
Joined January 2017
- Tweets 169
- Following 2
- Followers 878
- Likes 399
7 Photos and videos







Pinned Tweet

13 Dec 2021
Let's go!!!
13 Dec 2021

@SchematicVC is the most active, early-stage investor in supply chain technology in Pitchbook's Q3 2021 VC update.

1
3
Schematic Ventures retweeted

6 Oct 2025
Strong start to #SFTechWeek starting super early for Physical AI event.
Hosted by @SchematicVC, where their portco pitched their solutions.


2
4
214
Schematic Ventures retweeted

6 Oct 2025
Breakfast bites, brilliant minds, and conversations on embodied systems, intelligent hardware, and the future of physical AI @SchematicVC @ananyavasagiri



2
9
1,533
4 Sep 2025
Check out Ananya Vasagiri's new series on robot AI infra starting with training data! 🤖 💡
linkedin.com/pulse/observati…
105
26 Jul 2025
We're thrilled to officially announce @SchematicVC's investment in CVector: the data backbone for industrial AI. Founded by highly technical engineers and researchers from Shell and CERN, CVector enables operators to plug in AI agents, run hybrid physics-informed models, and deploy self-healing troubleshooting capabilities.
techcrunch.com/2025/07/24/th…
1
5
265
Schematic Ventures retweeted

19 Nov 2024
Building in supply chain / manufacturing or software infrastructure? Here's an investor you should know...
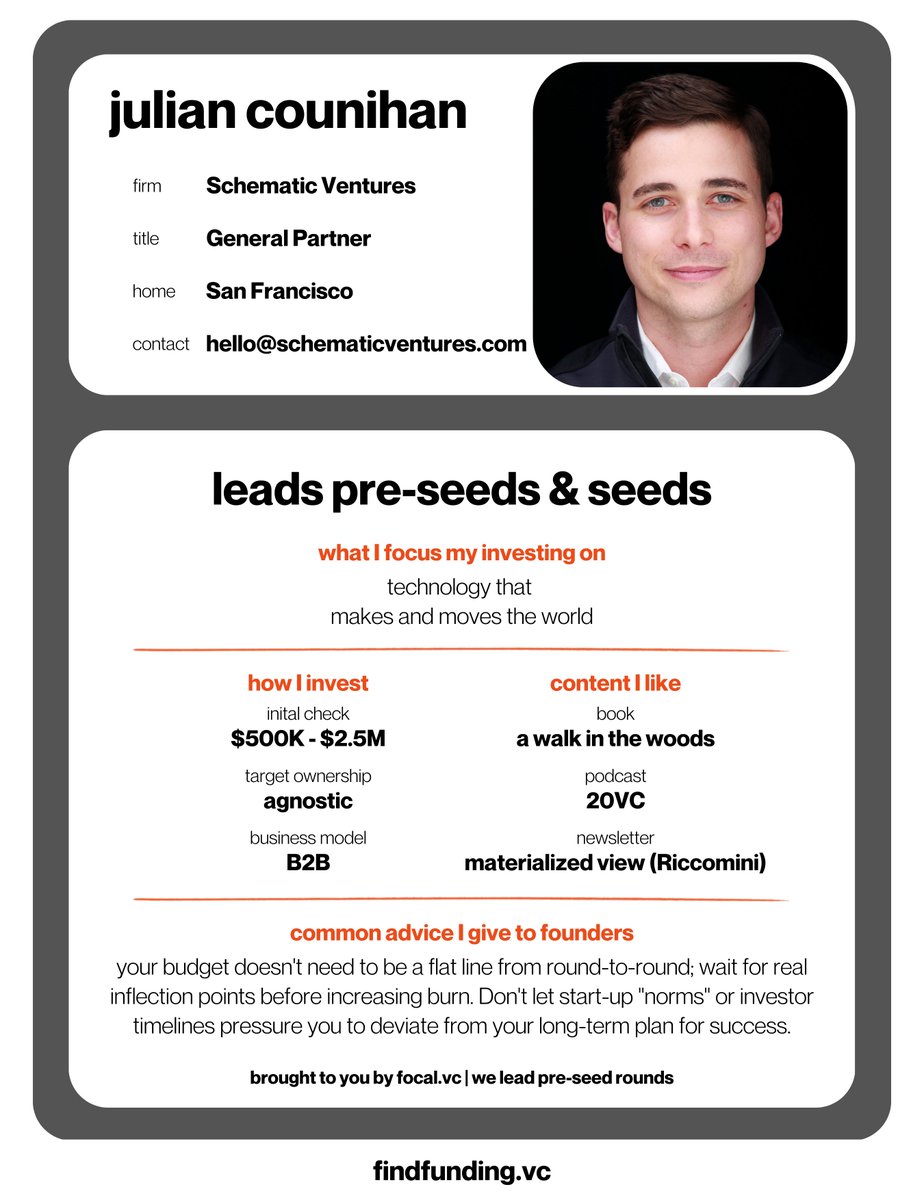
This week's findfunding.vc spotlight is on Julian Counihan (@NYCounihan) from @SchematicVC. He:
🌁 Is SF based
🏭 Started in tech as a software developer at Fortna where he worked on warehouse control & automation systems
💯 Has a 100% success rate for companies raising follow-on capital!
Amongst founders, Julian and his team at Schematic, including @AlexFreedSF, @araghupathy_ and @ananyavasagiri, are known for bringing both deep sector networks & technical expertise that accelerate the path to product market fit.
To get in touch, make sure to:
✉️ Pitch him at hello@schematicventures [dot] com
🤖 Check out Schematic's upcoming RoboCode event in SF - lu.ma/6ffg1dzd
For more, check out our funder spotlight card below along with Schematic's profile on findfunding.vc
3
7
537
Schematic Ventures retweeted

