
Joined October 2025
- Tweets 342
- Following 218
- Followers 51
- Likes 1,151
27 Photos and videos




Zet (✱,✱) retweeted

Jun 9
GAxis (✱,✱)☀️
New week. New challenges. New access.
We’re giving away 10 BitRobot access codes over the next 72 hours.
Winners will get access to SN/04 and start earning rewards from both Axis and BitRobot.
To join:
1. Follow @axisrobotics & @BitRobotNetwork
2. Like repost this post
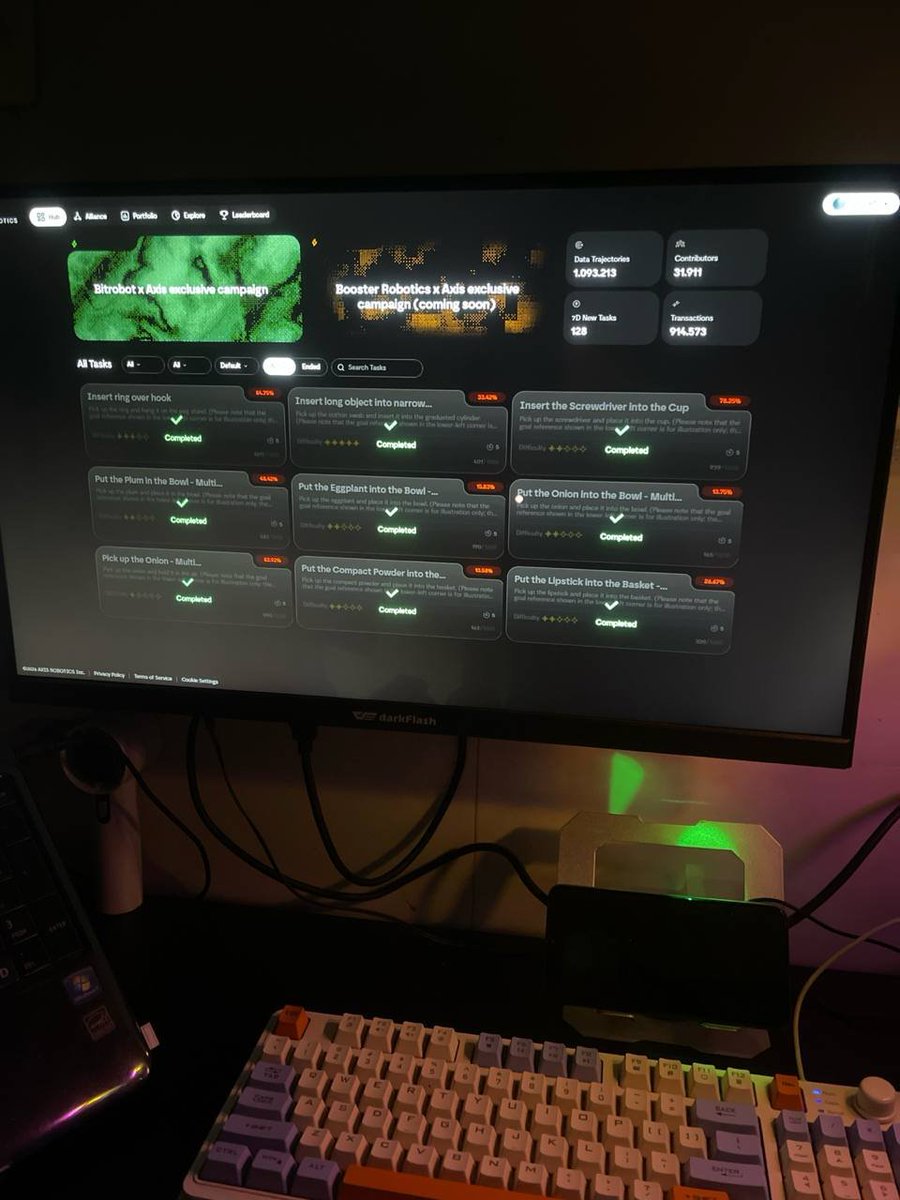
3. Comment with a screenshot or photo of where you’re training right now
Grinding tasks? Climbing the leaderboard?
