
Joined April 2021
- Tweets 2,141
- Following 507
- Followers 5,207
- Likes 3,911
164 Photos and videos













Pinned Tweet

1 Jul 2025
Meet our 2025 #ClimateFellows!
Over the next month, we’ll spotlight each fellow & the vital work they’re doing in the fight against climate change. Keep an eye out & follow along to see how they’re shaping a greener, more sustainable future.

4
6
48
21,812
776 Foundation retweeted

Computers we’ve donated over the years.
1
1
50

I am beyond thrilled to share the news that the @wef named @RunLaminar a 2026 Technology Pioneer! Big challenges mean big opportunities. #TechPioneers26 #DeepTech #Innovation #InnovateScaleImpact

1
3
109
776 Foundation retweeted

May 14
As a result, we’re opening applications for the next fellowship cohort in August. Gives us more time to level this thing up for the builders who are out there shipping what’s next. Really excited to see what you’ve been working on & to welcome the next cohort later this year!
2
2
17
3,001
May 13
A happy update from us: our Director has welcomed her first child!
With this news, we’ll open applications for the next cohort in August.
We look forward to learning what you all have been working on.
2
14
7,209
776 Foundation retweeted

At the @776foundation we didn’t back climate founders bc it was trendy, we backed them bc it was inevitable.
Now, as energy security reshapes global priorities, that conviction is compounding & we’ll continue to back the next gen building what comes next.
ft.com/content/9921f2b5-c910…
1
1
182
776 Foundation retweeted
Apr 25
43 🙏 thank you for all the birthday wishes. Never been more energized and optimistic about our future because I have no choice - we must get to that outcome, the better tomorrow
68
10
839
15,532
776 Foundation retweeted
Apr 24
Farming has a global labor crisis and @776foundation climate fellow @oxncgen is building the fix — autonomous robots that plant, spray, weed, and monitor crops. Real hardware, real fields.
@3farmatebots is building from Ghana for the world!
23
267
810
107,835


776 Foundation retweeted

Apr 14
We sat down with @JoyNewsOnTV to talk about the future of farming and why the transition from traditional methods to autonomous technology is not a question of if, but when.
Labour availability is one of the hardest problems in farming, and it is only getting harder. Getting the right people on the field when you need them is a challenge that has constrained farmers for decades. That was the problem we set out to solve from day one, and it is the problem FAMA addresses.
The conversation around agriculture is changing. The tools have to change with it.
Watch the full interview below.
2
9
9
488

Building a self-driving system for a farm is a completely different problem from building one for a road. Here is what that actually means.
Our robot, FAMA, is built on a rugged chassis engineered specifically for the demands of working farmland. Uneven terrain, loose soil, and unpredictable surface conditions are not edge cases for FAMA. They are the operating environment it was designed around from the ground up.
The platform is fully electric and runs a battery-swapping architecture. This is a deliberate choice over plug-in charging. When you are planting corn or soybeans inside a closing weather window, downtime is not an option. Battery swapping keeps turnaround times short and keeps the platform working when it needs to.
FAMA also runs a 4-wheel drive, 4-wheel independent steering system. This combination gives it a range of motion that goes well beyond what conventional steering architectures allow, including point turns and crab steering. The practical result is a robot that can cover a field with maximum efficiency without needing additional clearance for repositioning.
The self-driving stack is where things get genuinely interesting.
Our stack is vision-driven, and the approach mirrors how a human tractor operator actually works. When an operator gets into a tractor, they read the field visually, track the farm boundaries, and execute row after row based on what they see in front of them. That is the model FAMA follows, except it does this entirely autonomously using a real-time vision model that processes the field environment continuously as it moves.
We run a 4-depth camera system that provides complete field of view coverage with built-in redundancy. At any point during operation, the system always has unobstructed visual ground truth available, which the vision model uses to maintain accurate field boundary detection and precise positional awareness throughout the entire run.
The self-driving stack operates across multiple layers handling perception, state estimation, motion planning, and low-level control. Together these layers give us precise driving, robust error correction, and reliable execution across varying field conditions. The stack requires no pre-loaded maps and no GPS signal. Everything runs in real time, making it deployable in any agricultural environment without site-specific setup.
Robots growing food are here to stay, and there’s no going back. The era of human-centric crop production is over. The robots are here, and we at @3farmatebots are leading the charge.
We have a lot more technical content around FAMA coming soon. Stay tuned :)

