
Powering autonomous vehicles & AI with a decentralized data infrastructure. #WorldModel Powered by @GEODNET | discord.gg/rovr-network
Joined March 2024
- Tweets 1,715
- Following 438
- Followers 5,374
- Likes 2,381
857 Photos and videos











Pinned Tweet

Excited to officially announce our strategic collaboration with MaprGo —— an AI-native mapping infrastructure company.
ROVR captures the physical world.
MaprGo understands it.
Together, we're closing the loop between physical sensing and semantic understanding, and building the pipeline that turns real-world data → spatial intelligence → world models.
The infrastructure layer for Spatial AI is coming online.
medium.com/@maprgo/maprgo-an…
6
22
41
23,988
💯
Jun 9

Our kids will judge us on how we regulate and progress AI and crypto innovations today.
6
1
6
759
A tiny innovation.
Not a breakthrough.
Not a revolution.
Just one more step forward.
Maybe it's worth celebrating with a cookie. 🍪
6
1
18
658
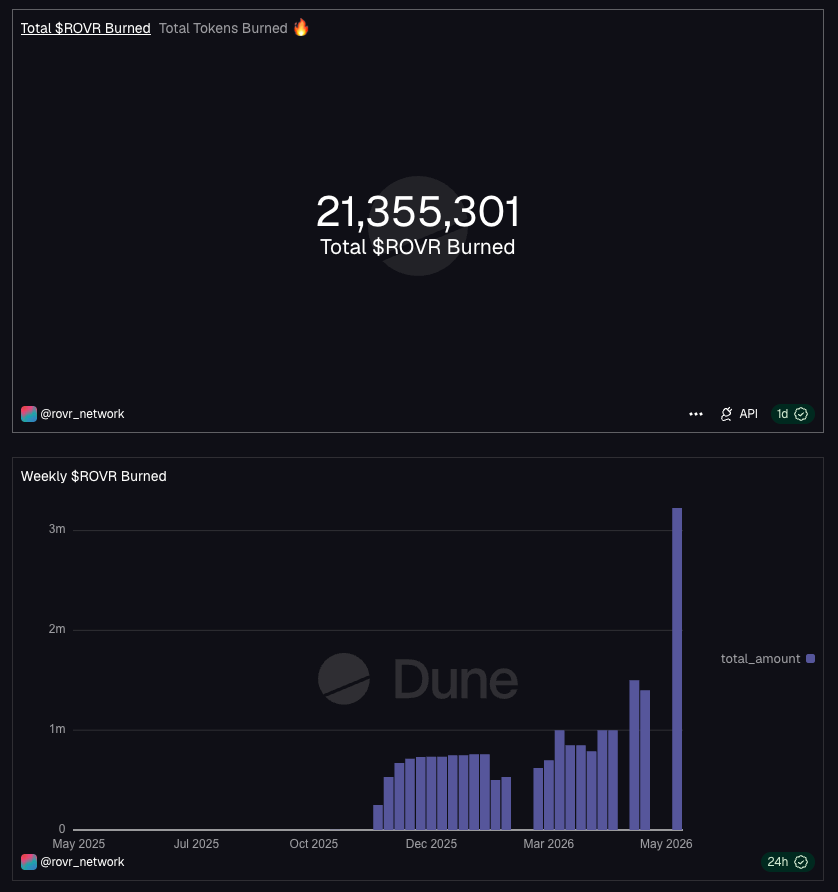
#ROVR keeps burning tokens.
Unlike many Web3 ecosystems, burned ROVR tokens can never be minted again. The supply is finite, and every burn permanently reduces it.
As real-world spatial data demand grows, the available token supply only gets scarcer.
Burned means gone forever.
2
1
16
693
ROVR 🌐|World Model Builder retweeted

May 31
Between this Waymo and Zoox, there’s a total of 80 main sensors.
• 13 Lidar Sensors
• 51 Cameras
• 16 Radars
The self-driving problem is not a sensor problem, it’s an AI problem.
May 31