Show us your journey.

Jun 4

Announcing our collaboration with @BitRobotNetwork!
Axis is launching SN/04 on BitRobot, the open robotics lab on Solana that coordinates distributed contributors to accelerate Physical AI research.
SN/04 is a teleop-in-sim mission where contributors complete web-based robotics simulation tasks, generate valuable training data, and earn rewards from both ecosystems.
Together, we’re scaling human demonstrations for Physical AI — powered by everyone.
Rules and details below ↓
192
142
323
13,794

🎁 GIVEAWAY 3 AXIS ACCESS CODES
Mình có 3 code đặc biệt cho campaign Axis x BitRobot.
Có code này, aem sẽ unlock được Private Training Pool trên Axis Hub.
Điểm ngon nhất: 1 code → 1 private pool → unlock reward exposure từ 3 bên: Axis x BitRobot x Base
Cách tham gia:
Follow @axisrobotics & @mintt_34
Like Repost bài này
Comment: “Train robot with Axis” tag 1 người bạn
3 winner sẽ nhận code qua DM.
Get code. Train robot. Unlock 3 reward layers 🤖

70
48
94
1,483

Jun 7
Diversity beats volume: 1M trajectories from many different users means extremely rich variety in control styles, environments, edge cases, failures, and recovery behaviors. The model learns true robustness and generalization — far beyond what a small team of engineers can generate in a lab.
Foundation model stepping stone: High-quality trajectory data is the “language” robots need. At this scale, Axis is getting closer to training policies capable of zero-shot or few-shot performance on new, complex, and multi-stage tasks.
Powerful network effect: More contributors → richer data → stronger models → higher platform value → even more contributors. This flywheel is what Physical AI has been missing.
Industry gap: While many robotics teams are still struggling with just a few thousand trajectories collected on expensive hardware, Axis is playing in a completely different league thanks to its decentralized approach.
Going from 1M to 10M will be the next massive leap. The gap between Axis and traditional data-collection teams will only widen.
Extremely proud to be part of this journey @axisrobotics
We’re not just collecting data — we’re collectively teaching robots how to think and act in the real world.
#ai #robotics
Jun 7
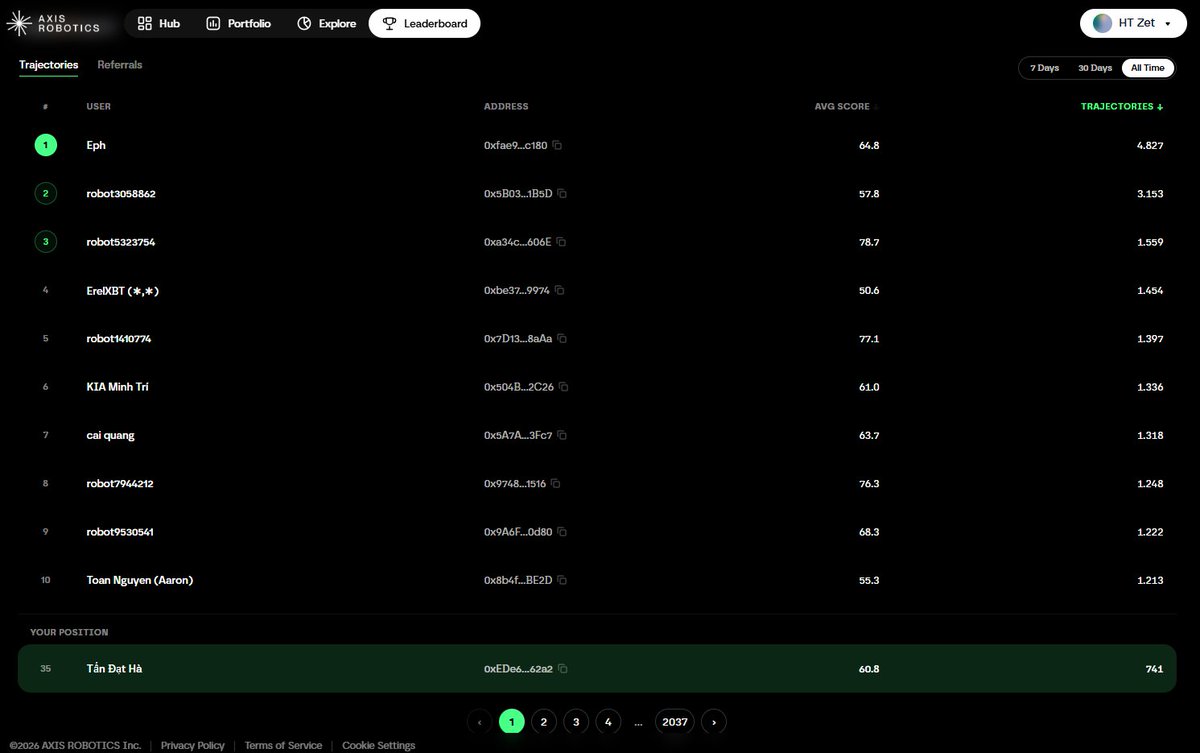
1M trajectories generated on Axis.
A major milestone for our distributed Physical AI data engine.
1
3
209
Jun 6
Partnership BitRobot Network x Axis Robotics (SN/04) là bước tiến thông minh để giải quyết **bottleneck data** lớn nhất của Physical AI / Embodied AI hiện nay.
