
『東京ロボティクス株式会社』公式アカウントです。商品やサービスなど、様々な情報をお届けします。お問い合わせはHPからお願いいたします。
Joined August 2021
- Tweets 114
- Following 11
- Followers 1,372
- Likes 32
48 Photos and videos










Pinned Tweet

25 Jun 2025
【採用ページを公開しました】
ヒューマノイドロボット開発関連のエンジニア(機械、電気、ソフト)を募集しております。
是非ご応募下さい!
採用ページ:robotics.tokyo/ja/career/
#採用 #インターン
2
8
38
9,801
Apr 2
現在、全身ヒューマノイドを開発中です。今後はハード・ソフト両面で動作の安定性を向上させるとともに、自律作業AIを実装していきます。
ヒューマノイドの全身制御に携わるエンジニアを積極的に募集していますので、最先端のロボットモーションを開発・実装したい方は、ぜひご応募ください。
16
230
865
119,062
Jan 23
当社がBEYOND AWARD 2026(企業部門)を受賞しました。
Jan 22

【発表】境界を越える力が、未来をつくる。「BEYOND AWARD 2026」受賞者・企業が決定
businessinsider.jp/article/2…
8
3,280
16 Oct 2025
当社は今年の7月1日をもって株式会社安川電機の完全子会社となりました。
安川電機のモータ技術と当社の先端ロボット技術を融合し、二足歩行ロボットを中心とした世界最高水準の国産ヒューマノイドを構築します。
優秀な人材も続々と集結してきていますので、我こそはと思う方は是非ご応募ください。
68
342
31,590
東京ロボティクス株式会社 retweeted

8 Sep 2025
東京ロボティクス 坂本義弘 さんが主催する
ロボティクススタートアップ会議2025のレポートを書きました。
note.com/kmoriyama/n/nd2ff0e…
とりあえず、各社プレゼン部分まで。
パネルディスカッション部分も書くつもりです。
が、いつになるかわからないので
とりあえずここまでで公開。
ご覧くだされば幸いです。
4
8
7,123
1 Sep 2025
明日、「ロボティクススタートアップ会議2025」を開催します。是非ご参加ください。
時間:9/2(火)16:30-18:30
形式:ハイブリッド
場所:RSJ2025(東京科学大学)O-b室
詳細・申込:rsj-rsc2025.peatix.com/
※オンライン参加の場合もリンクから参加申込となります。
5
15
3,507
27 Jun 2025
新型ToroboHandによる物体操作デモの映像を公開しました。
NVIDIA社のIsaacSimでの大規模並列強化学習により、追加学習なしでMuJoCo及び実機での物体操作が可能になります!
1
7
76
6,399
27 Jun 2025
東京ロボティクスではヒューマノイドロボット開発関連のエンジニア(機械、電気、ソフト)を募集しております。 是非ご応募下さい!
採用ページ:robotics.tokyo/ja/career/
1
2
3
2,539
27 Jun 2025
This is a demonstration video of in-hand object rotation with new Torobo Hand.
By leveraging large-scale parallel reinforcement learning in NVIDIA Isaac Sim, the learned policy can perform object manipulation in MuJoCo and on the real robot without any additional training.
1
15
96
10,842
東京ロボティクス株式会社 retweeted
25 Jun 2025
RP
激動の海外のヒューマノイド事情 置いてけぼりになった日本が取るべき戦略は? |Seizo Trend sbbit.jp/article/st/166844 #sbbit
ロンドンで行われた「Humanoids Summit」に参加した、東京ロボティクス @Tokyo_Robotics CEOの坂本さん に話を伺いました
19
32
8,308
5 Jun 2025
【東ロボのひとコマ】
滋賀県大津市立真野中学校の生徒の皆さんが、修学旅行の一環で弊社にご来社くださいました。
弊社のToroboに実際に触れていただき、ロボット技術やロボットとの将来について関心を示していただきました。今回の訪問が有意義な経験となっていれば幸いです。
#東京ロボティクス


2
14
1,920
28 Mar 2025
RT @yamagiwa001: ロボット議連の会長に就任致しました。
ロボット産業は、新たな日本のイノベーションの柱となるだけでなく少子高齢化・人口減対策の切り札にもなります。
しっかりと政治としての支援を行ってゆきたいと思います。
#山際大志郎
#ロボット
#新産業…
8
東京ロボティクス株式会社 retweeted

