
Robotics & Agents. Previously @Harvard @CarnegieMellon
Joined April 2022
- Tweets 49
- Following 748
- Followers 539
- Likes 258
9 Photos and videos




Gao Jiawei retweeted

Excited to share our CVPR work: SIMPACT: Simulation-Enabled Action Planning using Vision-Language Models, 11:45 PM – 1:45 PM at ExHall F 611
simpact-bot.github.io/
How can we make VLMs plan robotic manipulation actions with grounded physical reasoning?
5
11
47
16,529

Feb 8
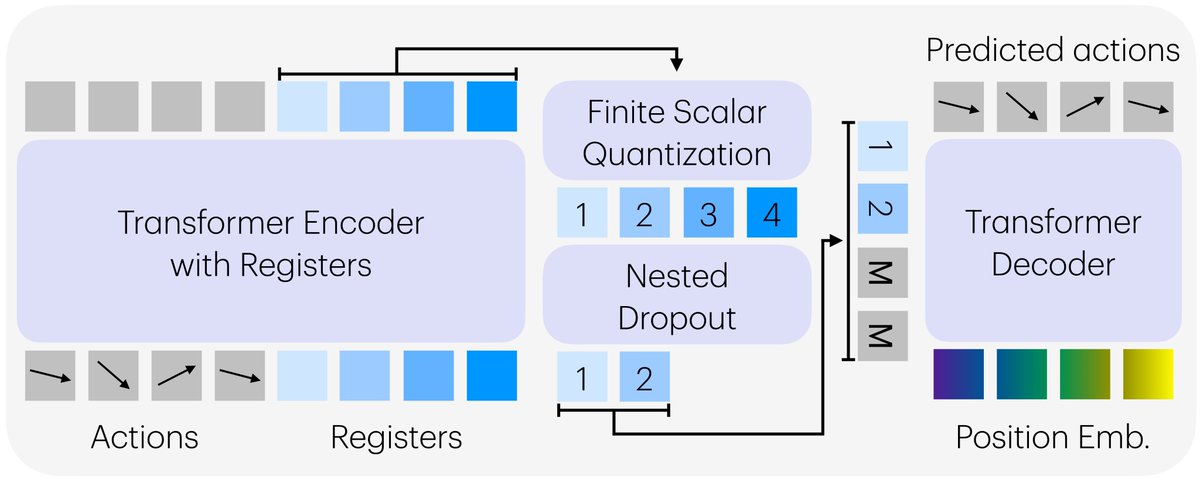
Check out our new work on an interesting action tokenizer design! ordered-action-tokenization.…
Chaoqi's insightful post is definitely worth reading.

4
31
258
23,483
3 Dec 2025
This matches my intuition! Check out this work on scientifically and systematically understanding Flow Policies vs. Regression Policies in Robotics!
3 Dec 2025

Generative models (diffusion/flow) are taking over robotics 🤖. But do we really need to model the full action distribution to control a robot?
We suspected the success of Generative Control Policies (GCPs) might be "Much Ado About Noising."
We rigorously tested the myths. 🧵👇
12
3,972
20 Nov 2025
Just reconstructed a 3D model of Porcelain Tower of Nanjing(南京大報恩寺琉璃塔) using SAM 3D. The tower was burned down in 1856, which means it would in no way exist in the training data.
The result is CRAZY.
12
1,124
14 Oct 2025
It would be really exciting if someone could build on this work for humanoid robots! Original code at github.com/Winston-Gu/CooHOI
21 Oct 2024

