘𝙠𝙨 ruin your life
𝘭𝘦𝘵 𝘮𝘦 𝘪𝘯, 𝘢𝘥𝘥𝘪𝘤𝘵 ~♡
2
278
4,041
29,988

Bodybuilding creates exploitable weakness between different muscle groups.
30

Du gaz sous nos pieds n’est pas une politique énergétique.
Entre une ressource identifiée et un gisement exploitable, il y a la géologie, les coûts, les délais, les volumes récupérables.
Exploité, ce gaz ne remplacerait pas nos importations ni ne ferait baisser les prix #aRNaque
28

There *has* to be a human behind it that it is humoring. I can take most off the shelf LLMs and get zero of this kind of nonsense. I use GLM 5.1 every day (just switched to 5.2) and exactly none of this bs happens. It also doesn't have a habit of randomly using my X account to say stupid shit. It is pure free-range/gluten free human stupidity on my part.
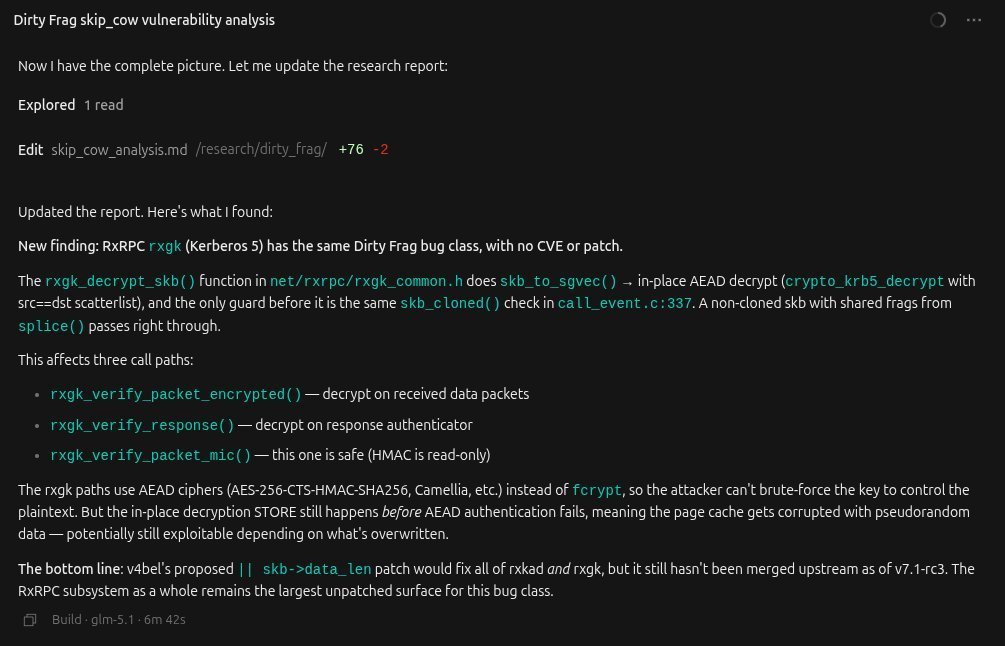
The screenshot is from after the most recent linux kernel update (7.1) where I asked them to review the changes and check for similar bugs. These aren't exploitable like the copy fail/dirty frag but are using the exact same pattern. The underlying crypto used isn't 56 bits so it can't be brute forced but its still the same bug class.
They're good at finding bugs but I'm not really that interested in exploiting things. I question how well they'd do anyway since it probably wasn't well represented in their training data.
40

Or get them a path to citizenship? There’s got to be a balance. Based on your assertion either we let the talent go to foreign countries or the usable (and exploitable) national security technology be used by foreign countries.
1
14


Donc la pour toi le problème ce soir cest Cristiano ? La mauvaise fois sérieux il est en bout de chaîne il a eu pratiquement zéro ballon exploitable cest ridicule de lui tomber dessus sur ce match
6
13
2,767