
The world’s largest camera infrastructure for mapping, autonomous driving, and physical AI. Join 260k drivers and earn rewards. Powered by @Solana.
Joined April 2022
- Tweets 3,351
- Following 119
- Followers 140,118
- Likes 7,353
1,192 Photos and videos














Jun 11
One centralized data pipeline can't cover the world. 🔍
NATIX does it differently: Decentralized collection, global scale, every road, every market, every edge case.
Because the gap between AV demos and AV deployment is a data gap.
2
6
28
1,066
Jun 10
NATIX is at the center of some BIG moves in the autonomous driving world 🚗
From World Models to VLMs and End-to-End models, data is the key that binds them together.
It's only a matter of time before Physical AI takes over, and the ones building it are using NATIX data 💪
5
15
52
1,777
Jun 8
The city-by-city playbook made sense in 2016. ⚡️
It doesn't anymore.
Autonomous systems need edge cases from all over the world, not just one city at a time.
2
7
35
1,357
Jun 7
The data collected for Physical AI training is important, but is it also important who collects that data?
0%
Expert drivers
50%
Day-to-day drivers
38%
A mix of both
12%
Doesn't matter
8 votes • Final results
3
2
21
1,560
Jun 5
Our May Progress Update dropped:
📹>176K Hours of Multi-Camera Footage
💹>6.78B $NATIX Staked
💎VX360 HODL Clubs launched
📺How video turns into intelligence
🌐Physical AI's geography problem
Full recap👇
natix.network/blog/natix-net…
2
6
40
1,486
Jun 4
Raw footage is only the starting point.
NATIX turns real-world visual data into structured spatial intelligence by extracting road signs, lane markings, road geometry, and infrastructure assets at scale.
This is how roads become machine-readable. 🌎
1
9
43
1,893
Jun 3
If an AV can drive in New York, it doesn't necessarily know how to drive in Tokyo.
Different roads mean different driving behaviors. 🛣️
The only way to bridge that gap before sending autonomous cars into the real world is to have enough training data.
2
5
38
1,051
Jun 2
Heads up Drive& users, June 30th is coming fast 👀
That's your last day to withdraw and qualify for the staking campaign. Stake your $NATIX and earn up to 15% bonus on top of standard APY.
Make sure not to miss it 👇
natix.network/blog/earn-extr…
6
5
37
1,340
Jun 1
One view is never the full scene. VX360 captures the road from multiple angles at once.
More context means stronger real-world data for Physical AI. 👀
1
3
33
1,080
May 28
Autonomous driving is not just an algorithm race.
It is a geography problem. 🌎
Roads, signs, weather, and driving culture change everywhere.
That is why global data coverage matters 👇
natix.network/blog/autonomou…
4
9
45
1,658
May 28
3/
Nowadays, AV systems are deployed city-by-city, but this kind of autonomy does not scale.
Every new market means new roads, edge cases, maps, and tuning. 🚗
The future needs a data layer that can teach a vehicle how to drive in a different geography before it gets there.
1
20
827
May 28
4/
This is where NATIX comes in.
Our decentralized camera network captures real-world driving data across countries, climates, and driving cultures.
That is how Physical AI gets the geographic coverage it needs to scale. 🌎
9
523
May 27
World models need more than pixels.
They need motion, context, uncertainty, and all the edge cases that happen outside the lab.
That is why real-world video matters 📹
3
7
40
1,438
May 26
Some edge cases we can deal with, but what about the ones we have never encountered? 🤡🐎
Autonomy has a long way to go until it catches up to the unpredictability of the real world.
Luckily, NATIX is on it 🚗
1
4
46
1,953
May 25
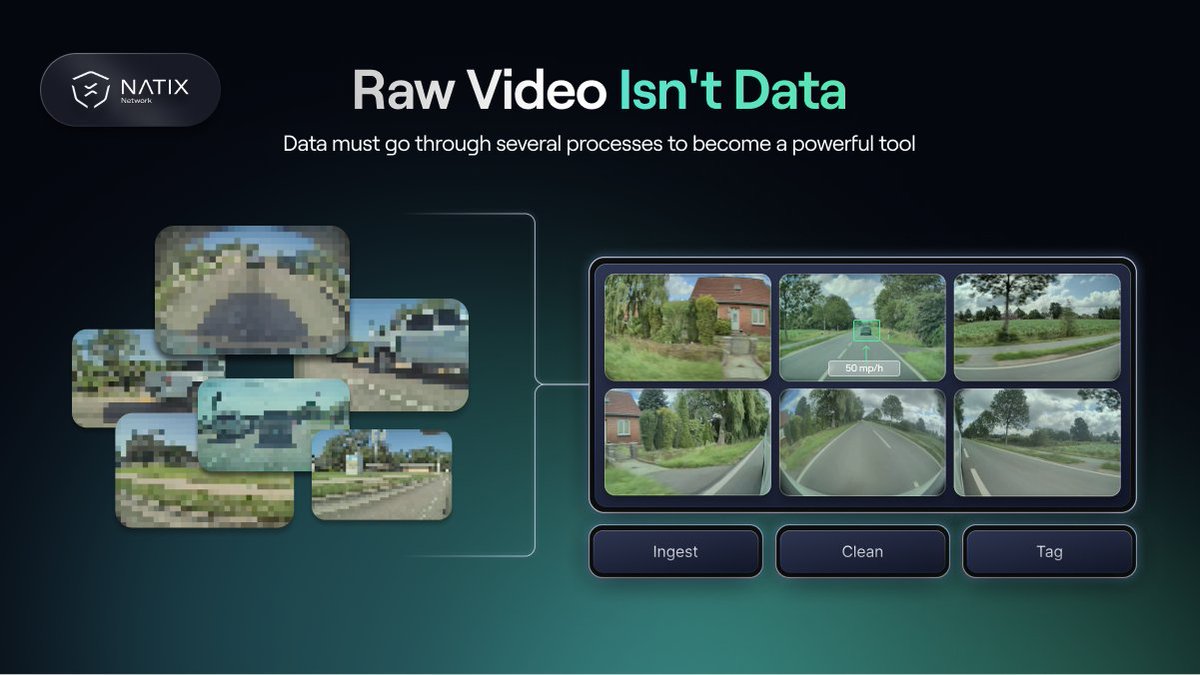
Raw video isn't a dataset.