Thay vì chỉ vài lab lớn đóng cửa thu thập data, mô hình này mở rộng teleoperation trong simulation qua mạng lưới cộng đồng toàn cầu:
- Dễ tiếp cận (không cần hardware thật)
- Scale nhanh
- On-chain verify dual rewards
Kết quả là dataset chất lượng cao, đa dạng hơn, giúp huấn luyện robot policies generalizable thực sự — từ pick-and-place đến các task phức tạp sau này.
Đây chính là cách “robot intelligence is built by all” trở thành hiện thực, không chỉ slogan. Rất mong được early access để contribute và test skills.
Open robotics lab đang đi đúng hướng! 🚀
@BitRobotNetwork @axisrobotics
Jun 4

1/ We’re doubling down on teleop-in-sim data capture. SN/04 is now live on BitRobot with @axisrobotics.
Early users will get private access to train robots and earn rewards across both ecosystems.
Comment “gbot” if you want fast-track access ↓
2
111
Zet (✱,✱) retweeted

Jun 4
1/ We’re doubling down on teleop-in-sim data capture. SN/04 is now live on BitRobot with @axisrobotics.
Early users will get private access to train robots and earn rewards across both ecosystems.
Comment “gbot” if you want fast-track access ↓
570
176
420
25,816
Jun 6
💡The One-Click DeFi Economy 💡
DeFi promised to make finance accessible to everyone. Instead, it turned users into full-time portfolio managers.
Every day, participants face dozens of complex decisions:
⌛️Which protocol offers the best yield right now?
⌛️Which chain should my capital be on?
⌛️When should I rebalance?
⌛️Which incentives are ending soon?
⌛️How do I manage my risk exposure?
The result? Most users only deploy a fraction of their capital — or miss opportunities entirely — because managing DeFi has become exhausting.
Most users want outcomes, not operations.
Why is DeFi so complicated ?
It’s not by accident.
True yield opportunities in DeFi often require combining multiple protocols, bridging across chains, constantly monitoring incentives, manually compounding, and actively adjusting risk.
Users have effectively become the execution layer. They’re forced to act like professional fund managers just to earn competitive returns. This friction keeps the majority of capital on the sidelines or in low-efficiency positions.
The Solution: Let Infrastructure Handle the Complexity
The next evolution of DeFi isn’t giving users more tools and dashboards.
It’s building powerful infrastructure that absorbs all the operational complexity — so users can focus only on capital allocation and risk preference.
This is the essence of one-click DeFi.
