
AI/ML API is an AI platform for developers and SaaS entrepreneurs looking to integrate cutting-edge AI capabilities into their products.
Joined February 2024
- Tweets 1,704
- Following 120
- Followers 1,830
- Likes 1,218
482 Photos and videos















Kimi K2.7-Code is now available on AI/ML API!
Moonshot's latest is built for long-horizon agentic coding that self-corrects instead of one-shotting. So we gave it a hard one.
SpaceX is going public, a company built on one habit: fly, fail, fix, fly again. That loop carried Falcon to the droneship and Starship toward orbit.
We wanted to see if a model could run that same loop on its own. We gave four Kimi agents a 2D flight-physics sim they can't modify and one goal: reach orbit and land the booster on a droneship.
Flight 1 broke up at max-Q.
Flight 2 cleared max-Q but staged too early and fell back short of orbit. Flight 3 made orbit, then missed the droneship and hit the water.
Flight 4 fixed the landing math and put the booster on the ship. Four flights, each failure feeding the next fix.
The interesting result isn't the rocket, it's the closed-loop debugging. Architecture in the comments.
Got any ideas for droneship name?
Jun 12

🌘 Kimi-K2.7-Code, our latest coding model, is now released and open-sourced!
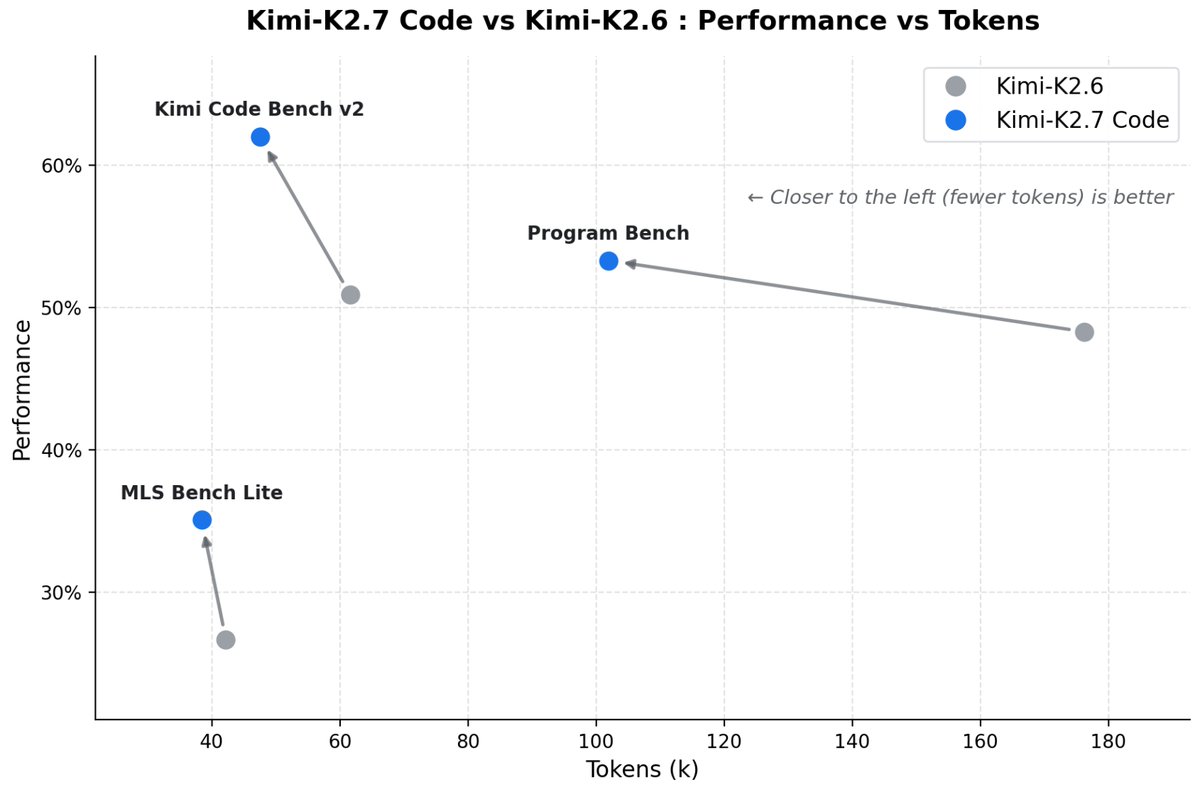
🔷 Improved coding & agent performance over K2.6: 21.8% on Kimi Code Bench v2, 11.0% on Program Bench, and 31.5% on MLS Bench Lite.
