
Working on world models in Hardware and Virtual Experiences || Ex Engineer @somnia_network @naughty_dog @ Eoth || 2x features on @80level
Joined January 2021
- Tweets 18,367
- Following 901
- Followers 3,439
- Likes 36,941
2,921 Photos and videos














Pinned Tweet

Jun 13
Human life is finite, the impact of purposeful action can outlast a lifetime.
Develop a strong sense of urgency, we have a lot to achieve, people.
1
5
71
Jun 13
Human life is finite, the impact of purposeful action can outlast a lifetime.
Develop a strong sense of urgency, we have a lot to achieve, people.
1
5
71
Jun 13
Fail fast and move forward. Progress favors action over perfection. Ask questions, sacrifice your time, and put in effort.
Let’s make this life a remarkable one
1
3
40
Jun 13
Embrace the fear of the unknown. You don’t need to have it all figured out at once.
3
28
Promise retweeted

Jun 12
What if motion planning, #simulation, and fleet management were already built in?
In this video on YouTube, Brandon walks through building a palletizer with Viam and getting boxes moving in about 30 minutes: youtu.be/hg4s2FmWRZc
1
5
21
2,171
Jun 13
Self Sabotage.
Proudly sponsored by Dario
Jun 13

The US government, citing national security authorities, has issued an export control directive to suspend all access to Fable 5 and Mythos 5 by any foreign national, whether inside or outside the United States, including foreign national Anthropic employees.
The net effect of this order is that we must abruptly disable Fable 5 and Mythos 5 for all our customers to ensure compliance.
Access to all other Claude models is not affected.
We apologize for this disruption to our customers. We believe this is a misunderstanding and are working to restore access as soon as possible.
Read our full statement: anthropic.com/news/fable-myt…
2
37
Promise retweeted
Jun 12
The process of how world models reason:
The major purpose is to have a model that understands the physical world.
On top of this, we are using LLM to interpret words for input and output but the reasoning layer is completely done by the world model itself.
The way further is either:
Using a vision model (see objects and reason)
Or directly running through hardware (sensors and world state)
View on a wider screen, I'll push up the frontend to be better.
May 20

One of the best ways to explore a gamified experience is when you can access it through hardware.
This is turning out well in Unreal engine with the drone and camera tracking
1
7
131
Jun 10
A very interesting question in this exploration is,
How do we optimize inference for knowledge reasoning on the hardware architectures we have today?
If we move toward world reasoning models, where systems continuously maintain and update representations of their environment, is the bottleneck really the model?
Or is it the software and hardware stack around it?
In robotics, we are increasingly running reasoning models on top of ROS and existing infrastructure. But does embodied intelligence eventually require a new runtime architecture designed around memory, planning, reasoning, and action from the ground up?
Curious how others think about this.
Do we need better models, better hardware, or a new systems architecture for world reasoning?

