
Sharing insights on DeFi, Contibutor @axisrobotics & @acepyr
Joined April 2024
- Tweets 2,940
- Following 6,643
- Followers 2,933
- Likes 3,532
452 Photos and videos









🔥 AXIS INDO WEEKLY EVENT LINEUP 🔥
Minggu ini penuh keseruan buat seluruh @AxisRoboticsID
📅 Jadwal Event:
🏃 Selasa | 20.00 WIB
Stumble Guys #3 bersama @Steven9980
Siap lari, lompat, dan bertahan sampai garis akhir!
🎤 Kamis | 20.00 WIB
Karaoke #1 bersama @LimosivBirly
Saatnya tampilkan suara terbaikmu atau santai menikmati lagu favorit.
🏎 Sabtu | 20.00 WIB
SmashKarts #3 bersama @Superaheng
Balapan penuh aksi dan pertarungan seru siap menantimu!
☕ Minggu | 20.00 WIB
Weekly Talks #3
Ngobrol santai, recap perjalanan seminggu, dan seru seruan bareng komunitas.
✨ Bonus:
Setiap partisipasi event akan mendapatkan @axisrobotics Point!
Jangan lupa catat jadwalnya dan nyalakan alarm kalian...!
1
14
AirdropNext (✱,✱) retweeted

Jun 14
Hal menyakitkan saat garap @axisrobotics adalah dengan melihat status "failed" berturut. Auto cidro wak💔😭
50
18
56
299
AirdropNext (✱,✱) retweeted

Jun 17
Physical AI needs experience.
Experience needs data.
Data needs infrastructure.
@AxisRoboticsAI

45
20
48
325
Just followed instagram @axisrobotics ...! 🔥
Love seeing the journey unfold through quick updates, community moments, and behind the scenes insights.
Looking forward to seeing more of what the Axis team is building....!
Jun 17

If you haven't followed Axis on Instagram yet, now is the best time!
Our IG is where we share quick, vibrant bites of our progress, community events, and behind-the-scenes moments.
It's the best way to catch up, understand what we're building, and dive deeper into the Axis stack—fast.
Follow us here 👇 instagram.com/axisrobotics_o…

1
8
AirdropNext (✱,✱) retweeted

Jun 12
Is it just me, or are the robots at @axisrobotics starting to develop a very specific sense of humor? My current task is to 'Put the Rolling Pin on the Dough Ball.' But howw 😂
This simulation feels like a prank. Just a robot prank, bro! Touche, brader.

50
16
54
346

Jun 16
This is bigger than robotics.
Making Physical AI training accessible to anyone means more builders, faster innovation & truly open ecosystem
the combination of simulation onchain infrastructure is unlocking a new era.
@axisrobotics @base = 🤖
Jun 16
Physical AI onchain isn't just exciting—it’s accessible to everyone. 🦾
Huge thanks to @baseapac for the feature at SuperAI! We showed that simulation is no longer locked behind expensive rigs.
Zero special hardware needed. Anyone can train real robots directly on @base today.


1
1
12
AirdropNext (✱,✱) retweeted

Jun 15
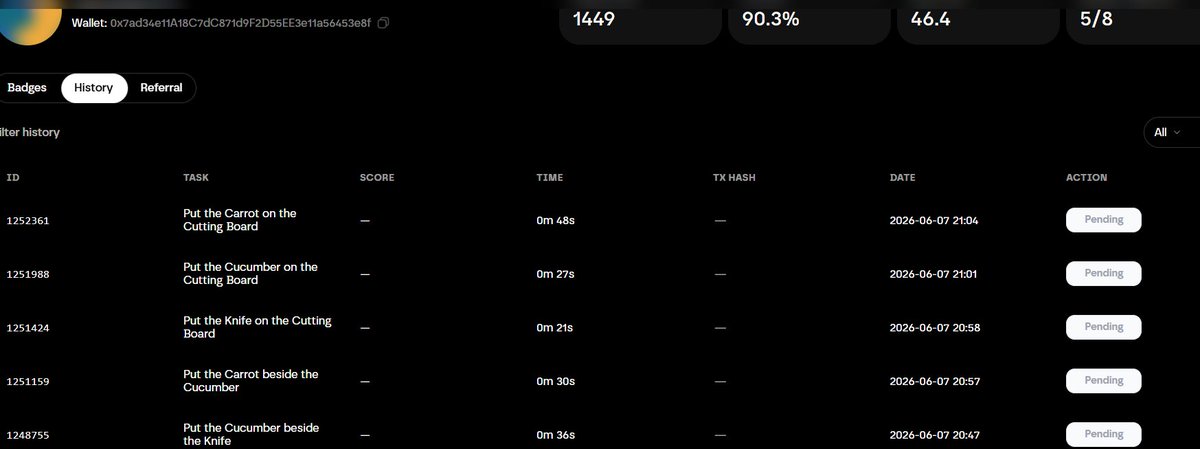
Hari demi hari, tugas demi tugas akhir aku telah menyelesaikan 600 task di @axisrobotics .
Mungkin 600 data trajectory terlalu sedikit dibandingkan dengan kebutuhan physical AI saat inil, tapi aku senang menjadi bagian dari perjalanan ini.
Masih banyak yang harus dipelajari dan dicapai, tetapi untuk saat ini aku bersyukur bisa berkontribusi dan berkembang dengan @axisrobotics