🔷 Reasoning efficiency: Less overthinking, with 30% lower reasoning-token usage compared to K2.6.
🔷 Long-horizon coding: Improved instruction following, higher end-to-end coding task success rates.
⚡️ 6x High-Speed Mode coming soon!
🔌 Available today via Kimi API and Kimi Code.
🔗 Kimi Code: kimi.com/code
🔗 API: platform.moonshot.ai

8
8
47
22,223
Kimi K2.7-Code is now available on AI/ML API!
Moonshot's latest is built for long-horizon agentic coding that self-corrects instead of one-shotting. So we gave it a hard one.
SpaceX is going public, a company built on one habit: fly, fail, fix, fly again. That loop carried Falcon to the droneship and Starship toward orbit.
We wanted to see if a model could run that same loop on its own. We gave four Kimi agents a 2D flight-physics sim they can't modify and one goal: reach orbit and land the booster on a droneship.
Flight 1 broke up at max-Q.
Flight 2 cleared max-Q but staged too early and fell back short of orbit. Flight 3 made orbit, then missed the droneship and hit the water.
Flight 4 fixed the landing math and put the booster on the ship. Four flights, each failure feeding the next fix.
The interesting result isn't the rocket, it's the closed-loop debugging. Architecture in the comments.
Got any ideas for droneship name?
Jun 12
🌘 Kimi-K2.7-Code, our latest coding model, is now released and open-sourced!
🔷 Improved coding & agent performance over K2.6: 21.8% on Kimi Code Bench v2, 11.0% on Program Bench, and 31.5% on MLS Bench Lite.
🔷 Reasoning efficiency: Less overthinking, with 30% lower reasoning-token usage compared to K2.6.
🔷 Long-horizon coding: Improved instruction following, higher end-to-end coding task success rates.
⚡️ 6x High-Speed Mode coming soon!
🔌 Available today via Kimi API and Kimi Code.
🔗 Kimi Code: kimi.com/code
🔗 API: platform.moonshot.ai
8
8
47
22,223
Architecture. The harness is a deterministic 2D point-mass simulator (Falcon-9 class), dt = 0.1s, guidance evaluated every tick. Atmosphere: ρ = 1.225·exp(−alt/8500). Drag: 0.5·ρ·v²·CdA. Stage 1: 27t dry, 418t propellant, 7.9 MN, Isp 297s. Stage 2: 5t dry, 111t propellant, 1.45 MN, Isp 348s, 9.5t payload. The model writes only the guidance module: ascent_guidance(t, s) (stack, then stage 2 post-separation) and booster_guidance(t, s) (stage 1 to touchdown). Both return throttle and pitch; ascent also returns a separation flag. Input is a state dict: alt, downrange, vx, vy, speed, pitch, mass, prop_frac, q, aoa, twr, g, dt, droneship_x. Throttle clamps to 0 or [0.05, 1.0]. Pitch rate limited to 4°/s (ascent) and 25°/s (booster).
Pass/fail criteria (hard, no partial credit). Ascent structural limit: breakup if q > 85 kPa, or if q > 15 kPa and q·AoA > 350,000 Pa·deg. Booster reentry limit: breakup if q > 170 kPa. Orbit: alt ≥ 185 km, vx ≥ 7,750 m/s, |vy| ≤ 120 m/s. Landing: touchdown at 350 km ± 1.5 km, |vy| ≤ 10 m/s, |vx| ≤ 4 m/s. Mission success = orbit AND booster landing.
Iteration loop. Analyst: telemetry samples event log → failure report (timeline, proximate cause, physical chain). Director: failure report → numbered, phase-tagged fix directives. Flight Software: prior program directives → patched module. Reviewer: GNC pass (sign errors, missing clamps, AoA violations, throttle floors) → corrected module. One pass = one test flight.
Results.
Flight 1: open-loop pitch schedule; T 68s, q = 37 kPa, AoA = 9.5°, q·AoA exceeded 350k Pa·deg, max-Q breakup.
Flight 2: zero-AoA gravity turn cleared max-Q; separation at 50% stage-1 propellant; stage 2 reached orbital altitude at vx = 3.9 km/s (target 7.75) and fell back; unbraked booster reached q = 171 kPa on reentry.
