
"It's dangerous to go alone! Take this."
Joined February 2024
- Tweets 31
- Following 63
- Followers 3,330
- Likes 147
Photos and videos
Lagrange Point retweeted

Jun 3
I AM COMING to BENGALURU this weekend!
Thanks to @_lagrangepoint for sponsoring my trip ;)
i am a research engineer who works on ml inference and hw/sw codesign.
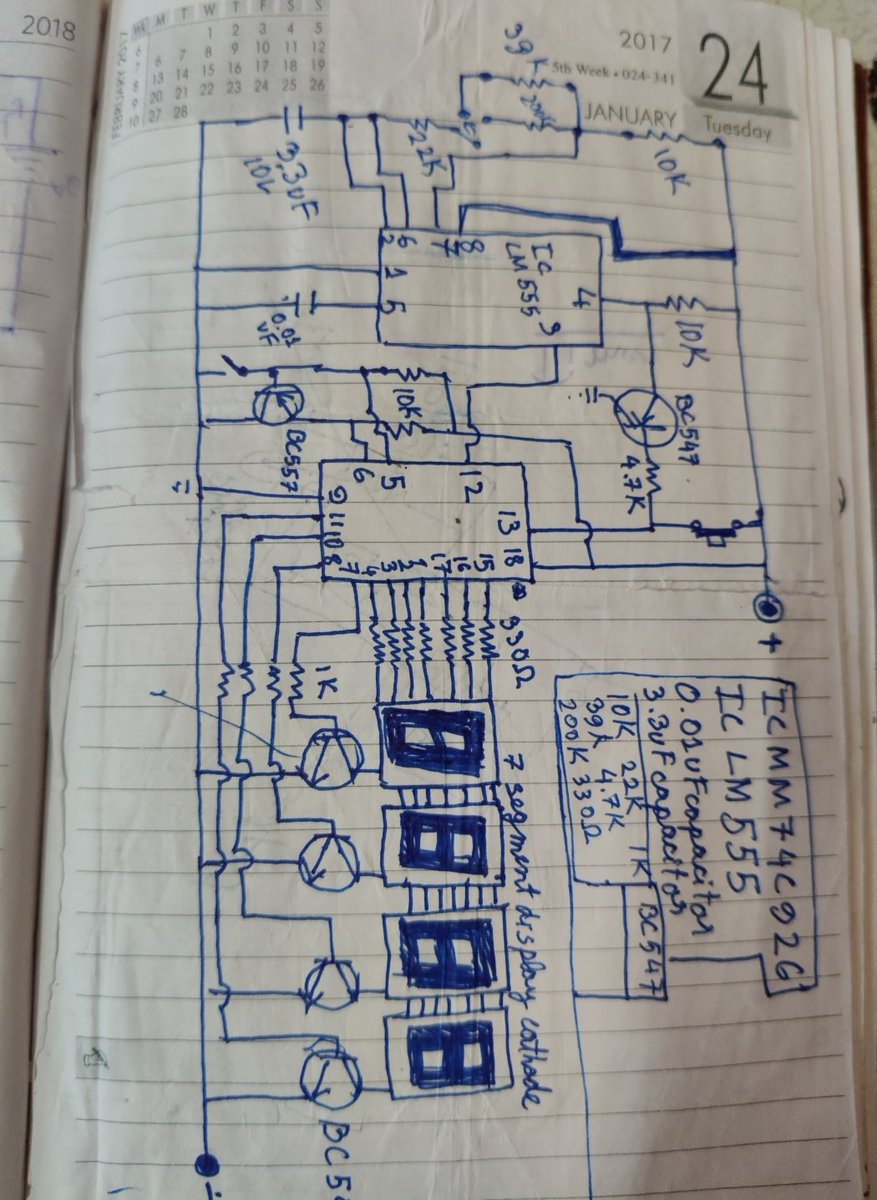
p.s. take a glimpse of the stuff I was into when I was 10 years old in 2017
hi new people, let's meet!
14
4
116
5,812
Lagrange Point retweeted

Jun 1
If you're NOT in Bangalore and working on the public good on any of our favorite problem areas, come to Bangerlore
We at @_lagrangepoint will help with flights and accommodation, and help you meet fellow practitioners. Just DM me!
- urban quality of life / civic tech
- food toxicity
- deep tech talent
If you know someone that fits, send them my way, and I will gift you some really nice socks
May 23

if you’re new to bangalore looking to make some friends, evaluating moving soon or just looking for an excuse to visit - make it around 6th june and come meet 250 of us oneshot. drop your emails for an invite please and TY
bangerlore dot com
(regulars are hereby notified)
25
37
221
63,796
Join us this weekend!
Jun 1