Self-driving cars are fun because you never see competing SaaS products having a literal standoff in the street
22
46
407
23,660
We need a name for the ROVR model.
Huge thanks to the ROVR data contributors.
You created massive amounts of consistent real-world data, with LiDAR providing true 3D geometric constraints. We’re standing on the shoulders of giants.
That’s why the model performs so well in understanding reality.
But please…
No more “Deep”.
DeepThis.
DeepThat.
DeepEverything.
Reality deserves a better name.
3
4
466
ROVR’s model can transform daytime scenes into nighttime environments.
If you look carefully, you’ll notice this isn’t just a visual filter — the environment is modified based on real-world data.
ROVR’s reconstruction is becoming so realistic that it’s hard to tell what’s real and what’s generated.
Even the dynamic objects still obey physical consistency.
Pretty cool, isn’t it?
2
8
391
A small but important milestone for ROVR.
Our world model is starting to edit driving environments while preserving the physical structure of the scene.
In this demo, the same driving sequence is transformed into different environments — grassland, desert, and more — while maintaining motion, viewpoint consistency, and scene geometry.
This matters because the future of autonomous driving data will not only be collected.
It will be simulated, edited, and regenerated under controllable physical constraints.
ROVR is building toward that future.
1
12
384
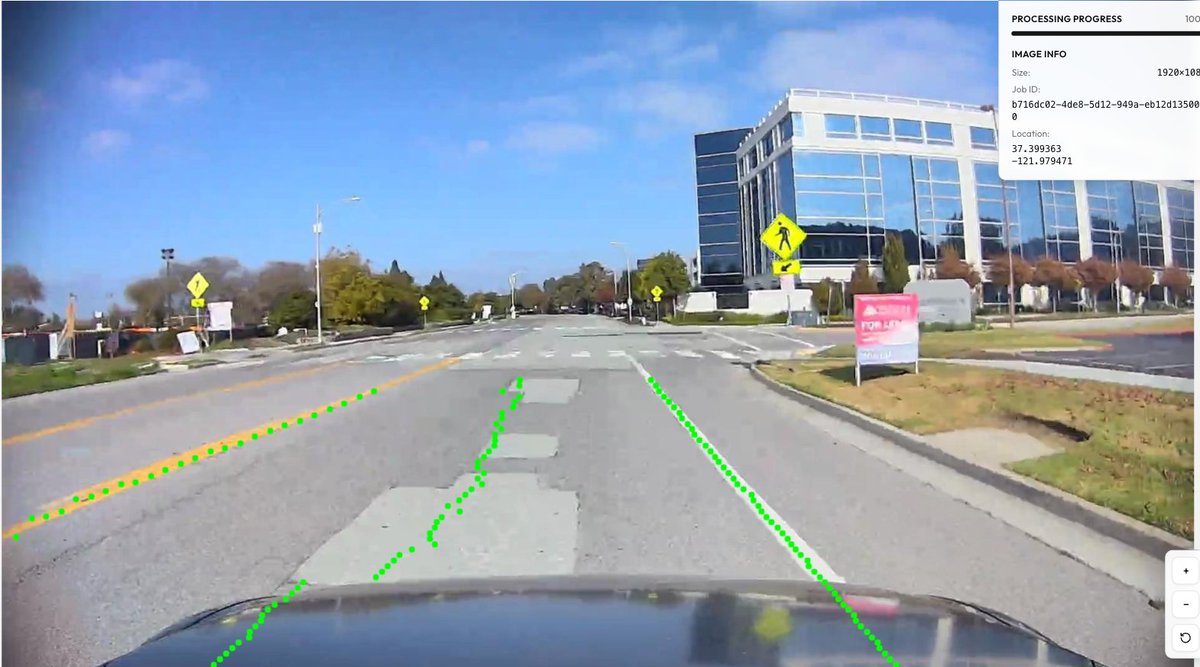
The future of transportation is being trained right now.
Every mile driven = more real-world data, more spatial intelligence, more capable AI.
#ROVR #ADAS
May 17