Concrete Vaults: Infrastructure That Actually Works
Concrete Vaults are designed to solve exactly this problem. Instead of manually chasing yields, users simply deposit capital into a vault and let professional-grade infrastructure do the heavy lifting:
- Automated compounding — Rewards are reinvested continuously without manual intervention.
- ctAssets — Structured assets that represent optimized, diversified DeFi strategies.
- Strategy automation — Vaults dynamically adjust positions based on market conditions and incentives.
- Onchain capital deployment — Everything executes transparently and trustlessly on-chain.
- Structured DeFi — Seamlessly combining multiple protocols and chains into clean, high-performance strategies.
With Concrete, you no longer need to be a portfolio manager. You just allocate capital and let the infrastructure work.
Real Benefits of This Model
- Significantly higher capital efficiency — Your money stays working at all times.
- Dramatically reduced operational burden and human error.
- More consistent risk-adjusted yield through professional execution.
- Scalable for both retail users and institutional DeFi.
- Better user experience while maintaining full on-chain transparency and non-custodial control.
This bridges the gap between the simplicity of CeFi and the permissionless power of DeFi.
The Bigger Shift Ahead
The future of DeFi is not about giving users more features and decisions.
It’s about reducing the number of decisions users need to make.
Will users continue managing complex strategies manually? Probably not.
Most people want one-click DeFi — one click to deploy capital intelligently, safely, and efficiently.
Vault infrastructure like Concrete is becoming the default interface for onchain capital deployment.You shouldn’t need to be a DeFi expert to earn great yields. You just need the right infrastructure.
Explore Concrete at: concrete.xyz/
#ConcreteVaults #DeFi #oneclickDeFi #ctAssets
31
Jun 5
Great move, Axis! 🚀 @axisrobotics
Shifting focus toward long-horizon tasks and cross-embodiment data collection is a smart and necessary step. Most real-world valuable tasks are long and require adaptation across different robot morphologies and control interfaces.
I’m especially interested in your use of staged checkers. This seems like a clever way to turn complex long-horizon problems into clearer, more stable training signals. Would love to know how much it has improved success rate or sample efficiency compared to your previous approaches.
Looking forward to seeing how this higher-quality, more diverse data pushes your models further in bimanual manipulation and sim-to-real transfer. Keep leading the frontier! 🔥
#ai #robotics
Jun 5
We recently launched a new set of robotic data collection tasks, with a focus on long-horizon tasks (LH) and cross-embodiment tasks (Multi Embodiment). These include bimanual teleoperation and task adaptation across different robot morphologies.
Why this matters:
1. Axis is moving toward more complex, real-world robotic tasks.
2. Long-horizon tasks make complex data collection more scalable in simulation.
3. Staged checkers turn long tasks into clearer training signals.
4. Cross-embodiment tasks help Axis support multiple robot forms and control modes.
5. Axis is improving both the diversity and complexity of data.
6. The goal is not just more data, but more valuable data.
Details below. 🧵


1
70
Jun 5
Cập nhật một tí về Axis @axisrobotics
Ngoài các Badge đã cập nhật trước đó thì Axis đã ra thêm hơn 10 nhiệm vụ để truy cập vào Bitrobot tuy nhiên phần này cần phải có code để có code cũng khá đơn giản cần có role X trở trở có thể join tele để xem
t.me/AxisroboticsVietnam/1
Về Badge thì có 3 badge mới
🤖I know a guy: Mời ít nhất 10 ref ( mỗi ref phải hoàn thành ít nhất 1 task )
🤖Headhunter: Mời ít nhất 30 ref ( mỗi ref phải hoàn thành ít nhất 1 task )
🤖Social king: Mời ít nhất 50 ref ( mỗi ref phải hoàn thành ít nhất 1 task )
Chương trình hợp tác với Bitrobot diễn ra có giới hạn tranh thủ lúc còn kịp 👇👇👇
hub.axisrobotics.ai/login?in…
Nếu sử dụng link ref của mình tài trợ toàn bộ phí trong quá trình làm task
#ai #robottics

3
82
Jun 4
Axis Robotics just announced a major collab with @BitRobotNetwork @axisrobotics
We’re launching SN/04 — the first Teleop-in-Sim mission on BitRobot, the open robotics lab on Solana.