If you're NOT in Bangalore and working on the public good on any of our favorite problem areas, come to Bangerlore
We at @_lagrangepoint will help with flights and accommodation, and help you meet fellow practitioners. Just DM me!
- urban quality of life / civic tech
- food toxicity
- deep tech talent
If you know someone that fits, send them my way, and I will gift you some really nice socks
4
14
2,270
Lagrange Point retweeted

May 18
Hiring IC level computer engineers with an interest in building large scale, dynamic scrapers that work autonomously.
In person @ indiranagar, Bangalore.
(IC - someone confident to the point of being the authoritative say in the team. Not bothered by age / exp)
16
14
108
34,202
Lagrange Point retweeted
May 15
Today at @_lagrangepoint:
A friend got wind that a young founder is building rockets using solid fuel boosters
She then rushes at peak hour through Bangalore traffic to visit and warn him against going down that dark path
Cue rocketry gore from the last century of building rockets and "are you sure you have the safety protocol down"
2
2
62
4,547
Lagrange Point retweeted

Apr 30
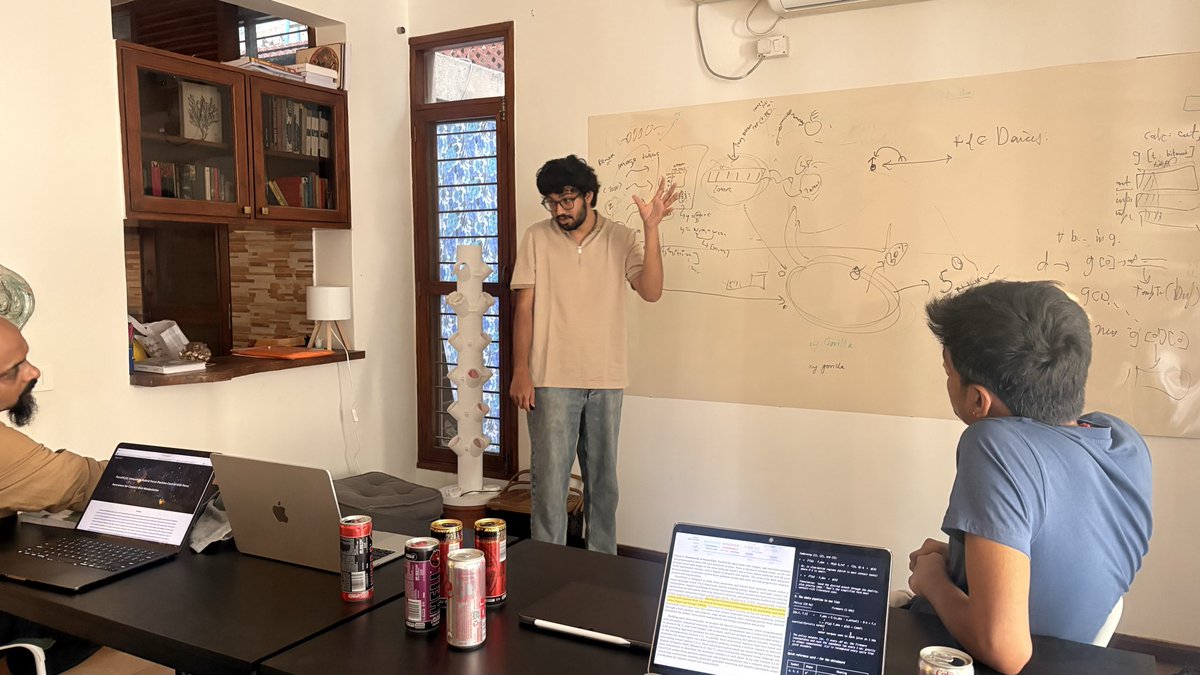
session went well, was fun to whiteboard with people again after a while. thanks @itsarnavb and @_lagrangepoint for hosting us, and everyone who joined. you’re og
quick summary of what we talked about:
started by sketching a crude version of how we’d integrate force as a modality ourselves. image tokenised through ViT, proprio, and text encoded into a pretrained VLM, latent flowing into an action head in the same policy. also talked about action chunking on the decoder helping with inference latency and temporal coherence within a chunk, though long chunks risk drifting from the world
then started picking apart the paper. the action head is actually a separate altered transformer that ingests numerical force as input and outputs (delta_p, f), directly fed into the robot’s impedance controller which converts to motor torque and makes the arm respond to feedback. different from the usual IK-based position controller logic
discussed that the improvement over pi0 might have come from the model being steered to produce a force vector as output, not the MoE in the action head. paper doesn’t show with/without MoE ablations so can’t say
also briefly touched on interrupts for robots. training time we feed deliberately bad demos and recover. inference time we use DAgger and add a human intervention label and retrain. model has no internal knowledge of whether data came from human intervention or general teleop
some questions that branched off from our discussion:
- apart from force, what other modalities of input and feedback would make action policies more aware and accurate?
- slow and fast moving policies and how they get baked together at high frequency of operation?
- flow inpainting as an inference time optimisation for cloud based vlas? (under explored)