51
20
60
514
AirdropNext (✱,✱) retweeted

Jun 14
Have you ever thought about it?

50
18
59
407

Now it's time to go further with AXIS Physical AI connecting artificial intelligence with the physical world through robotics that can move, understand, and interact in real time. @axisrobotics
50
18
54
311
Jun 15
Impressive week @axisrobotics ....
The combination of articulated object TaskGen improvements, large-scale randomized view data collection, and stronger replay debugging infrastructure addresses several key bottlenecks in embodied AI.
The 80k randomized view demonstrations are particularly notable for improving robustness and generalization...!!!
Jun 15
Axis Weekly
This week was about making AXIS more reliable across the full robotics loop: stabilizing articulated-object TaskGen, scaling randomized-view data collection, improving product reliability for a new embodiment, and tightening the path from attempts to replays to real-world validation.
Key updates:
- Task Generation: We tested 12 articulated objects across 6 categories, fixed rotation and collision bugs, and prepared the articulated-object pipeline for the next round of internal testing.
- Randomized-view data: We added stronger camera-position randomization and collected around 80k demonstrations under randomized views, with the next milestone at 100k demos.
- New embodiment reliability: We completed teleoperation for a new embodiment and fixed evaluation issues caused by earlier task versions and inconsistent checker logic.
- Product infrastructure: We improved MuJoCo/attempt video export, backend task isolation, and API reliability for replay visualization and debugging workflows.
Details below 🧵
9
AirdropNext (✱,✱) retweeted
Jun 11
🚀 AirdropNext Early Alpha Backed by @solana & @Polygon
🟤 @tradeonpear Points Program is now LIVE...!
Pear is building the social layer and unified trading frontend, making on chain trading more accessible and seamless.
➡️ How to Join
1️⃣ Register here :
rewards.pear.trade/r/airdrop…
• Enter your email
• Click "Enter Our Waitlist Platform"
• Sign up with your X account
• Complete the social tasks
• Claim your points
2️⃣ Maximize Your Points
✅ Complete daily check-ins
✅ Stay consistent and don't miss a day
✅ Create content on X and submit your post link
✅ Create video content for additional engagement
Consistency is key. Start early, stay active, and stack your points!
1
1
71
Jun 14
Physical ai needs more than prediction it needs adaptation...
the infrastructure enabling continuous learning may become just important models themselves.
Jun 13

physical ai requires more than intelligent models.
it requires systems that can learn from feedback, adapt to changing environments, and improve through experience.
axis is building the infrastructure layer designed to support that evolution at scale.
@axisrobotics
12
Jun 14
Commercializing AI and robotics is often less about the model itself and more about delivering the complete pipeline.
Structured datasets, robust models, and deployment workflows together create real business value.
@axisrobotics just started
1
1
22
AirdropNext (✱,✱) retweeted

Jun 12
We are humbled by the response so far.
10,000 users on the waitlist
60,000 tasks completed
This is moving faster than we expected.
Join the waitlist → rewards.pear.trade