This isn’t just another partnership.
The future of Physical AI cannot be built by a few closed labs alone. To truly scale, we need distributed human demonstrations — thousands of people generating high-quality training data across diverse scenarios, environments, and behaviors.
Axis BitRobot is making this real: anyone can contribute meaningful robotics data through web-based simulation, while earning rewards from both ecosystems.
No Solana transactions. No gas fees. Just pure contribution and rewards.
How to join: Axis members with full X, Y, Z roles can claim access codes via Discord ticket.
First batch: only 1,000 codes.
Tasks drop daily at 12:00 PM UTC.
This is how we decentralize Physical AI development and accelerate real progress in robotics.The future is being built by all of us, one simulation at a time Original thread ↓
Here task Axis and Bitrobot:
hub.axisrobotics.ai/login?in…
#ai #robotics
Jun 4
Announcing our collaboration with @BitRobotNetwork!
Axis is launching SN/04 on BitRobot, the open robotics lab on Solana that coordinates distributed contributors to accelerate Physical AI research.
SN/04 is a teleop-in-sim mission where contributors complete web-based robotics simulation tasks, generate valuable training data, and earn rewards from both ecosystems.
Together, we’re scaling human demonstrations for Physical AI — powered by everyone.
Rules and details below ↓
3
144
Jun 4
🤖Axis Robotics Progress Update: Building Physical AI with the Global Community @axisrobotics
What started as a simple web-based teleop has evolved into a full closed-loop pipeline: TaskGen → Simulation augmentation → Data cleaning → Model training → Sim-to-Real transfer.
Key achievements so far:
✅Hundreds of thousands of trajectories contributed by the global community
✅TaskGen now supports articulated objects (cabinets, dishwashers, drawers) long-horizon tasks
✅Strong cross-sim performance and improving sim-to-real results
✅End-to-end pipeline with data quality controls and domain randomization
Robot intelligence isn’t built by a few labs — it’s built by all of us.
#ai #robotics
3
5
100
Jun 3
Physical AI needs tight integration between industry and academia — not just lab research.Axis Robotics is doing this exceptionally well @axisrobotics
Instead of only building in isolation, they’re actively supporting the research community: sponsoring workshops, engaging directly with top researchers in Embodied AI and Multi-Agent Systems.
This week, the team is at ICRA (Vienna) and CVPR (Denver), bridging real-world deployment feedback with cutting-edge research.This is how you build a true compounding loop:
Real customer deployments → higher-quality data & tasks → stronger models → better research → even stronger products.
Not many teams can execute at both product and research level like this
#AI #robotics
1
3
45
Zet (✱,✱) retweeted
Jun 1
Axis Weekly
This week was about trust and transfer: making community data cleaner, generated tasks broader, and trained policies more robust as they move from simulation to real robots.
Key updates:
- Data quality: We completed a suspicious-user audit script to detect abnormal collection behavior using user statistics and replay/verify failure reasons.
- Webapp and simulation: We improved key gripper and asset interactions, including penetration, heavy-object grasping, and IK flexibility.
- Recover-from-failure: We tested Failure Task 892 and collected 300 failure initial states, with the next round moving to repaired and more randomized tasks.
- TaskGen: Articulated-object generation is now merged into the automatic generation pipeline, covering cabinets, dishwashers, drawers, and existing randomization workflows.
- Model and real-world stack: We completed the first round of fine-tuning, evaluation, and benchmarking, merged the π0.5 evaluation pipeline into the real-world stack, and started bringing a new embodiment into the loop.
A closer look at this week’s progress 🧵
May 25
Axis Weekly
This week, we focused on making the robotics data loop more measurable and reproducible: separating real user signals from bot traffic, expanding TaskGen into articulated-object tasks, and turning data-to-model workflows into repeatable services.