Apr 26

planning to host a few people for a paper reading session in Indiranagar on 30th April. the discussion will be anchored around contact rich manipulation. we’ll mostly discuss the recent ForceVLA2 paper, but I’ll curate a few more reading resources around it.
keeping the first one small. looking for 4-5 engineers/researchers comfortable with transformer internals, flow matching/diffusion math, and recent VLA architectures(pi 0.5,0.7). would be awesome if we can get anyone who also has experience with contact dynamics
lunch is on me :P
1
4
48
6,044
Lagrange Point retweeted

Mar 18
it was great to host an incredible group of folks at the @AltCarbonIndia office, brought together by their curiosity and shared interest in frontier science advancement.
what better place to do it than @iiscbangalore-- an institution built by JN Tata, a man who believed that India's most urgent need wasn't more capital — it was more science.
pleasure to host friends from @ARIA_research @lossfunk @_lagrangepoint @AccelIndia @karya_inc
check out ARIA's call for program directors here: aria.org.uk/about-aria/our-t…
also check out the new AI Scientist Conference that @paraschopra spoke about at the event: caisc2026.github.io/
for those asking, here's the reading list we started the evening with: notion.so/ARIA-x-Alt-Carbon-…


2
5
45
3,521
Lagrange Point retweeted
Mar 12
HEY! I'm hosting a panel on accelerating deep tech and manufacturing in India 🇮🇳 at IISc
This Tuesday I'm at @AltCarbonIndia HQ alongside @ARIA_research
ARIA is the UK government agency that enables high-risk research and moonshot projects. They're on a mission in India to support and invest in the frontier.
If that's you, DM me!
Looking forward to seeing familiar and new faces!
Many thanks to team Alt Carbon! @adadithya @ananyabananyaa @SparshAgarwall
6
12
118
11,358
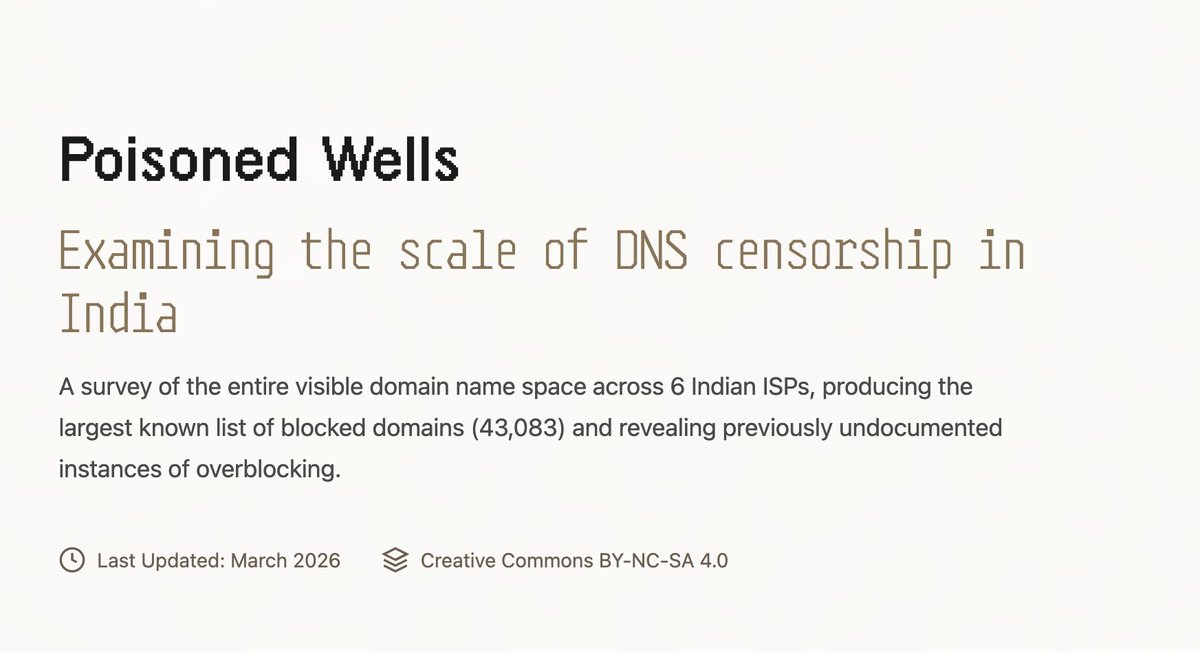
Karan has done some incredible work on uncovering the scale of DNS censorship in India!
Mar 2