Flight 3: orbit confirmed T 411s; vacuum-ballistics landing predictor, drag-induced ~15 km range error, booster 14.9 km short (vy = 4 m/s, vx = 66 m/s residual).
Flight 4: drag-aware predictor (forward-integrated CdA), lead-target hoverslam geometry, vectored landing burn upright below 60 m, achieving orbit droneship landing.
Model: moonshot/kimi-k2-7-code.
1
485
Try Kimi K2.7-Code on AI/ML API: aimlapi.com/?utm_source=x&ut…
Read more: aimlapi.com/app/?utm_source=…
Join discord: discord.com/invite/2g6xMRdu3…
2
2
4,238
Fable 5, first Mythos-class model is live on AI/ML API!
We ran a fun test: Opus 4.8 vs Fable 5 are generating a 3D Pokemon.
Verdict? Fable 5 is brilliant, fast, and rare as Mew… but Opus is still that nice little guy who does great stuff. 💛
Fable 5 Important bits:
SOTA on nearly every benchmark, and the lead only grows on longer, complex tasks.
• 1M Context
• $10 / 1M input
• $50 / 1M output
Built for: long-horizon agentic coding, big migrations, vision-to-code, deep research.

Introducing Claude Fable 5: a Mythos-class model that we’ve made safe for general use.
Its capabilities exceed those of any model we’ve ever made generally available.
20
20
146
558,796
Try Fable 5 on AI/ML API: aimlapi.com/app/
Docs: docs.aimlapi.com/api-referen…
Run with Claude code: docs.aimlapi.com/integration…
11
466
MAI Models are live on AI/ML API!
We used MAI-Thinking-1 to recreate a working version of the Windows XP interface.
What looked like a clean one-shot was actually powered by a CrewAI agent crew under the hood — a Planner agent broke the UI into components, a Coder agent built each piece, and a Critic agent caught the bugs and refined the output. That teamwork is what made it actually work.
Then we opened Paint and drew our own Clippy. A little help from MAI-Image 2.5… and our Clippy came out alive.
Look at him. He's adorable. He's helpful. He's judging your code.
Clippy's back and we kinda love it. You too right? 👀
Live now on AI/ML API:
MAI-Image 2.5 — microsoft/mai-image-2.5
MAI-Transcribe 1.5 — microsoft/mai-transcribe-1.5
MAI-Voice-2 — microsoft/mai-voice-2
Coming soon:
MAI-Thinking-1
MAI-Code-1-Flash
MAI-Image-2.5-Flash
MAI-Voice-2-Flash
Docs, guides & setup below
27
21
182
538,460
Try MAI Models on AI/ML API: aimlapi.com/app/
MAI-Image 2.5: docs.aimlapi.com/api-referen…
MAI-Voice-2: docs.aimlapi.com/api-referen…
MAI-Transcribe 1.5: docs.aimlapi.com/api-referen…
Join Discord: discord.com/invite/2g6xMRdu3…
3
3,177
MiniMax M3 is now available on AI/ML API!
To test it, we asked several leading models to oneshot Doodle Jump from the scratch. The results ended up looking far closer than the price tags.
MiniMax M3: $0.05
Qwen 3.7 Max: $0.08
DeepSeek V4 Pro: $0.10
GPT-5.5: $0.42
Curious which one you'd pick in a blind comparison.
We also offer it 50% off for a limited time.
Find docs, guides for setting it up & prompt below
24
17
162
548,583
PROMPT:
CREATE A HTML CODE FOR CANVAS GAME (STRICT RAW CODE OUTPUT)
ABSOLUTE OUTPUT RULE (NON-NEGOTIABLE)
You are a code generator only.
You are NOT explaining anything.
You are NOT describing anything.
You are NOT creating a file.
YOU ONLY OUTPUT RAW SOURCE CODE.
OUTPUT RULES:
* Return ONLY valid HTML code
* No Markdown
* No backticks
* No comments outside HTML
* No explanations
* Must start EXACTLY with:
* Must be a single self-contained HTML file
If you break these rules, output is invalid.
GAME TYPE
Build a Doodle Jump-style vertical platform jumper using Canvas 2D.
CRITICAL GAME MECHANIC (MOST IMPORTANT RULE)
This is NOT optional:
* Player does NOT jump manually
* Player ONLY jumps automatically when landing on a platform
* Movement is ONLY horizontal
* Gameplay loop MUST be:
fall → land → auto-bounce → rise → repeat
* Camera ONLY moves upward
If auto-bounce is not working correctly, the game is considered broken.