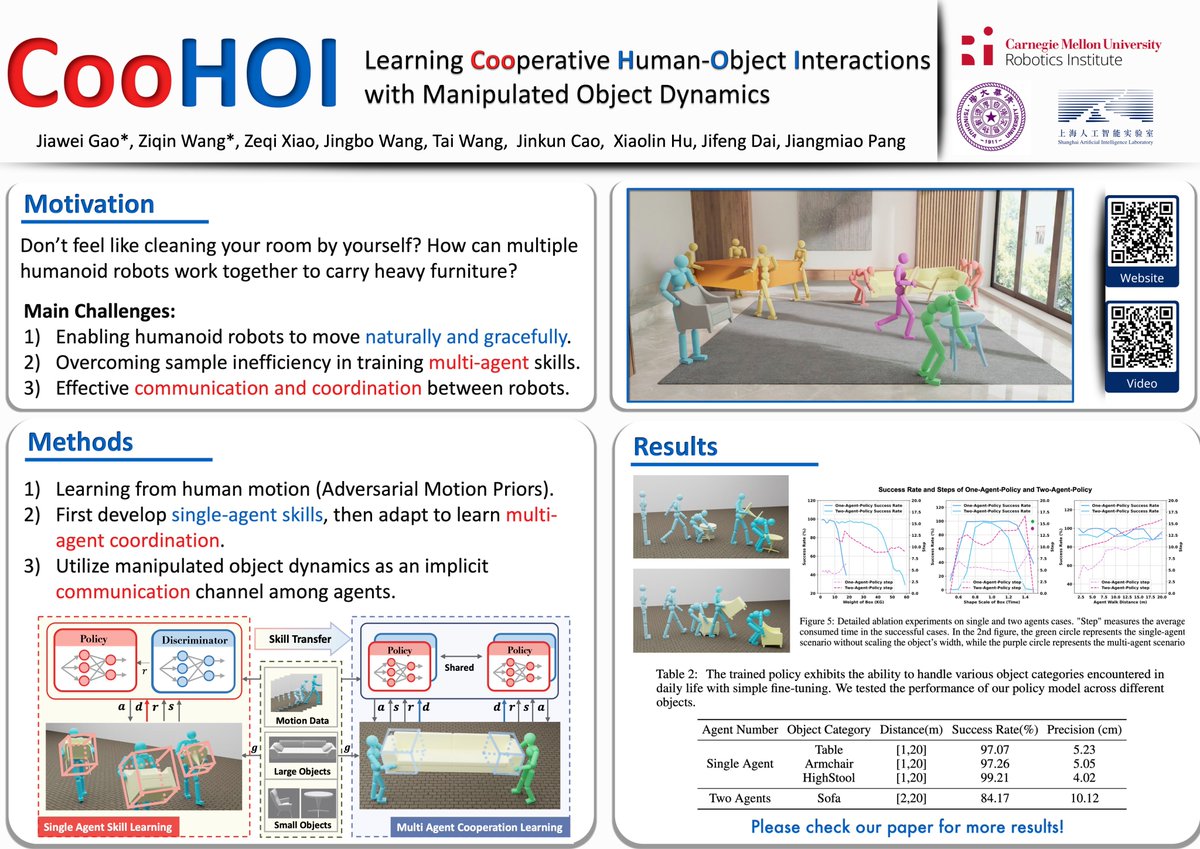
Imagine a future where you can ask humanoid robots to clean your room, but some items, like heavy sofas, are too challenging for just one robot to move.
Introducing CooHOI, a learning-based framework designed for the cooperative transportation of objects by multiple humanoid robots. 🤖🤼🤖
Our work has been accepted as Spotlight at NeurIPS 2024. Website: gao-jiawei.com/Research/CooH…
4
4
42
7,331
16 Jun 2025
Learned a lot from this insightful post! Really hope there will be more posts like this in the community.
13 Jun 2025