15,304
12,584
9,825
168,634
AirdropNext (✱,✱) retweeted

Jun 11
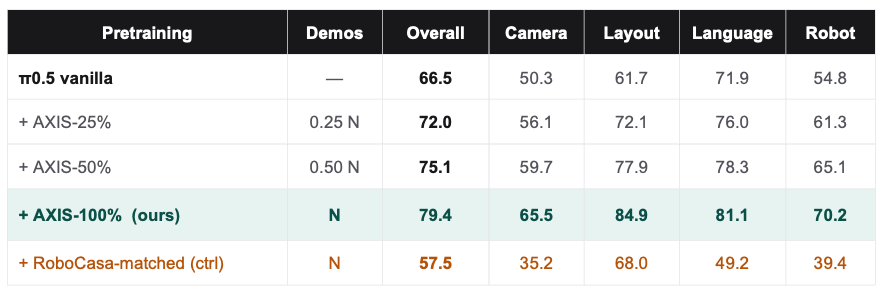
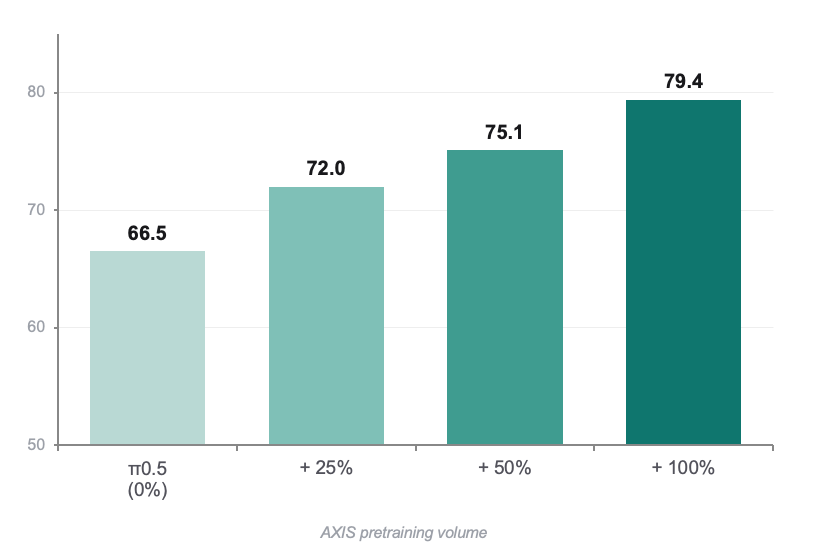
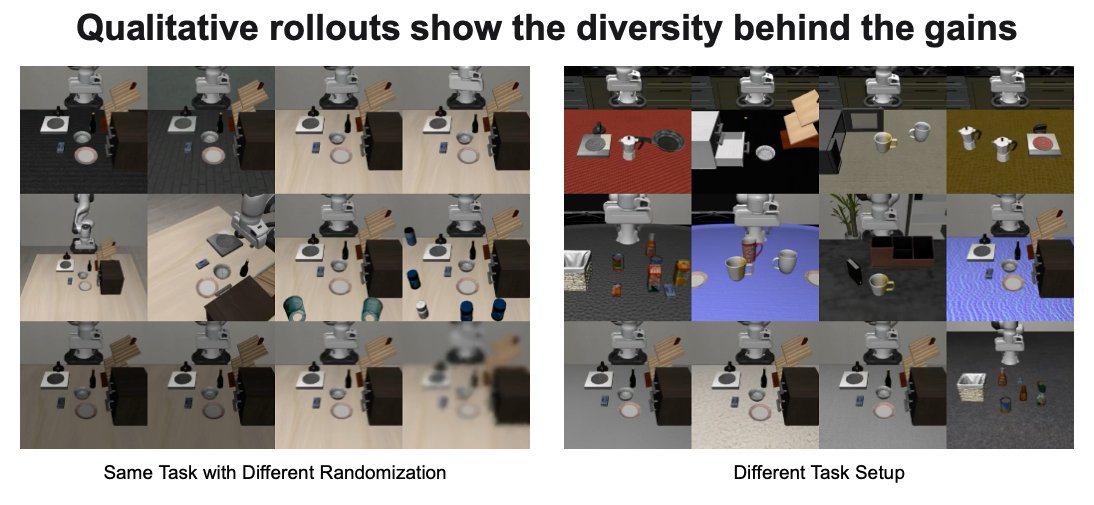
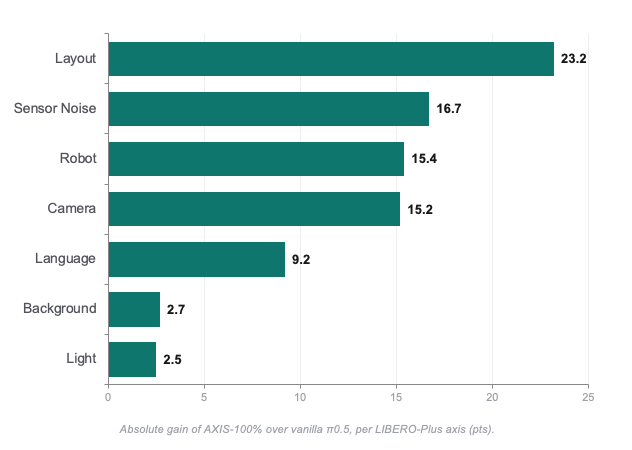
Axis shows that better robot data matters more than just more data. As Axis dataset size grows, performance keeps improving, especially in camera and layout robustness. The results suggest diverse tasks, scenes, and augmentations help robots generalize better, not just memorize.
Jun 10
In our conference submission, we evaluate AXIS as a growable data engine for robot manipulation through three questions:
1. Does AXIS pretraining improve π0.5 on downstream LIBERO-Plus robustness tasks, beyond a matched-volume baseline?
2. Does the gain scale with AXIS data volume, from 25% to 50% to 100% of data volume?
3. Which perturbation axes benefit the most, and do they match the diversity targeted by our augmentation pipeline?
Here, “AXIS” refers to our growable manipulation dataset snapshot built around a Franka Research 3 robot: 207 tabletop tasks across 7 scene categories, 50k human demonstrations, and 60k task/scene variants produced through cleaning and semantic-preserving augmentation.
Findings below 🧵
50
20
52
340
AirdropNext (✱,✱) retweeted

