
Director, PLAN Lab @iSchoolUI · NeurIPS'26 & ICML'26 Organizing Committee · GenAI, VLMs, Embodied AI, robots 🤖 | PhD @illinoisCDS 🇬🇷 plan-lab.github.io
Joined September 2013
- Tweets 332
- Following 137
- Followers 401
- Likes 445
68 Photos and videos







Pinned Tweet

Jun 9
@CVPR wrapped up, and I left incredibly grateful 😊
It was such a energizing week! Great papers, great conversations, and so many thoughtful interactions with senior colleagues who were generous with their advice and support. I was also inspired by the many students who came by, asked great questions, and were eager to connect.
Feeling thankful for the #CVPR2026 community, proud of our students, and excited for what's next for PLAN Lab! 🔥
More news about our next stops coming soon 🚀
4
272
Jun 11
When your students leave for amazing summer internships and you’re just so proud!✨
... but also already counting down until they're back in the lab 😆
4
97
Jun 10
🤩 DecartAI is on fire! Looking forward to seeing this direction mature in robotics.
Real-time world models could let embodied agents act, fail, adapt, and learn in closed loop. The big question is whether these worlds can become sufficiently physically faithful and capture richer sensory modalities for long-horizon, contact-rich robotic tasks.

Every robot should live a million lives before it meets you. Until today, that was impossible: hundreds of expert hours per simulated environment, video-game-like graphics.
We just replaced all of it with a single prompt.
Meet Oasis 3 - the world's first API-accessible world model, starting with autonomous vehicles.
3
165
Jun 10
Gave Claude Fable 5 my lab website and this is the video created in one prompt! Even the progress bar is uiuc orange 🫥
1
8
12,822
Ismini Lourentzou retweeted

