
Galbot is a world-leading embodied AI company building general-purpose robots for every industry and home.
Joined January 2024
- Tweets 94
- Following 41
- Followers 1,861
- Likes 330
60 Photos and videos












Galbot retweeted

Jun 11
In a pilot convenience store operated by FamilyMart, a service robot developed by Galbot has been deployed to handle basic customer service tasks in a staffless setting. china.org.cn/2026-06/11/cont…
1
7
5
1,371

Jun 2
Galbot is bringing embodied AI from research to real-world deployment.
At #ICRA2026, we’ll showcase two live demos powered by AstraBrain, our end-to-end embodied AI model for whole-body and dexterous manipulation.
Visit us at Booth #137 to see autonomous robots in action! 🤖
galbot.com
#EmbodiedAI #HumanoidRobots #Robotics #ICRA2026 #Galbot #Robots
1
10
715
May 16
May 14

Special Report w/ @BretBaier from @FoxNews
Humanoid robots in real life aren’t a friction—they’re happening right now! 🚀
Galbot G1 robots have stepped out of the lab, working reliably and autonomously in retail stores and pharmacy warehouses 24/7 for over a year.
This is what the future looks like.
#Galbot #Robot #HumanoidRobot #AI #Technology



1
13
4,954
Galbot retweeted

May 13
🇺🇸🇨🇳 Bret Baier coffeemaxxing in China.
Would you try a robot coffee?
May 7

🇺🇸🇮🇷 Fox's Bret Baier on an Iran deal:
"I talked to the President on the phone today. He did sound cautiously optimistic and said it could happen within a week."
One week, the sequel, again, part seven.
30
36
175
254,690
Galbot retweeted

May 14
Fox News’ anchor Bret Baier is in China and just tested a humanoid robot working at a convenience store.
He saw for himself how China is leading and dominating the AI race.
Robots and AI have become China’s new pandas: a must-see and try for visitors from abroad!
30
197
882
81,550
May 14
Special Report w/ @BretBaier from @FoxNews
Humanoid robots in real life aren’t a friction—they’re happening right now! 🚀
Galbot G1 robots have stepped out of the lab, working reliably and autonomously in retail stores and pharmacy warehouses 24/7 for over a year.
This is what the future looks like.
#Galbot #Robot #HumanoidRobot #AI #Technology
2
17
6,191
May 14
Nothing can beat a cup of coffee in the morning☕️especially when it's made by Galbot Coffee Barista 🤖
#Galbot #Robot #HumanoidRobot #AI #CoffeeBarista

3
693
Apr 29
LDA has been accepted by RSS 2026!See you in Sydney!
Apr 23
Introducing LDA, a latent world action foundation model that, for the first time, unifies the utilization of heterogeneous embodied data across simulation and reality, humans and robots, and varying levels of action quality and annotation.
By breaking long-standing data silos in embodied intelligence, LDA enables the field, much like GPT did for language, to benefit continuously from scaling data, marking the transition into a new era of scalable learning.
#Galbot #Robotics #Innovation #AI #Technology #Humanoid #WorldModel
1
4
940
Apr 24
arXiv: arxiv.org/abs/2602.12215
Code: github.com/jiangranlv/LDA-1B
Apr 23
Introducing LDA, a latent world action foundation model that, for the first time, unifies the utilization of heterogeneous embodied data across simulation and reality, humans and robots, and varying levels of action quality and annotation.
By breaking long-standing data silos in embodied intelligence, LDA enables the field, much like GPT did for language, to benefit continuously from scaling data, marking the transition into a new era of scalable learning.
#Galbot #Robotics #Innovation #AI #Technology #Humanoid #WorldModel
1
14
60
9,909
Apr 23
Introducing LDA, a latent world action foundation model that, for the first time, unifies the utilization of heterogeneous embodied data across simulation and reality, humans and robots, and varying levels of action quality and annotation.
By breaking long-standing data silos in embodied intelligence, LDA enables the field, much like GPT did for language, to benefit continuously from scaling data, marking the transition into a new era of scalable learning.
#Galbot #Robotics #Innovation #AI #Technology #Humanoid #WorldModel
5
39
245
37,762
Apr 7
We’re heading to Hannover Messe 2026 🇩🇪
📍 Booth G76
📅 Apr 20–24, 2026
Join us in Hannover for a live demo of Galbot S1, the world’s first fully autonomous heavy-duty humanoid robot—built for real industrial work.
#HannoverMesse #HannoverMesse2026 #Galbot #GalbotS1 #HumanoidRobot #EmbodiedAI #IndustrialAutomation
2
5
15
2,172
Galbot retweeted

Mar 15
Researchers trained a humanoid robot to play tennis using only 5 hours of motion capture data
The robot can now sustain multi-shot rallies with human players, hitting balls traveling >15 m/s with a ~90% success rate
AlphaGo for every sport is coming
475
1,151
8,813
1,891,943
Galbot retweeted

Galbot Robotics has released a video showing a humanoid robot rallying tennis shots with a human player. bit.ly/418sUTs