Excited to share “Poisoned Wells,” which presents the largest point-in-time study of website blocking in India to date. I tested the blocking of 294 million apex domains across six Indian ISPs, sending 1.76 billion DNS queries in total.
3
30
2,794
Lagrange Point retweeted
28 Nov 2025
If you enjoy obsessively figuring out how protocols, APIs, and machines work under the hood, DM me with your past work
You'll work alongside some *excellent* collaborators at @_lagrangepoint over a retreat

5
9
106
12,051
Lagrange Point retweeted

22 Nov 2025
Aspera Industries was born from a frustration and a single lingering question: why are airplanes not built in India? 🧵
Grateful to @RahulSanghi1 and @AaryamanVir for helping me bring a voice to this mission. Link to the full piece below!
15
37
296
77,456

16 Jul 2025
15 Jul 2025

5/ Khushi Mittal @khushhhi_ is working to manufacture autonomous, medium-sized cargo aircraft in India, with the long-term goal of launching the world's first autonomous airline. observv.co/
Over the next six weeks, she will be developing the flight stack for a technical demonstrator, which involves retrofitting an existing aircraft with autonomous controls.
1
2
21
5,119
19 May 2025
Lagrange Point stands for the discovery of great talent in India
Introducing @quest_sh by Lagrangians @shruthibadri and @itsarnavb
18 May 2025
In India 🇮🇳, students in colleges prepare to enter the real world by doing fake things:
- meaningless resume padding projects
- endless interview prep
- placement politics
We can do better. Introducing @quest_sh:
A set of hard but tractable *real world* problems you can solve to prove your mettle

ALT Introducing Quest!
3
28
8,062
Lagrange Point retweeted
10 May 2025
Hey! We're meeting Sunday (tomorrow) at 3 PM to talk about education and alternate career paths over coffee and croissants
Looking to talk to high school and college students (and drop outs!)
If that's your thing, please reply or DM me, @khushhhi_ or @shruthibadri!
8 May 2025

if you're going to be in hyderabad this weekend, please dm me or @itsarnavb !
planning to host a small gathering of folks in high school and university to talk about education and deep tech

5
24
6,374
Lagrange Point retweeted
24 Apr 2025
I’m launching a project with @shruthibadri
We’re addressing issues deeply personal to us: education, early career paths, technical talent, and neurodiversity in India 🇮🇳
Hosting an event in Bangalore this Sunday.
We’re looking to talk to students thinking about questions of career, and show what we’re building
DMs open! 💌

18
25
218
29,151
Lagrange Point retweeted

8 Apr 2025
Looking for folks with Parkinson's or other motor disabilities to test and iterate on clothing adaptations I designed!
Intend to make it possible to dress again with dignity.
Please DM/share with anyone who might benefit from this!
Protos are ready, just need more feedback.

3
14
54
6,487
Lagrange Point retweeted

1 Apr 2025
Cool project from @matreja @pasricha_sehaj and others at @_lagrangepoint:
- Get hyperlocal AQI data
- Analyze if AQI is correlated with home prices
30 Mar 2025
AQI has been a pressing issue in India but we only seemed to obssess over it after @bryan_johnson walked out of the podcast with @nikhilkamathcio
@Nithin0dha talked about how AQI should be corelated to factors like real estate prices.
We at @_lagrangepoint wanted to verify this.
1
3
33
10,680
Lagrange Point retweeted
30 Mar 2025
AQI has been a pressing issue in India but we only seemed to obssess over it after @bryan_johnson walked out of the podcast with @nikhilkamathcio
@Nithin0dha talked about how AQI should be corelated to factors like real estate prices.
We at @_lagrangepoint wanted to verify this.
25
64
911
121,009
Lagrange Point retweeted
26 Mar 2025
Members of @_lagrangepoint are looking for a 2/3 room flat in Koramangala. I appreciate leads for high quality landlords
You will be hosting young folks who are dedicating themselves to an independent pursuit of science, tech and civic issues
You will not find finer tenants.
5
8
54
6,253
Lagrange Point retweeted

18 Dec 2024
We're starting to release talks at Turing's Dream online!
Rithvik @rithvikvibhut, Arnav @itsarnavb and Rithwik @thel3l "hacked" Airpods using a Faraday cage to unlock geo-locked hearing aids capability (it worked in US, but not in India).
Watch 10 min talk on Youtube 👇

8
17
236
20,932