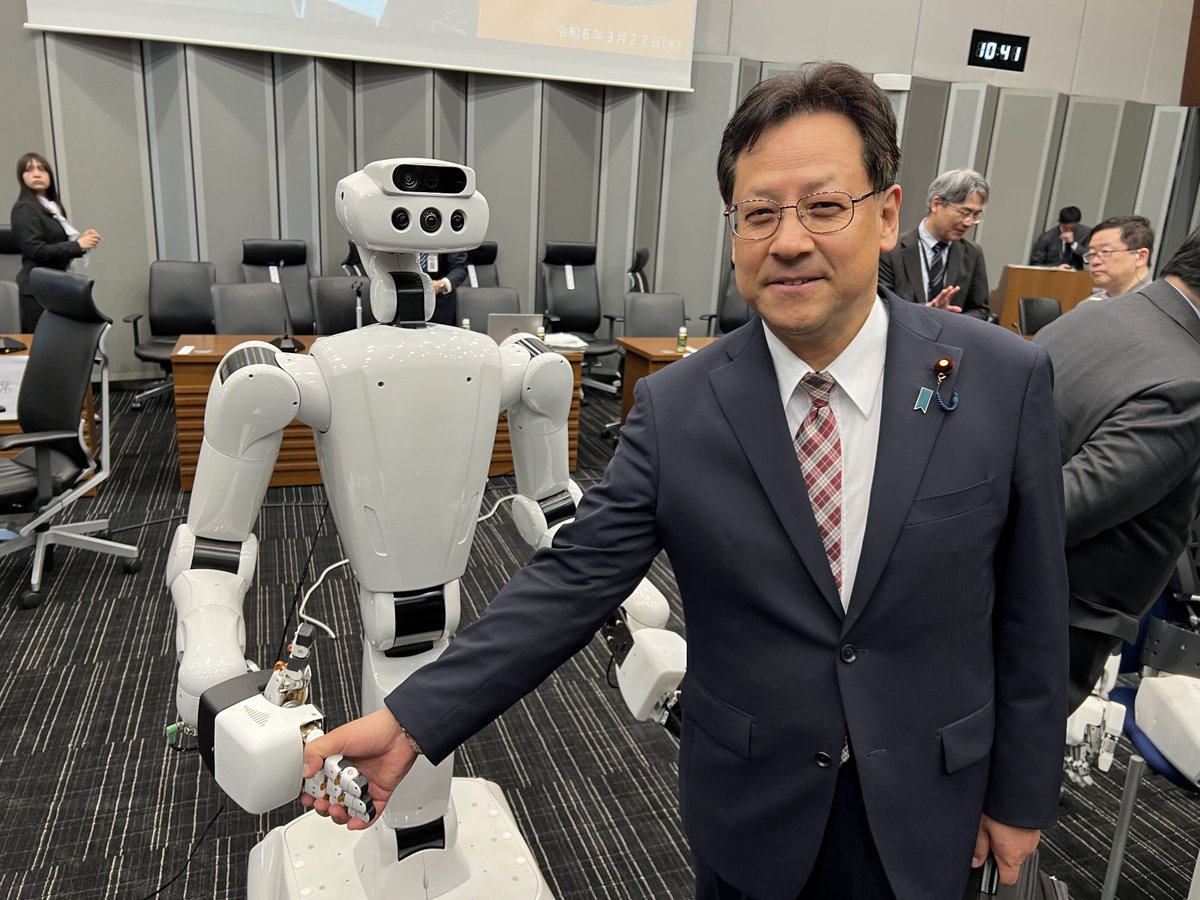
27 Mar 2025
自民党 『ロボット推進議員連盟』の発足式、参画しました🤗
本日は川崎重工業の二足歩行型ロボ、東京ロボティクスの車式人型ロボットのデモがありました。
人型ロボットの活躍で、労働力不足の対策を練ろう‼️
アメリカ🇺🇸・中国🇨🇳等々は、先駆けていますね。
さぁ、しっかり勝って行こう🌸🍀
3
9
47
3,082
東京ロボティクス株式会社 retweeted

27 Mar 2025
27日、ロボット議員連盟が発足👍人手不足で今後ニーズが更に増加することが見込まれる介護等のサービスロボット。製造業などで使われる産業用ロボットは65%のシェアがありますが、サービスロボットの日本のシェアは十数%で中国や米国に遅れをとっています。そこで、「ロボット王国日本の復活」に向けて、更にサービスロボットはAI開発やデータ戦略にも大きく関わることから、それらの取組を進めます。私も役員をさせていただく予定です。
東京証券取引所で行われた、高校生の起業体験プログラム発表会で来賓挨拶。地元からは鳥羽高校が参加してくれていました。
事務局長をつとめるアジア・ゼロエミッション共同体(AZEC)議員連盟では、国際エネルギー機関(IEA)のビロル事務局長から、エネルギー需要が増大する東南アジア地域のエネルギー情勢や、トランプ政権が世界のエネルギー政策に与えるインパクトなどについて講演をいただく。ビロル氏は、石破総理との面談、柏崎刈羽原発視察もされるそうです。
夕方は、事務局長代理をつとめる宇宙・海洋戦略小委員会出席後、小林鷹之さんが座長をつとめる「2050研究会」に出席。伊吹文明元衆議院議長から政治家としての立ち振る舞いなどについてご講義いただく。
その後、事務局長をつとめるデジタル社会推進本部で建設業のDXやそれを活用した障害者の建設業での就業(建福連携)について実践されている企業からヒアリング。
朝一は、スタートアップ政策の進捗確認と今後の成長戦略への盛り込みについて議論する幹部会に出席。夏の骨太の方針や、年末の税制改正の議論などに向けてしっかり取り組んでまいります。
昼は、本会議と安全保障委員会に出席。