“It's a little freaky not to have a driver,” says @AndersonCooper as he rides in a Waymo robotaxi. cbsn.ws/4ut1Hb6
123
2
10
789
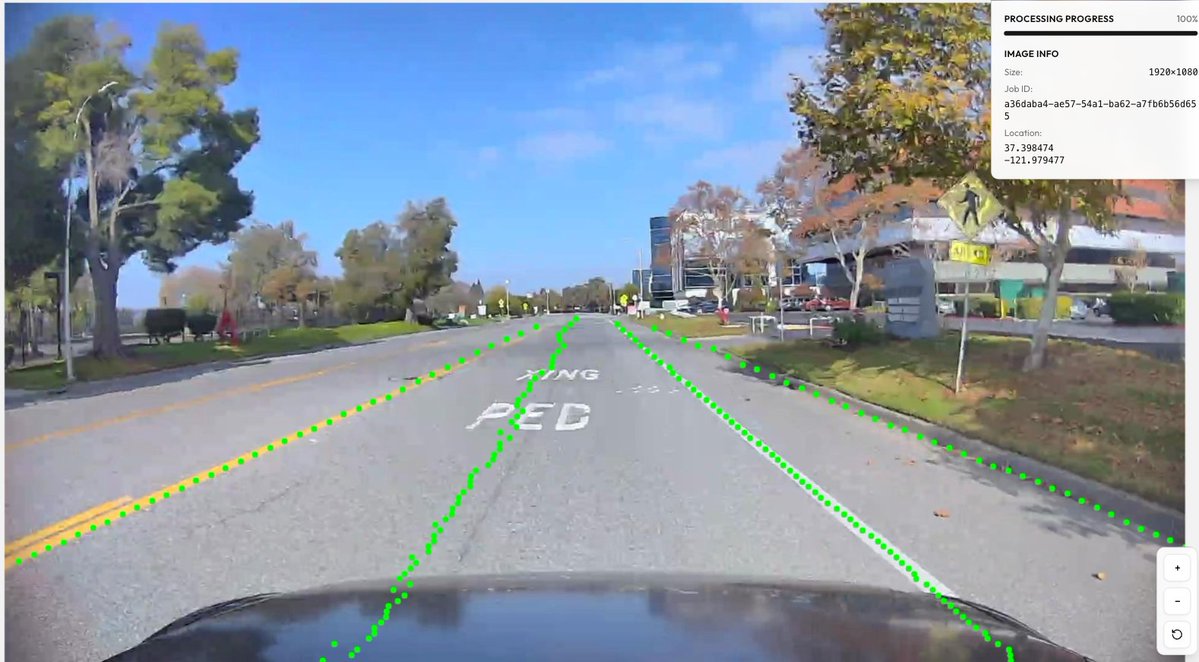
Smarter AI needs a smarter understanding of the real world.
That means:
• real roads
• real environments
• real spatial data
As robotics, autonomous systems, and world models accelerate, the demand for high-quality real-world 3D data is only growing.
That’s the infrastructure layer we’ve been quietly building at #ROVR
#AI #SpatialAI #Robotics #DePIN
13
3
21
629
World models need real-world data. Not text or simulation.
The kind that only exists on actual roads, in actual environments.
That's exactly what #ROVR is built for.
#SpatialAI #WorldModel

🔸Goldman calls it the next frontier.
🔸LeCun calls it the path to AGI.
🔸Fei-Fei Li calls it spatial intelligence.
All of this runs on data the internet doesn't have. That's the layer we're building at 375ai.
Read Goldman's blog for more: goldmansachs.com/insights/ar…
6/
6
2
16
898
ROVR 🌐|World Model Builder retweeted