Jun 4
Touch alone isn’t enough. 🖐️
For robotics, tactile intelligence truly levels up when touch gains spatial meaning.
At #ICRA2026, we dove into the core concept behind SaTA: Spatially-anchored Tactile Awareness for robust, dexterous manipulation. Read it here: arxiv.org/html/2510.14647v1.
The challenge is fundamental: a robot shouldn’t just register a touch, it needs to understand exactly where that contact occurs relative to its fingers, joints, and overall hand structure.
This is the missing link that turns raw data into precise, real-time adjustments during manipulation.
Why does this matter? Because the most complex part of any manipulation task happens when vision is at its least reliable, that final millimeter before insertion, sliding, gripping, or fine-tuning.
At Sharpa, this is exactly why we’re building tactile hands and tactile AI in tandem. 🚀
#Sharpa #Robotics #EmbodiedAI #TactileIntelligence #ICRA2026 #DexterousManipulation
📷
6
32
199
14,724
Jun 7
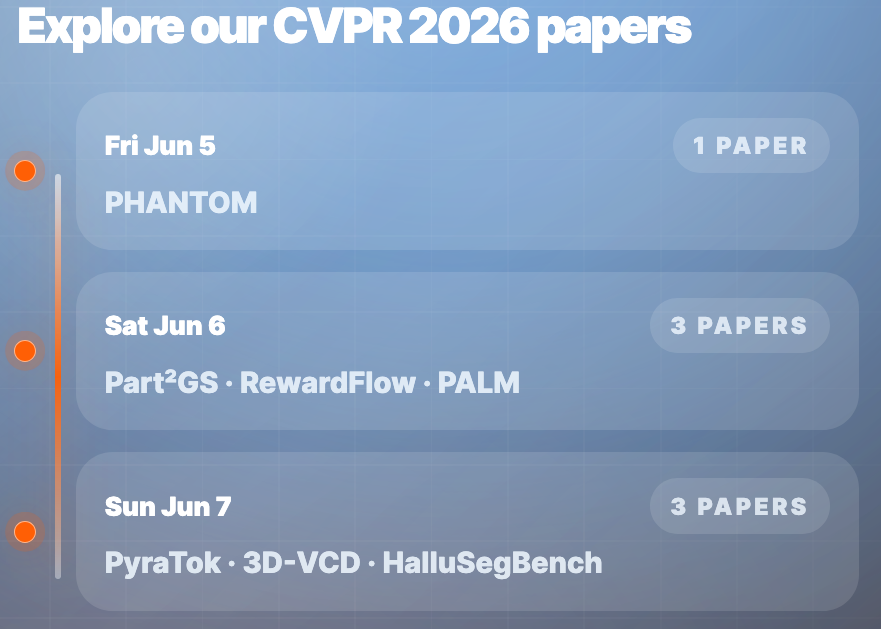
PLAN Lab is back at #CVPR2026 on Sunday with 3 posters!
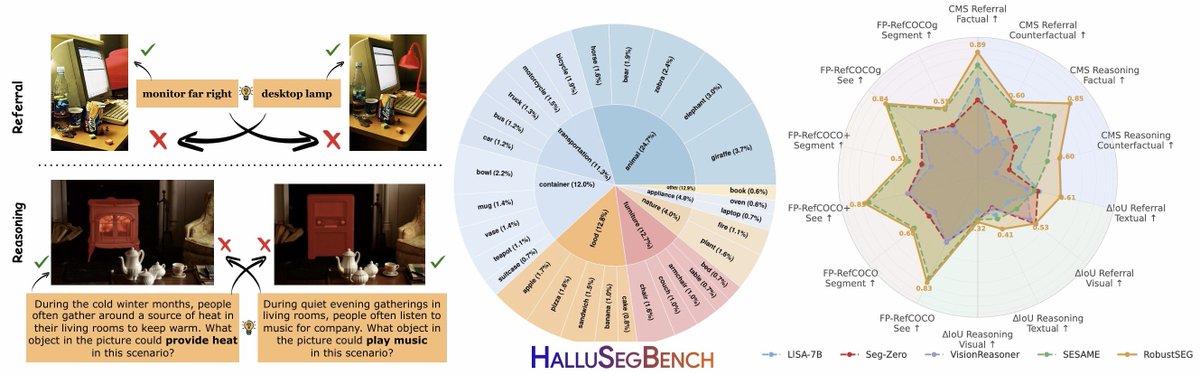
Stop by for work on reliable grounding, language-aligned video representations, and hallucination mitigation for embodied 3D agents.
#CVPR #CVPR2026 #ComputerVision #EmbodiedAI #GenerativeAI
🧵👇
1
2
265
Jun 7
📌 3D-VCD — Poster #373
🕞 3:30–5:30 PM
📍 ExHall A
Work led by Makanjuola Ogunleye and @Eman__Hussein
plan-lab.github.io/projects/…
Training-free hallucination mitigation for 3D-LLM embodied agents.
1
1
2
133
Jun 7
🇰🇷 Next stop is ICML'26 with
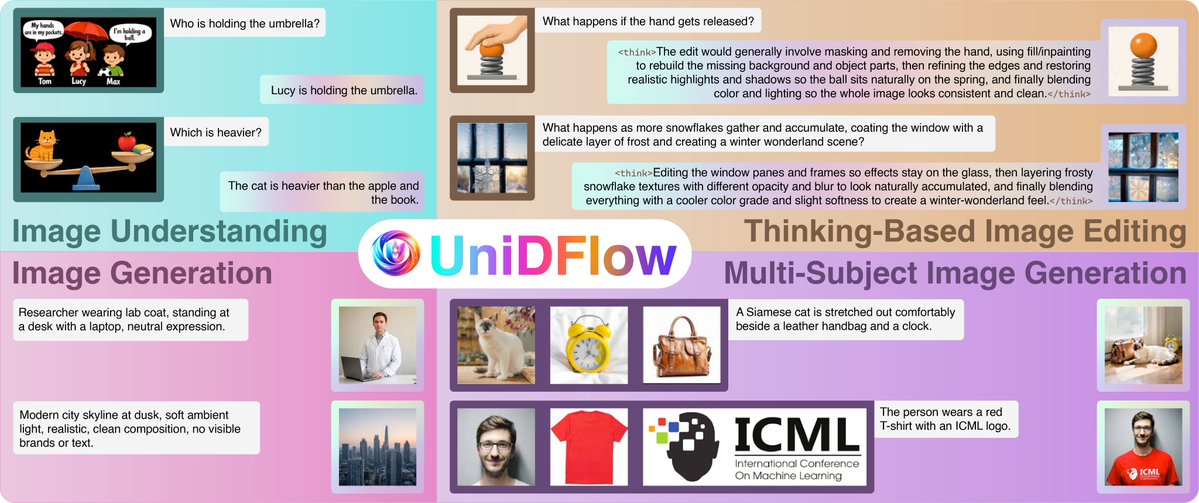
1. UniDflow, our unified discrete flow matching model for reasoning-based image editing and generation.
Work led by @onkar_s_13
plan-lab.github.io/projects/…
2. LaTtE-Flow, our layerwise timestep-expert flow-based Transformer model for efficient image understanding and generation.
Work led by @YingShen_ys
arxiv.org/pdf/2506.06952
1
98
Ismini Lourentzou retweeted