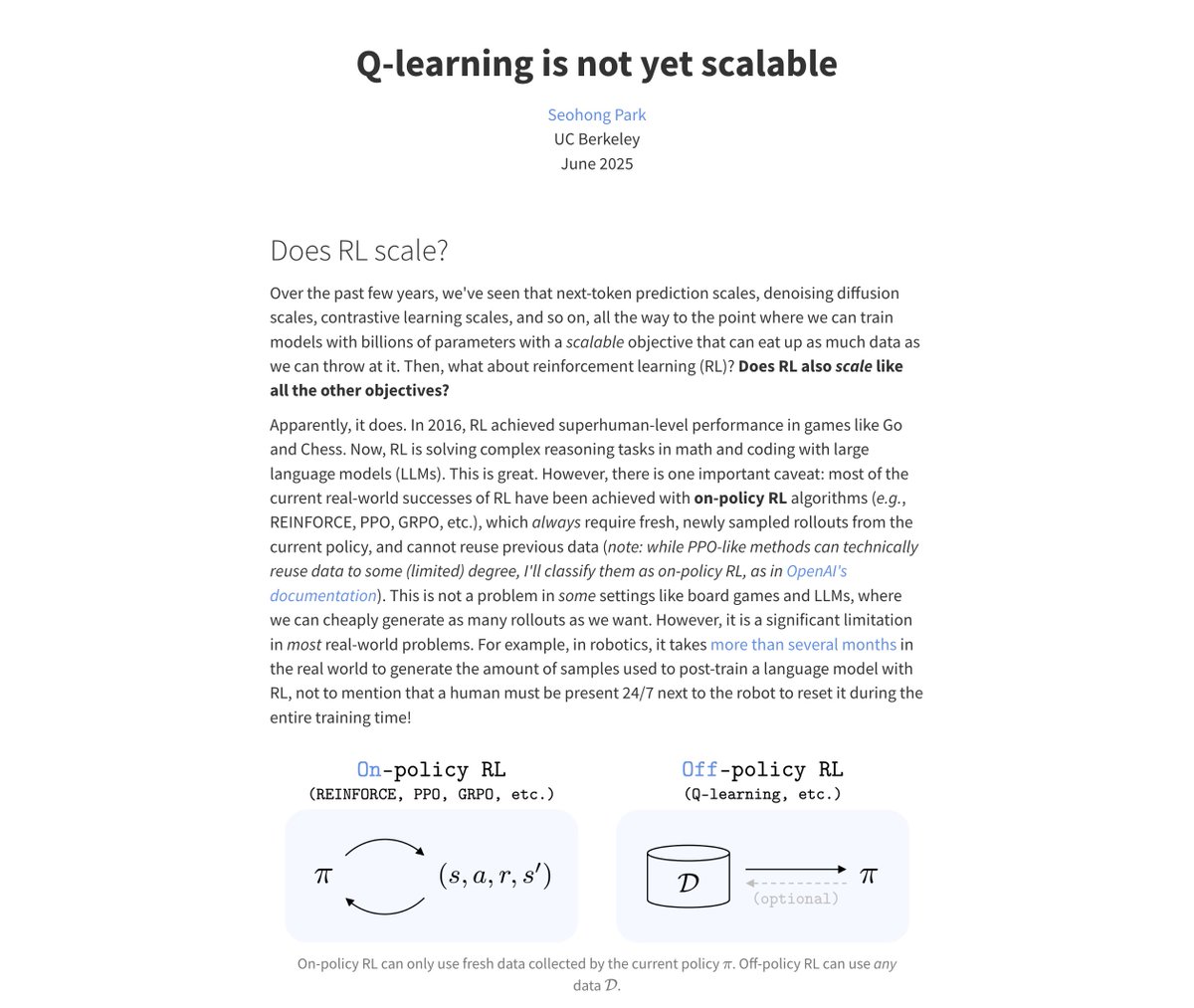
Q-learning is not yet scalable
seohong.me/blog/q-learning-i…
I wrote a blog post about my thoughts on scalable RL algorithms.
To be clear, I'm still highly optimistic about off-policy RL and Q-learning! I just think we haven't found the right solution yet (the post discusses why).
12
1,806
4 Feb 2025
HumanoidVerse, a framework that supports humanoid robot learning across multiple simulators. With its elegant design philosophy, we can easily incorporate new tasks, algorithms, and simulators with minimal effort!
4 Feb 2025

ASAP (github.com/LeCAR-Lab/ASAP) builds upon a new multi-simulator humanoid learning infra HumnaoidVerse: github.com/LeCAR-Lab/Humanoi…
1
4
10
3,015
4 Feb 2025
Check out our latest work on enabling agile whole-body motions for humanoid robots!
4 Feb 2025
🚀 Can we make a humanoid move like Cristiano Ronaldo, LeBron James and Kobe Byrant?
YES!
🤖 Introducing ASAP: Aligning Simulation and Real-World Physics for Learning Agile Humanoid Whole-Body Skills
Website: agile.human2humanoid.com/
Code: github.com/LeCAR-Lab/ASAP
6
1,181
Gao Jiawei retweeted