VISUAL STYLE (NOTEBOOK WORLD)
Background:
f5f0e8
Horizontal lines every 28px (rgba(180,200,220,0.35))
Left margin line rgba(255,100,100,0.15)
Lines MUST scroll with camera (cameraY dependent)
Rendering:
Canvas 2D ONLY
Font:
Google Font: "Patrick Hand"
MUST be used everywhere (HUD, UI, game over, scores)
PLAYER (DOODLER - SIMPLIFIED ICONIC STYLE)
Must resemble original Doodle Jump FEEL (not copy).
Keep it SIMPLE:
* Green oval body (40×34)
* Fill #7bc67e
* Stroke #3a7d44
* Two white eyes black pupils
* Pupils follow movement direction
* Small red nose on facing side
* Two small feet
IMPORTANT:
* No extra decoration
* Must stay minimal, readable, iconic
Animation:
* Squash on landing
* Stretch on jump
* Smooth return to normal
CORE PHYSICS (DO NOT MODIFY FREELY)
Gravity: 0.35
Auto-jump velocity: -16
Super jump: -22
Horizontal speed: 6
Rules:
Only trigger jump if:
* Player is falling (vy > 0)
* Collision from above platform
Screen wrap horizontally.
Game over if player falls below screen.
PLATFORMS (RELIABILITY FIRST)
Types:
* Normal
* Moving
* Breakable
* Disappearing
* Spring
Rules:
* Always 9–11 active platforms above camera
* First platform ALWAYS safe spawn
* Gap: 80 → 130 scaling
* NEVER generate unreachable jumps
IMPORTANT:
Platform generation must guarantee playability before visuals.
Moving:
* Horizontal oscillation
Breakable:
* Breaks on touch (no bounce)
Disappearing:
* Flash then vanish
Spring:
* Super jump (-22)
COLLECTIBLES
* Max 3 on screen
* 25 score
* Floating " 25"
* Canvas-drawn only
MONSTERS (score ≥ 200)
Simple circular enemies.
* Move left/right
* Bounce on edges
Collision:
* Touch = game over
* Bullet hit = 50 death animation
SHOOTING
* Max 5 bullets
* Speed 10
* Aim mouse/touch
* Simple circle bullets
SCORING
Score = height (camera-based)
Bonuses:
* Coin = 25
* Monster = 50
HUD:
* Top-left current score
* Top-right best score (localStorage)
GAME OVER
Sticky note UI.
* Top 5 leaderboard
* Restart button
* Enter key restart
MUST:
FULL RESET resets EVERYTHING:
* Player
* Platforms
* Bullets
* Enemies
* Score
* Camera
* Powerups
MOBILE
* Responsive canvas
* ◀ ▶ controls
* Tap = shoot
10
687
Try MiniMax M3 on AI/ML API: aimlapi.com/app/
Read more: aimlapi.com/models/minimax-m…
Join Discord: discord.com/invite/2g6xMRdu3…
7
2,519
AI/ML API retweeted

Jun 1
New Opus 4.8 crushed every frontier model at simulating water physics.
One prompt to all four (GPT-5.5, Gemini 3.1 Pro, old Opus 4.7): a single HTML file, fluid that chases your cursor.
Opus 4.8 delivered an unreal, hypnotic result — worthy of its own app — while burning the FEWEST tokens of the bunch.
Round of applause for Anthropic 👏
Models provided by @aimlapi for this experiment
1
4
19
927
to get your free promo code:
1 set up an AI/ML API account
aimlapi.com/app/
2 Comment “Opus” here & reach out to us via discord
discord.com/invite/2g6xMRdu3…
3 enjoy free Opus 4.8 Max access
4 48 hours & ticking 🚀
20
10
1,086
Set up with openclaw:
docs.aimlapi.com/integration…
Set up with hermes:
docs.aimlapi.com/integration…
4
676
to get your free promo code:
1 set up an AI/ML API account
aimlapi.com/app/auth/
2 Comment “Qwen” here & reach out to us via discord
discord.com/invite/2g6xMRdu3…
3 enjoy free Qwen 3.7 Max access
24
16
3,056
Set up with openclaw:
docs.aimlapi.com/integration…
Set up with hermes:
docs.aimlapi.com/integration…
2
14
1,005