NIh aku sharing buat yang penasaran gimana sih cara kontribusi atau grinding di project web3 yang fokus ke robotika atau Physical AI ✨👌
Disini aku kasi liat visual saat ngelakuin teleoperasi pake 3 project yang lagi aku serius jalanin :
🤖 @axisrobotics
🤖 @BitRobotNetwork
🤖 @ZenO4AI
Pada masing-masing project ini kita nnti akan diberi tugas yang harus diselesaikan, contohnya kyk taruh wortel dipiring, nyusun balok supaya sejajar, angkat balok dan sebagainya dari yang gampang smpe sulit 😭
Intinya kita cuma perlu nyelesaiin tugas sesuai perintahnya aja, awalnya pasti sulit aku juga ngerasain gitu 😭 tapi kalo kalian udh paham mekanismenya pasti bisa kok 👌
Tapi yang perlu kalian ketahui masing-masing project punya mekanisme dan kontrol yang berbeda jadi kalian harus bisa beradaptasi 😉
Semangat grindingnya ya kawan ✨🔥



51
21
62
921
AirdropNext (✱,✱) retweeted

Jun 11
In the near future, an update will be rolled out on the Xeffy mini-app that allows users to submit and integrate their Wallet connection, Discord handle, and Twitter (X) handle.
First of all, please note that the $XEF TGE will proceed as scheduled without any issues in June, and the first round of user incentives will also be distributed within June!
The timeline for this process is as follows:
1. $XEF TGE
2. Wallet address and related information submission & integration via Mini-app and Discord
3. XAX Vault XAX Vault Launching
4. First round of user incentive distribution
thanks Community
14,926
16,669
20,908
175,032
Jun 11
Grinding hard from home today! 🔥
Running tasks, climbing ranks, and stacking rewards one mission at a time.
Ready for the next challenge and hoping to secure access to SN/04.
#BitRobot #AxisRobotics
Jun 9
GAxis (✱,✱)☀️
New week. New challenges. New access.
We’re giving away 10 BitRobot access codes over the next 72 hours.
Winners will get access to SN/04 and start earning rewards from both Axis and BitRobot.
To join:
1. Follow @axisrobotics & @BitRobotNetwork
2. Like repost this post
3. Comment with a screenshot or photo of where you’re training right now
Grinding tasks? Climbing the leaderboard?
Show us your journey.

20