15 Nov 2024
Had an awesome time at re:Supply RoboCode last night, thanks to @SchematicVC! 🚀
Explore the future of robotics as we unravel opportunities, tackle challenges, and integrate LLMs into today's robotic landscapes. 🧵
1. Robots Are Hard to Simulate
•Simulation is a crucial step before real-world deployment—a step often overlooked by eager startups, resulting in unforeseen problems during deployment. NVIDIA's IsaacSim seems to the go-to platform for these essential tasks, but setting up a simulation environment is complex, costly, and often doesn't capture real-world edge cases.
•Edge Cases and Testing Strategy: Establishing realistic edge cases is vital. Simulations should be used to identify what and where to test in physical environments.
•Platform Choice and Speed of Iteration: Software simulation allows for faster iterations than hardware testing. This advantage should be leveraged to make development more agile.
•Challenges in Simulation: A key focus is simulating adversarial or constrained environments, particularly in defense, remote deployments, and situations with limited bandwidth or impractical cloud processing.
•DALUS AI: Uses your phone to create a NERF of your environment using gaussian splatting. Integrate the resulting opacity and mesh values into your simulation environment, drastically increasing realism. Essential for addressing real-world issues like sensor mis-calibration, unexpected human interactions, and sensor obstructions.
More info: dalus.ai/
2. Deployment and Integration Strategy
• Market Approach: Mature enterprises are essentially betting their business on your robots. As such, companies are cautious and require a lot of assurance and credibility from robotic solutions. This necessitates addressing all aspects of the deployment process, not just technological readiness.
• Complete Solution Requirement: Customers expect 100% of the problem to be solved; "99.99%" is not enough. A comprehensive solution extends beyond technology to include integration, support, change management, and maintenance.
3. Robotics as a Service (RaaS)
•Incentive Structure Flaws: Startups in the RaaS sector often face pressure to over-engineer or introduce unnecessary complexity. This results in inflated costs and increased implementation challenges, yielding minimal returns on essential functionality.
•Simplicity in Design: There is a significant gap in creating straightforward, maintainable robotic systems. The current ecosystem lacks incentives for simplification, leading to "robot graveyards," where projects are abandoned due to impracticality.
@samanfarid from @goformic is building the plug-and-play robotics platform for SMBs
4. Current Challenges with ROS (Robot Operating System)
•ROS Limitations: Though valuable for prototyping, ROS falls short of production standards due to reliability and integration issues. We need a shift towards a more robust alternative that can handle production-level demands.
•Platform Ambitions: Companies like Basis Robotics aim to enhance ROS by controlling the entire stack. This promises a better developer experience, deterministic testing, and comprehensive replay functionality.
More info: basisrobotics.tech/
5. Developer Tools and Robotics-Specific IDEs
•Need for Robotics-Specific Tooling: Current DX (Developer Experience) and instrumentation for robotics are insufficient. There’s potential to improve the DX by addressing these tooling gaps.
•Copilots for Robotics: Tools like @FidLabs, who offer a VSCode extension optimized for C and embedded environments, are becoming essential to address the complex needs of robotics development. They also effectively aggregate tons of robotics-specific knowledge, especially for niche or challenging imports into existing tooling, would helps streamline development and reduce redundancy.
• "Last Inch" Deployment: Interface tools that bridge traditional algorithms and newer foundation models are where significant value lies. This “last inch” of interface integration is essential for seamless deployment.
6. Collaborative and Decentralized Robotics Development
•Multi-Robot Systems: Moving from individual robotic control to orchestrating fleets of robots highlights the need for inter-robot communication, synchronization, and low-latency decision-making.
•Challenges with Cloud Processing: Latency and availability concerns make cloud processing infeasible for real-time applications in robotics, furthering the need for on-device intelligence and edge computing.