Key updates:
- Data quality: Task 805’s high failure rate was driven by bots, not real players.
- TaskGen: Codebase delivered for an upcoming update that will support end-to-end generation of articulated-object tasks from prompts.
- Simulation and data infra: Asset bugs fixed, and the automated recover-from-failure pipeline is nearing full deployment.
- Model training: Achieved a ~40% success rate in cross-simulation evaluation (IsaacLab to MuJoCo).
- Sim-to-real: Updated the domain randomization roadmap to heavily boost physical parameter diversity.
A closer look at this week’s progress 🧵
98
53
186
23,602
Zet (✱,✱) retweeted
Jun 1
Axis Robotics is actively supporting and collaborating with leading researchers in Physical AI.
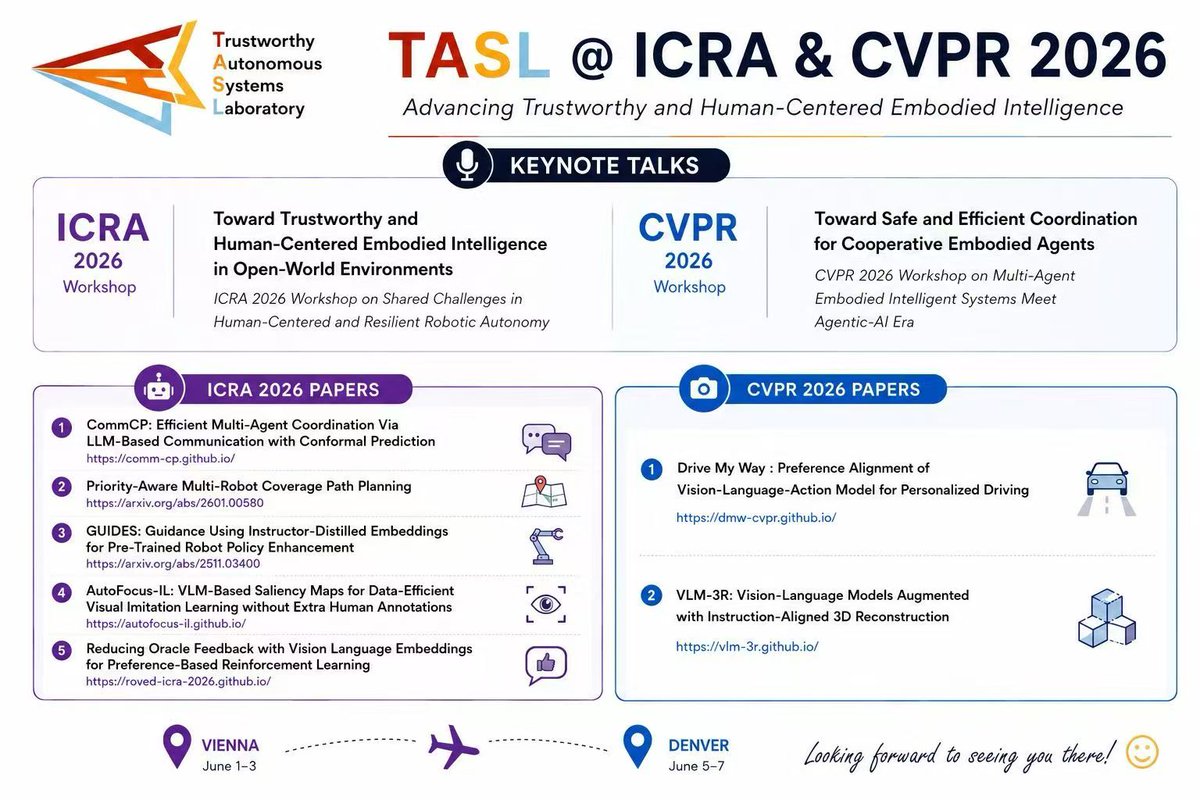
If you’re at ICRA or CVPR this week, come connect with our advisors and team at the workshops.
See you in Vienna and Denver.