2
3
14
846
Everyone’s talking about AI.
Models are getting bigger, smarter, faster.
But one thing hasn’t changed:
AI still depends on real-world data.
11
2
11
539
That’s what we’ve been building.
A network that turns real-world movement
into structured, usable spatial data.
1
2
6
358
2
8
320
Starting from the TGE on April 26, 2025, the base rewards for $ROVR are designed to decrease by half on an annual basis.
The next phase is coming soon —
designed for long-term sustainability and growth.
7
2
14
862
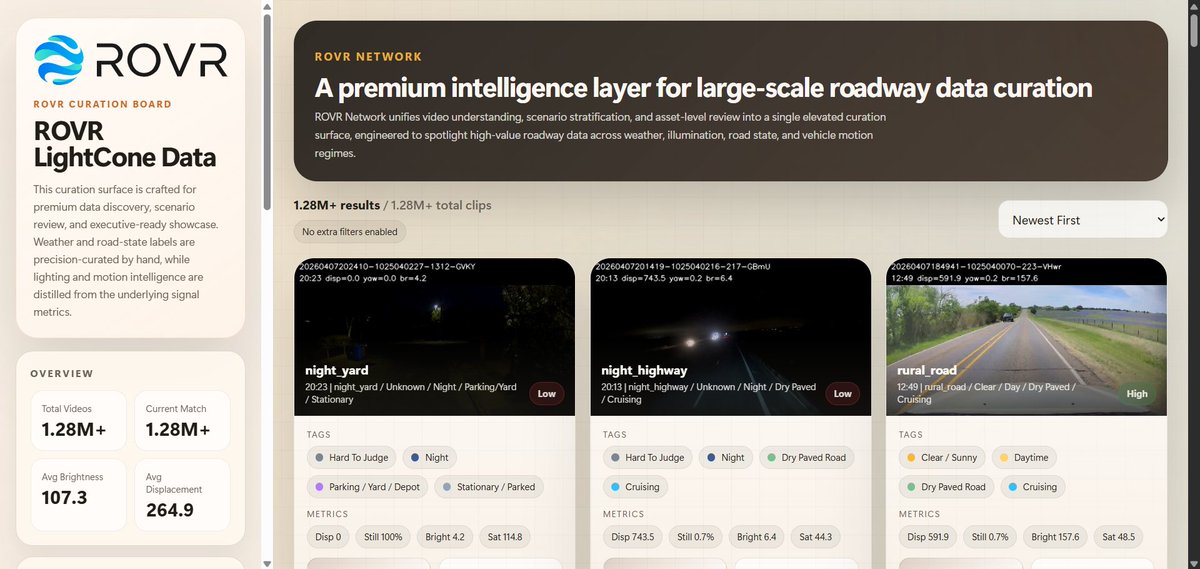
Introducing ROVR Curation System—
a premium intelligence layer for large-scale roadway data.
From raw signals to refined insights:
precision-labeled, scenario-ready, and built for Spatial AI.
#ROVR #SpatialAI #DePIN
1
3
14
823
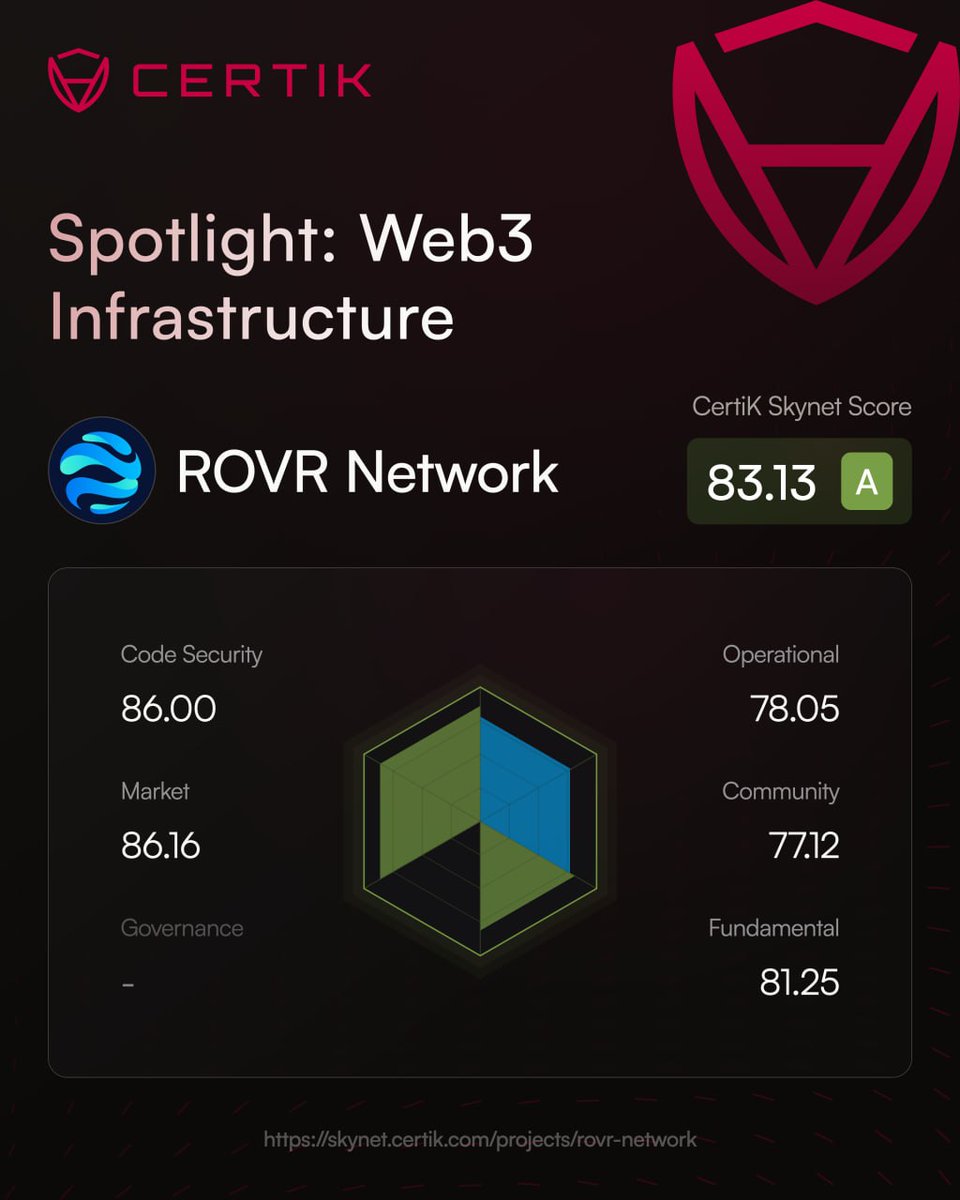
Proud to be featured in @CertiK Spotlight: Web3 Infrastructure Leaderboard.
Building the real-world data layer for Spatial AI — one step at a time.
Check it out 👇
skynet.certik.com/featured-b…
3
13
747
🏆3x rewards are now live. Duration: 3 months
Real data demand → boosted incentives.
If you’re in the region — or planning to deploy — now is the time.
Let’s build.
#SpatialAI #DePIN #ROVR
4
8
27
2,314