5
5
15
3,058
Galbot retweeted

Mar 17
A video of a China-developed humanoid robot playing tennis was posted on X on Sunday and was reposted and liked by Elon Musk on Monday with a brief comment “yeah,” drawing a total of 8.6K likes and sparking widespread attention and discussion. Developed by Galbot, the humanoid tennis robot can rapidly adjust its footwork and positioning, coordinate upper- and lower-body movements to execute swings, and return shots with precision to designated targets.
3
10
58
5,431
Mar 16
🎾Your humanoid tennis player is here!🤖
Introducing LATENT (Learning Athletic Humanoid Tennis Skills from Imperfect Human Motion Data) — the world’s first real-time whole-body planning and control algorithm for athletic humanoid tennis.
For the first time, a humanoid robot can sustain high-dynamic, long-horizon tennis rallies with millisecond-level reactions, precise ball striking, and natural whole-body motion.
This marks a leap from mechanical motion imitation to intelligent, decision-driven athletic interaction.
#Galbot #Robotics #Innovation #AI #Technology #Humanoid
29
88
232
45,525
Galbot retweeted

Mar 15
🎾Introducing LATENT: Learning Athletic Humanoid Tennis Skills from Imperfect Human Motion Data
Dynamic movements, agile whole-body coordination, and rapid reactions. A step toward athletic humanoid sports skills.
Project: zzk273.github.io/LATENT/
Code: github.com/GalaxyGeneralRobo…
159
629
4,045
1,375,596
Feb 19
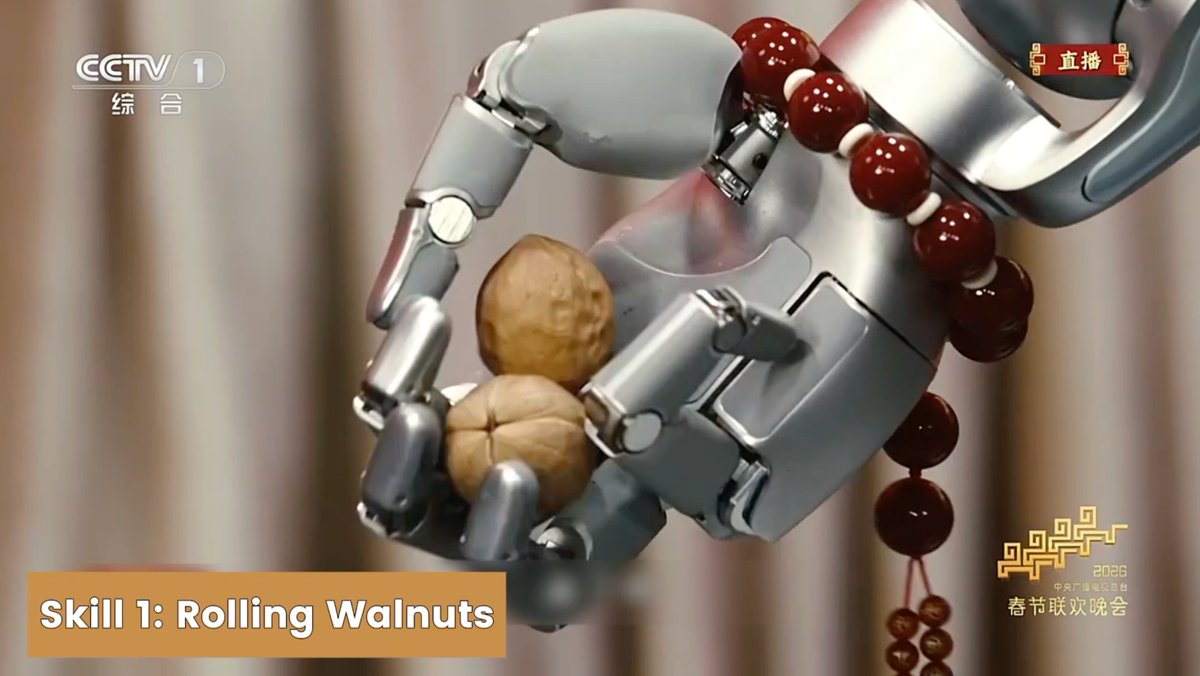
🎉Galbot G1 showcased a real-time autonomous performance on this year’s live Spring Festival Gala!
✅Rolling walnuts in-hand
✅Picking up glass pieces
✅Retrieving a bottle from tightly packed shelves
✅Folding a T-shirt
✅Cooking and skewering sausages.
Watch to see how it perceives, decides, and acts in real time🚀
#Galbot #Robotics #Humanoid #AI #Technology #Gala
4
2
20
8,930
Feb 19
Galbot trains AstraBrain through a combined approach: a small amount of human demonstration to capture task intent, massive high-fidelity simulation and synthetic data (including hard cases like transparent objects and deformable cloth) to broaden coverage, reinforcement learning to sharpen precision and collision-free behavior via trial-and-error, and lightweight real-world fine-tuning to close the sim-to-real gap. The result is a system that emphasizes generalization—one autonomy stack handling diverse tasks (in-hand dexterity, transparent-object pickup, packed-shelf retrieval, cloth folding, and bimanual tool use) by adapting to the live environment rather than “memorizing” a single scripted sequence.


1
2
815