14 Dec 2024
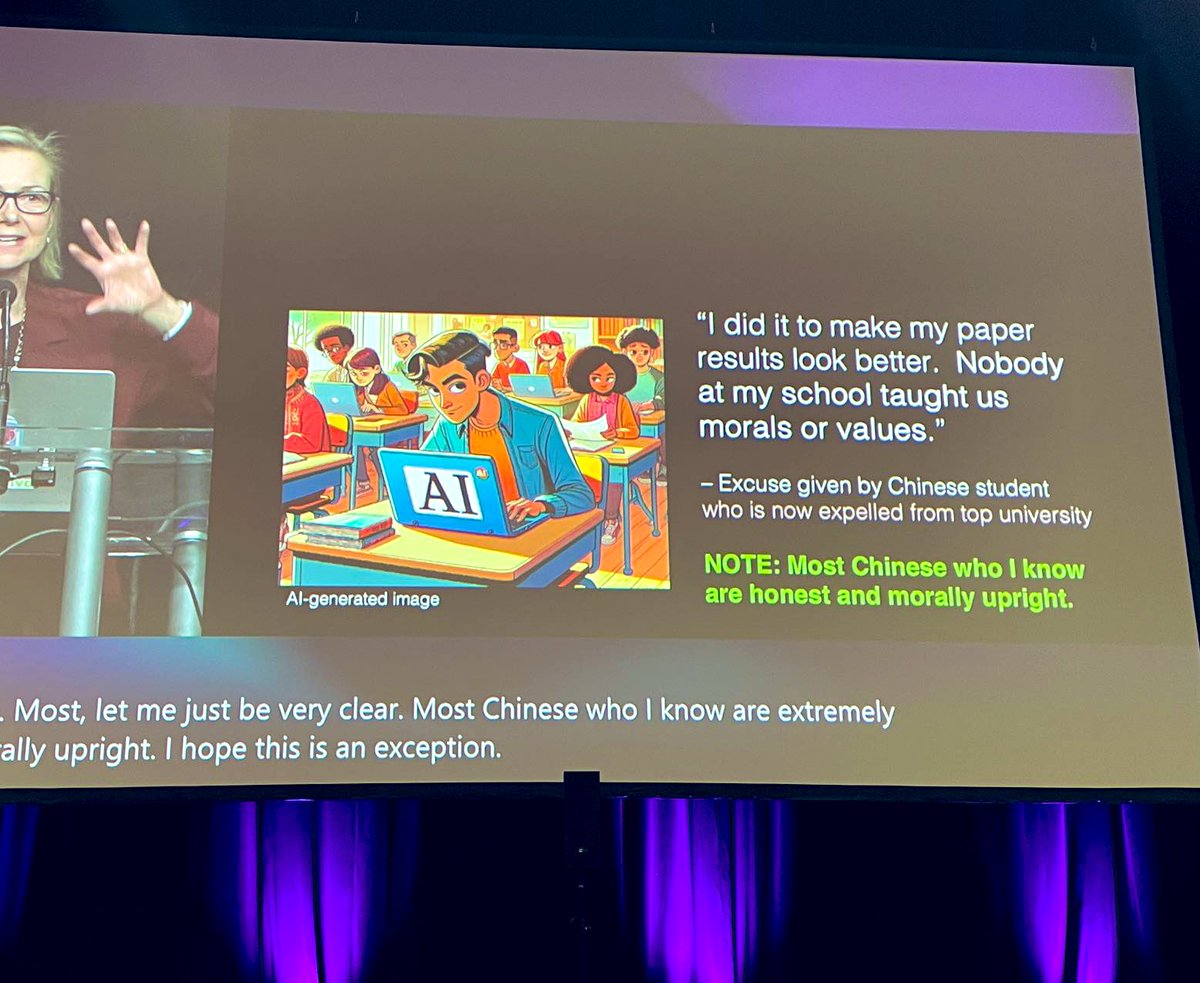
Mitigating racial bias from LLMs is a lot easier than removing it from humans!
Can’t believe this happened at the best AI conference @NeurIPSConf
We have ethical reviews for authors, but missed it for invited speakers? 😡
175
772
3,716
2,222,239
11 Dec 2024
Will be present CooHOI at Thu, 11 a.m. PST — 2 p.m. PST, at East Exhibit Hall A-C #1601. Drop by if you wanna chat!
21 Oct 2024
Imagine a future where you can ask humanoid robots to clean your room, but some items, like heavy sofas, are too challenging for just one robot to move.
Introducing CooHOI, a learning-based framework designed for the cooperative transportation of objects by multiple humanoid robots. 🤖🤼🤖
Our work has been accepted as Spotlight at NeurIPS 2024. Website: gao-jiawei.com/Research/CooH…
6
1,559
21 Oct 2024
Imagine a future where you can ask humanoid robots to clean your room, but some items, like heavy sofas, are too challenging for just one robot to move.
Introducing CooHOI, a learning-based framework designed for the cooperative transportation of objects by multiple humanoid robots. 🤖🤼🤖
Our work has been accepted as Spotlight at NeurIPS 2024. Website: gao-jiawei.com/Research/CooH…
10
64
341
61,459
21 Oct 2024
3/4) Our framework allows humanoid characters to handle a wide variety of objects, with the ability to scale the number of agents from 1 to 2, 4, and even more! For more details, visit our website and paper: gao-jiawei.com/Research/CooH…
1
13
11,543
21 Oct 2024
11
1,522
Gao Jiawei retweeted

20 Dec 2023
Seeking a policy that can empower your robot to traverse any terrain?
Our Hybrid Internal Model achieves this easily and only costs 1 hour.
Key Insight: Estimating environmental dynamics with the robot's response.
ArXiv: arxiv.org/abs/2312.11460
Code: github.com/OpenRobotLab/HIML…
1
21
110
14,078
22 Sep 2023
Excited to announce that our paper concerning **state-adaptive improvement-constraint balances for offline-to-online RL** has been accepted as spotlight at #NeurIPS2023! Grateful to my coauthors and advisors for their invaluable support!
1
5
927
22 Sep 2023
Taking part in this project has been a valuable learning experience for me as it marks my first foray into research field!
448