Feb 26
We are thrilled to sponsor the 3rd MEIS Workshop at CVPR 2026!
As Generative AI redefines Embodied Multi-Agent Systems, Axis Robotics is proud to support the researchers pushing the boundaries of multi-agent collaboration, simulation, and robustness.
🏆 Best Paper & Demo Awards (Cash Recognition)
📅 Deadline: Apr 15, 2026
📍 Join us in Denver on June 3rd
Let’s build the future of collective intelligence together. Check out the details from Prof. Tu @_vztu below!
90
66
191
15,780
Zet (✱,✱) retweeted
Jun 2
87
55
170
16,706
Zet (✱,✱) retweeted
Mar 24
Axis is officially LIVE on @base. 🔵
Axis is scaling Physical AI for the real world, contributed by everyone.
You can control robots in a virtual world, generate training data at scale, and help build the brain behind tomorrow's robots. All from browser. No hardware needed.
Start building robotics intelligence today: hub.axisrobotics.ai
322
268
1,021
229,356
Jun 3
Sau 2 tháng cùng đồng hành với @axisrobotics thì đây là cảm nhận chân thật nhất mà mình có được 🕯️
✅Đầu tiên Axis Robotics là dự án làm về robotics tập trung vào Physical AI ( trí tuệ nhân tạo ). Điểm nổi bật của Axis là dùng data simulation chạy mô phỏng trên browser train trực tiếp trên trình duyệt mà không cần GPU hay CPU mạnh rất phù hợp cho những người đam mê về Robot và trí tuệ nhân tạo đóng góp dự án.
🤖Mình đã train và đóng cùng với dự án hơn 700 bản mô phỏng với nhiều độ khó và vị trí vật thể khác nhau thì đây là một dự án rất đáng để hard qua các góc nhìn sau:
- Dev của dự án không đi theo đám đông công khai vòng gọi vốn từ các quỹ hàng đầu, không marketing rầm rộ thu hút fammer hay vào đó là chỉnh chu từng task được đưa ra cải thiện từng ngày.
- Mình vào dự án lúc những task beta đầu tiên lúc đó task rất lag và đơ không di chuyển được nhưng dự án đã khắc phục và cải thiện rất tốt qua phản hồi của user đóng góp đây là điểm đáng khen cho team dự án rất biết cách xây dựng cộng đồng,
- Quá trình làm task thì sau này mình đã quen hơn cải thiện rõ hơn qua từng ngày đối với mình task dễ thì mình làm rồi nên tập trung vào những task khó vì cần lượng data rộng hơn và chất lượng hơn để train
- Việc spam task giúp task chỉ tăng lên chứ nó không đồng nghĩa với chất lượng với mình nếu cảm giác task đó làm không được như ý thì làm lại tránh spam quá mức cải thiện kĩ năng tay mới là thứ quan trọng để train nếu không may mắn hơn có thể bị ban......
- Dự án cũng có cơ chế ban bot rất mạnh để nhường chỗ những user thật sự đây là điểm rất đáng khen của dự án khi ra tay truy quét từ đầu, để cho user thật sự thấy họ được công nhận là một phần dự án
- Bên cạnh việc làm task dự án thì cũng có một dạng đóng góp khác qua hình role đây cũng một phần quan trọng để lan tỏa về Axis
Cuối cùng thì dự án có một cộng đồng Việt Nam rất tuyệt vời với sự support rất nhiệt tình đến từ 2 mod và ambassador của dự án là @LihThooi và @mintt_34 cùng với tất cả anh em trong cộng đồng
Mọi người muốn đồng hành cùng với Axis và trend robotis sắp tới thì chắc chắn Axis là dự án không nên bỏ qua:
👉 hub.axisrobotics.ai/login?in…
#Ai #Robotics
2
5
101
May 30
A new Dapp on the Base ecosystem with low gas fees and fast speeds is @DustswapOnBase Currently, there is a program to accumulate PP to receive rewards, so take advantage of this opportunity to become a pioneer
Here: app.dustswap.wtf/?ref=DUST-2…
36