6
12
71
4,161
776 Foundation retweeted

Apr 9
Looking forward to speaking at BIOPHILIA — Biodesign, Biomaterials, Biomimicry at #LAClimateWeek on April 16th at @Rivian in Venice!
Register here: eventbrite.com/e/biophilia-t…
2
5
241

2
156
776 Foundation retweeted
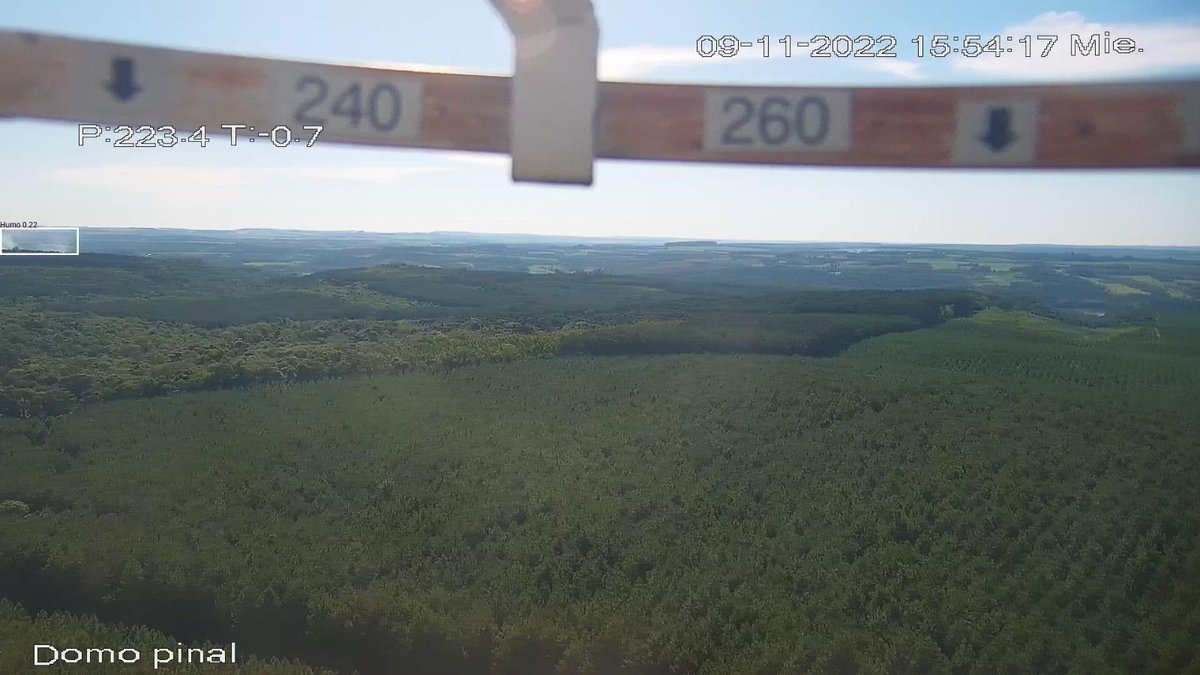
Today our platform detects wildfires 35 minutes before NASA's system. In 2025 we helped respond to 600 fires across 21 countries on 4 continents. Our clients: forestry companies, insurers, energy firms, and governments.
1
2
27
6,356
Congrats to #climatefellow @ViauFranco 👏
I'm 22 and just closed a $2.7M seed round. Our AI detects wildfires before NASA. Here's the story 🧵

1
5
410
776 Foundation retweeted
A quick glimpse into 24 hours running Computers 4 People
3
5
276
Mar 19
Congrats to climate fellow @oxncgen on the upcoming launch of @3farmatebots FAMA, Ghana's 1st autonomous farming robot.
Mar 18

HELLO GHANA 🇬🇭
You’re invited to the launch & live field demonstration of FAMA — Ghana’s first autonomous farming robot, powered by solar energy & AI (built in Ghana by my team @3farmatebots.
We specially invite you to be part of this history-making moment on April 4, 2026.
9
29
1,922
776 Foundation retweeted
Mar 18
Farmers are producing more food with fewer hands every year. That is not sustainable.
So we built FAMA. An autonomous robot that plants, weeds, and fertilises using AI vision. No GPS needed.
Built in Ghana. Launching soon.
#AgTech

7
9
761
we’re scaling the most reliable GPS-agnostic self-driving stack for agriculture.
feeding a growing world requires a fundamentally different approach to farming. and robots are the answer


we spent the last few years building an autonomous robot for large-scale agriculture in Africa.
next week, we finally show it to the world.
23. 03. 2026
everything changes. never been more bullish on robots like now 🚀
you can just build things
7
11
799