2
8
414
Schematic Ventures retweeted

11 Nov 2024
Thursday 11/14 (cont'd)
‣ AccelerateHER Female Founders Pitch Workshop: Mastering Investor Conversations lu.ma/uwtmoiij
@HERConnections
‣ AI Leaders HH Series lu.ma/i0zg86zn
@braintrustdata
‣ re:Supply RoboCode lu.ma/6ffg1dzd
@ananyavasagiri @araghupathy_ @NYCounihan
‣ The Path Ahead | Investor Summit lu.ma/pathahead_nov14
‣ 118th SF Hardware Meetup @ Future House | AI in Biotechhttps://lu.ma/ewp279l3
@michaelraspuzzi
‣ Conscious AI Meetup: Human Nature lu.ma/k0ex2vcq
@Plinz @eraqian
‣ AI Growth Marketers Meetup lu.ma/fzu0co6e
@theaievangelist
1
2
5
931
Schematic Ventures retweeted

10 Sep 2024
🦾Today we announce a $5M Seed round led by @ironspringVC w/ @HaystackVC, Supply Chain Ventures, @RemusCapital, ExpansionVC, @AmarHanspal, @SchematicVC and @BeePartners. This is only the beginning as we expand the Reshape Industrial Automation Hub. At #IMTS? Come check us out!
3
4
2,035
Schematic Ventures retweeted

14 Aug 2024
If you are headed to @IMTSchicago, I'd love to meet up there and see you at our event!
lu.ma/vns16xs1

2
7
402
6 May 2024
Congrats to @SchematicVC founder & GP @NYCounihan for being recognized for the second year in a row as one of the industry's top seed investors on Business Insiders' 2024 Seed 100 list! 🏆
businessinsider.com/seed-100…
1
141
Schematic Ventures retweeted
23 Feb 2024
@SchematicVC's re:forge Manufacturing Startup Showcase last night was awesome! It was great to have Litmus, Industrial Next, Redshift, Advex AI, and Terrantic share their visions for transforming #manufacturing!
@PedroPachuca4 @LAutomation @AlexLazich @jyounes2 @lukaspankau


1
2
6
497
22 Jan 2024
At the end of each year, @SchematicVC gathers a group of senior supply chain executives from our portfolio to share their thoughts on the industry's defining trends. As always, the Schematic "Predictions from the Pros" is your guidebook to navigating the unpredictable year ahead.
linkedin.com/feed/update/urn…
1
209
Schematic Ventures retweeted

7 Nov 2023
Just signed a term sheet for @SchematicVC's largest investment in our seven year history. Let's go!
6
3
63
4,894
3 Nov 2023
Next, lunch and a few hours of fine tuning before the demos go live!
2
2
151
3 Nov 2023
And that's a wrap! Congrats to the winning teams and a big thank you to all of our judges.
1
129
3 Nov 2023
#DevBot Hackathon!




1
1
186
Schematic Ventures retweeted
30 Oct 2023
Friday 11/3
‣ Female Founders Walk lu.ma/tvx4o72e
@aravinda
‣ DevBots Hackathon lu.ma/qxc4tlid
@ananyavasagiri @araghupathy_
‣ Swing for AI Golf Event lu.ma/5wofqaz9
@PaulFangBayArea
‣ Building AI lu.ma/BuildingAINov
@suffiyanmalikk
1
2
4
2,921