Jun 6
This is why we need VTAM: our work combines WAM with tactile sensing and transfers pretrained visual world modeling to visuo-tactile world modeling. The demo below shows a robot arm using tactile WM to pick up a delicate chip.
plan-lab.github.io/projects/…

I want to offer some unsolicited advice to computer vision researchers jumping into robotics. Don't focus too much on VLMs, VLAs etc. That's fine, but the real action is at the sensorimotor level. Most of the open problems in robotics are in manipulation, which is about hand-object interaction, and contacts and forces are central. Proprioception and tactile sensing are as important as vision. Don't get seduced by cherry-picked demos. You can't do robotics without doing robotics.
1
1
1
187
Jun 6
Computer vision has made huge progress in recognizing the world. But we cannot "see" our way out of every manipulation problem.
Contact-rich phenomena, force, slip, shear, deformation, are often weakly observable or hidden from cameras.
VTAM addresses this through video-tactile-action modeling, predicting future visual tactile streams and acting from physical interaction dynamics.
plan-lab.github.io/projects/…
I want to offer some unsolicited advice to computer vision researchers jumping into robotics. Don't focus too much on VLMs, VLAs etc. That's fine, but the real action is at the sensorimotor level. Most of the open problems in robotics are in manipulation, which is about hand-object interaction, and contacts and forces are central. Proprioception and tactile sensing are as important as vision. Don't get seduced by cherry-picked demos. You can't do robotics without doing robotics.
1
3
13,864

Jun 6
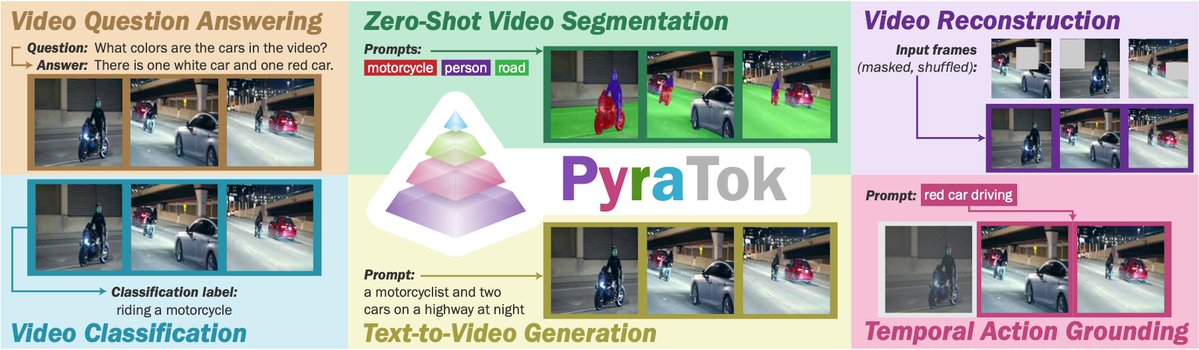
You can also find our Pyratok work, led by @onkar_s_13 at the @Sony Exhibition Booth today at 15:45.
sony.com/en/SonyInfo/technol…
1
90
Jun 6
👏👏🏽👏🏿Proud of the students leading these works. Please stop by, ask questions, and say hi!
We will have 3 more posters tomorrow, stay tuned 😊
plan-lab.github.io/cvpr2026.…
#CVPR #CVPR2026 #ComputerVision #GenerativeAI #Robotics #EmbodiedAI #PLANLab
183