11
21
91
5,220
東京ロボティクス株式会社 retweeted

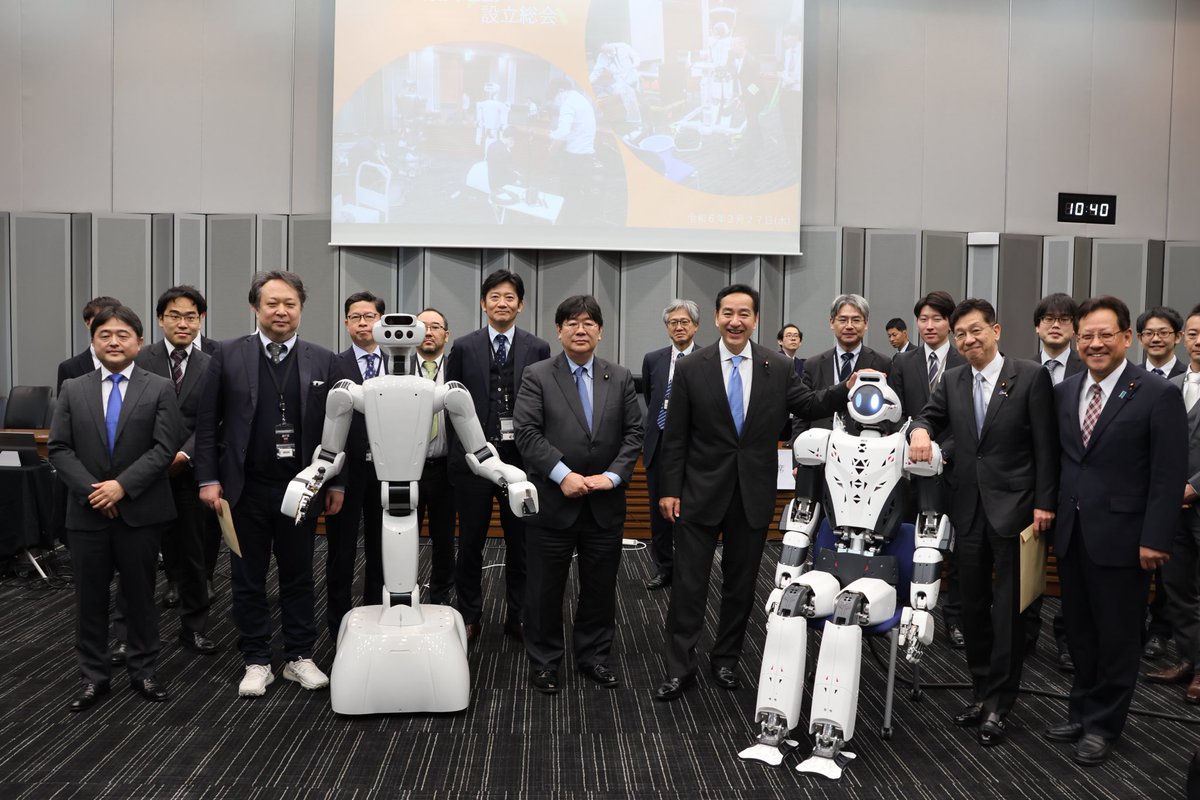
27 Mar 2025
本日3月27日、新ロボット議員連盟が参議院議員会館にて設立総会。川崎重工の「カレイド」、東京ロボティックスの「トロボ」のデモ実演。(両機とも挙動がキュート!)言い出しっぺである私は議連の事務局長として新しい議連を準備してして来ました。
2015年から10年間も更新されていいない日本のロボット戦略。これをアップデートしていくのが新しい議連の目的です。少子高齢化、人手不足の現場などに具体的にロボットを展開していきます。日本のロボット産業を支援して、国際競争力向上、人材確保と育成、創出環境整備、規制制度の見直し、技術支援などを行なっていきます。


16
242
530
60,604
東京ロボティクス株式会社 retweeted

21 Feb 2025
Explore a future where humans and robots work hand-in-hand 🤖🤝! Torobo, a humanoid robot from @Tokyo_Robotics, carries cardboard, saws wood 🪚, and more. The goal: let robots do labor so humans can focus on intelligence and creativity. robotics.tokyo/
#InnovationJapan
2
8
37
5,390

Explore a future where humans and robots work hand-in-hand 🤖🤝! Torobo, a humanoid robot from @Tokyo_Robotics, carries cardboard, saws wood 🪚, and more. The goal: let robots do labor so humans can focus on intelligence and creativity. robotics.tokyo/
#InnovationJapan
7
5
38
7,338