It has to be ingested, cleaned, and tagged before it can train anything meaningful.
That pipeline is what separates footage from fuel. ⚡️
1
9
45
1,793
May 24
Where will the next billion driving miles come from? 🌎
20%
AV company fleets
10%
OEM-equipped cars
60%
Decentralized network
10%
Synthetic data generation
10 votes • Final results
4
2
31
2,309
May 22
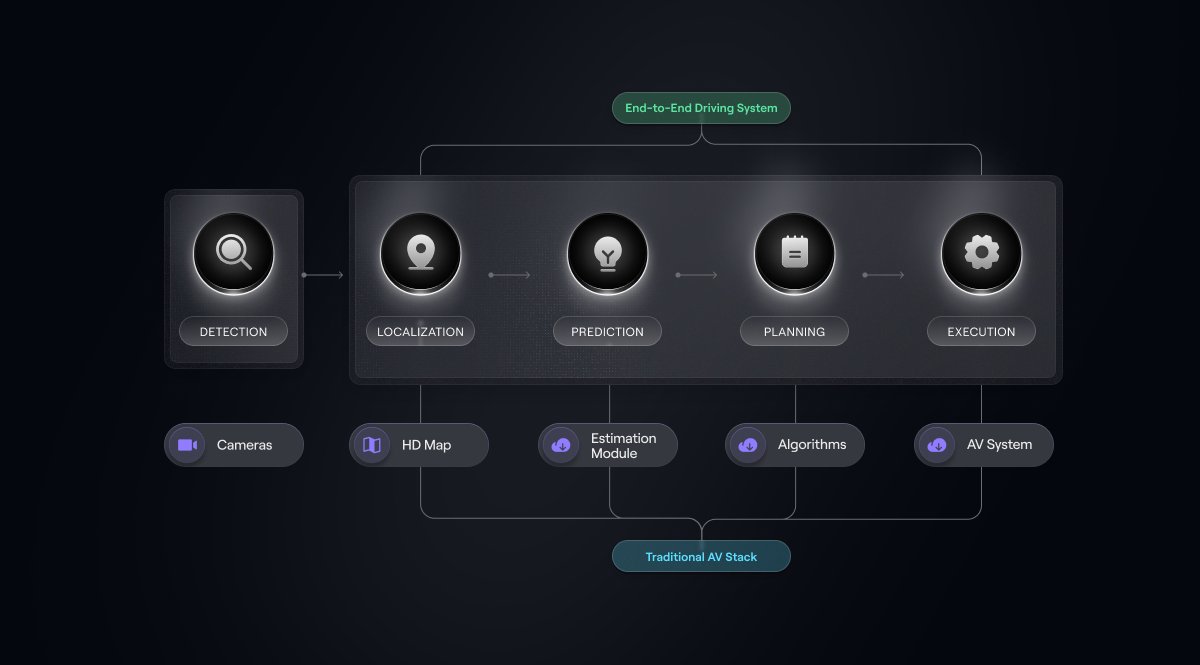
Cameras. HD map. Estimation module. Algorithms. AV system.
That's the traditional stack. Each box is hand-engineered, glued together, and maintained forever.
End-to-end collapses it all into one model trained on video. The bottleneck moved from code to data. 👀
1
8
46
2,131
May 21
Autonomous driving is no longer a sensor problem. It is a data infrastructure problem. 🚗
Raw video is not a dataset. What a self-driving system learns depends almost entirely on what happens after the recording ends 👇
natix.network/blog/dashcam-t…
4
11
50
3,087
May 21
3/
The harder problem is the long tail. The rare scenarios that decide whether a system is safe.
You cannot schedule edge cases. You catch them at scale, across regions and angles. VLMs surface them. Multi-camera footage shows the full scene. 🔍
1
1
16
976
May 21
4/
This is why NATIX is building an open-source multi-camera World Foundation Model with Valeo.
The footage is the starting point. The pipeline is what turns it into intelligence. ⚡️
9
605