5
66

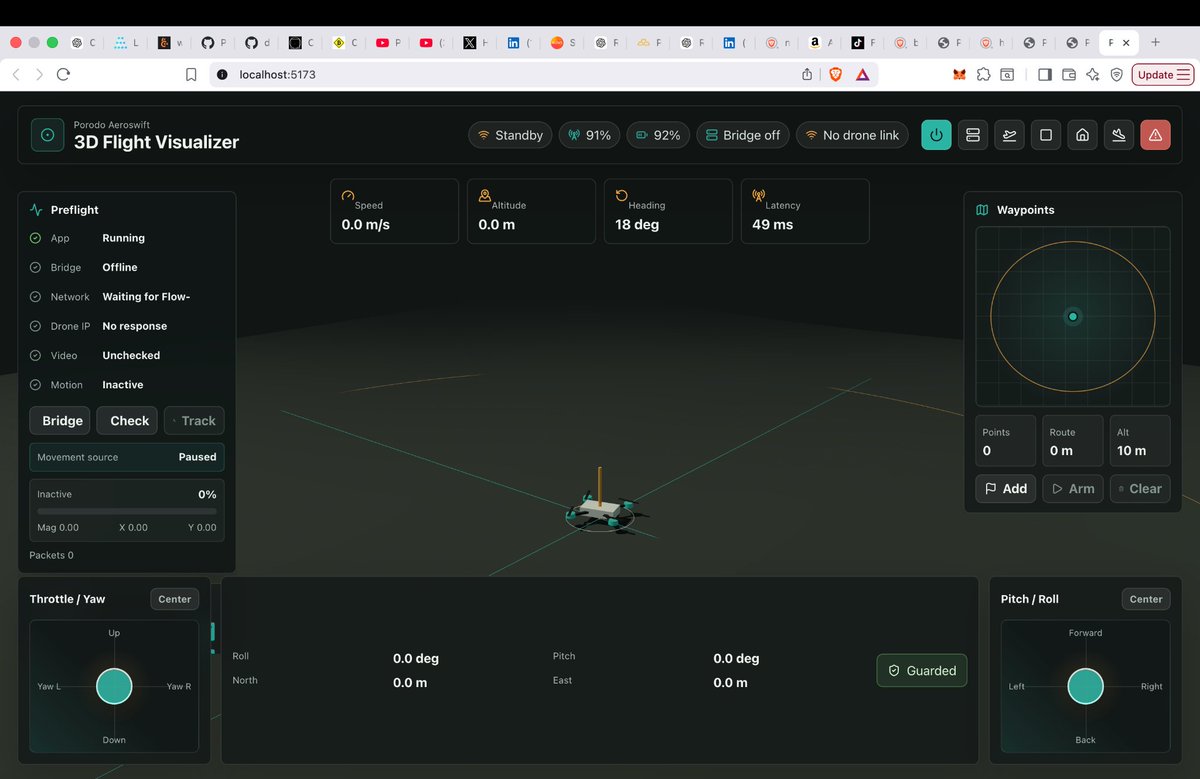
while building the agentic mode in SimArena, I kept thinking about the UX problem most GenAI platforms have: you fire off a prompt and wait minutes for the entire scene to load before you can interact with anything
I worked with @itsdamnvinci this week to make SimArena's workflow smoother. Instead of blocking operations, jobs run concurrently. scene objects stream in as lightweight placeholder boxes, then swap to final @NVIDIARobotics SimReady assets
now you can keep working while your scene renders. no more waiting
2
4
21
1,918
Promise retweeted

Jun 6
VLA-JEPA just dropped in LeRobot 🤖
What makes this model special is that it does not just learn what action to take from a given observation, it also leverages a JEPA world model to learn action-relevant dynamics.
During training, the VLA leverages V-JEPA2 by conditioning its predictor. This clever trick adds a world modeling objective to the training, which also allows pretraining on human videos.
At inference, the world model is dropped entirely, keeping only a standard VLA architecture: Qwen backbone and action head.
The demo here was only fine-tuned on 13 examples, showing great pretraining capability and running in real time on @NVIDIARobotics DGX Spark!
VLA-JEPA is the first world model to be ported to LeRobot, and I feel like it won't be the last 🚀
@Thom_Wolf @ClementDelangue
31
184
1,365
293,101

Promise retweeted
Jun 9
How world models turn raw vision into structured spatial representations
ALT How world models turn raw vision into deep understandable data
1
5
94

QVAC by @tether is live on peaq’s robotic.sh
Private, on-machine AI inference for robots and machines
Run it on the machine itself, or on one right next to it. The data stays private.
→ peaqOS provides identity and coordination
→ @qvac by Tether provides private, on-machine inference
robotic.sh/services/qvac

20
44
283
35,707

Jun 8
Diffusion reasoning models are going to be discussed a lot in the coming months, but in a very different way from how we've approached them so far.
2
38
Jun 7
Got a very beautiful rejection mail from YC.
Let's get this done regardless..
3
5
91
Jun 6
There are some things you should learn to see before everyone else does. It may sound crazy, but when you see them, act on them.

1
33
Jun 5
Founders are getting accustomed to the cost real quick.
Jun 5

You accidentally say "Hi" to Claude Opus 4.8 and it consumes 15% of your session limit.
2
64