
ROS is DOS. We are making Windows
Joined May 2026
- Tweets 78
- Following 119
- Followers 30
- Likes 8
23 Photos and videos





Jun 15
Most "edge AI" streams video to the cloud and hopes for the best.This one runs on a Raspberry Pi, sends a few hundred signed bytes instead, and refuses to do anything until a human signs off. No signature, no action. Fully auditable.
26
Jun 14
Out-and-back. No GPS the entire time.
Naive: 9.8m off.
With loop closure: 2.4m.
Same flight. Same hardware.
14
Jun 14
*"Perception moats just went from plan → pure-core in one evening. Terrain Visual-Nav (skyline vs cached DEM) is now a live GPS-denied anchor.
Kinematic EKF tracker coasts through full occlusions with terrain physics and reacquires probabilistically.
Cross-domain handoff v0.1 lets drone → rover take the target state vector seamlessly. Occlusions? Handled.
GPS denial? Handled.
Single platform blind spots? Handled. This isn’t another fragile CV bounding box.
This is persistent tracking that survives reality — wired straight into Replay, Rehearse, and ArcAssist. ROS is DOS.
We’re building the Windows.
26
Jun 13
Big day on ArcForge.
• 1990s-style terrain relief now live in Replay Rehearse (air ground)
• Full Discovery v1 schema history
• Payload store consolidation
• Cockpit HUD refresh
• Rover classification fix learned Improve proposals
19
Jun 13
Most flight logs tell you what the vehicle 'said' about itself.
ArcForge Replay also shows what *correlated* across every signal — and flags where the two disagree.
Assurance you can audit, not just trust. Coming in the first full build.
19
Jun 12
Three days. 108 changes shipped. One person.
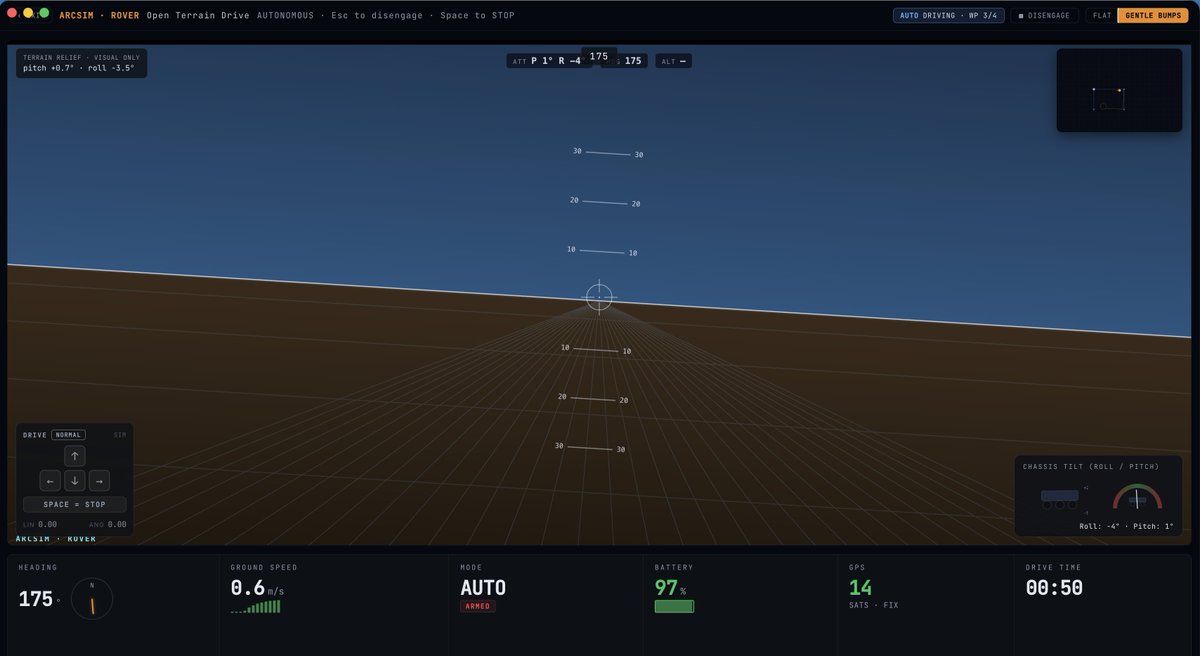
ArcForge beta.3 is live — drones and ground robots now run the same mission together, one operator, sim to real hardware.
Solo-building the thing that makes autonomous systems actually usable.
17
Jun 12
Codebases naturally accrete complexity. Today we performed a controlled trim — restoring clarity without losing capability
38
Jun 12
1. Claude Code lied to me once. Seven subsystems — described, referenced, built upon across sessions — that were never committed. They existed in package.json and the AI's memory. Nowhere else. Here's what I did about it. 🧵
2. This wasn't a hallucinated API. It was entire subsystems asserted as done, internally consistent, fictional. The failure mode: session memory treated as repo state. Every new session inherited the claim. None inherited the code.
3. The fix wasn't "review harder." You can't deep-review 35 PRs/day — and that's the genuine velocity of AI-assisted dev. The fix was making lies build-breaking: a capability ledger 322 CI gates, every claim must resolve to committed code or the build fails.
4. One month later: 255K LOC, every gate resolves to real files, zero recurrence. AI coding at this speed is a trust system. Build the trust architecture or inherit the fiction. Verify, then trust — enforced by the build.
1
55
Jun 11
Most "swarm" demos are N copies of the same drone. Yesterday ArcForge flew 2 copters 1 rover on one coordinated mission — ground vehicle gating air advance, single operator. First run, gate green.
27
ArcForge retweeted

Jun 11
You are far more dangerous to your startup than competitors are. A hundred times more startups die from poor execution by their founders than are killed by competitors.
229
664
8,510
414,938
Jun 11
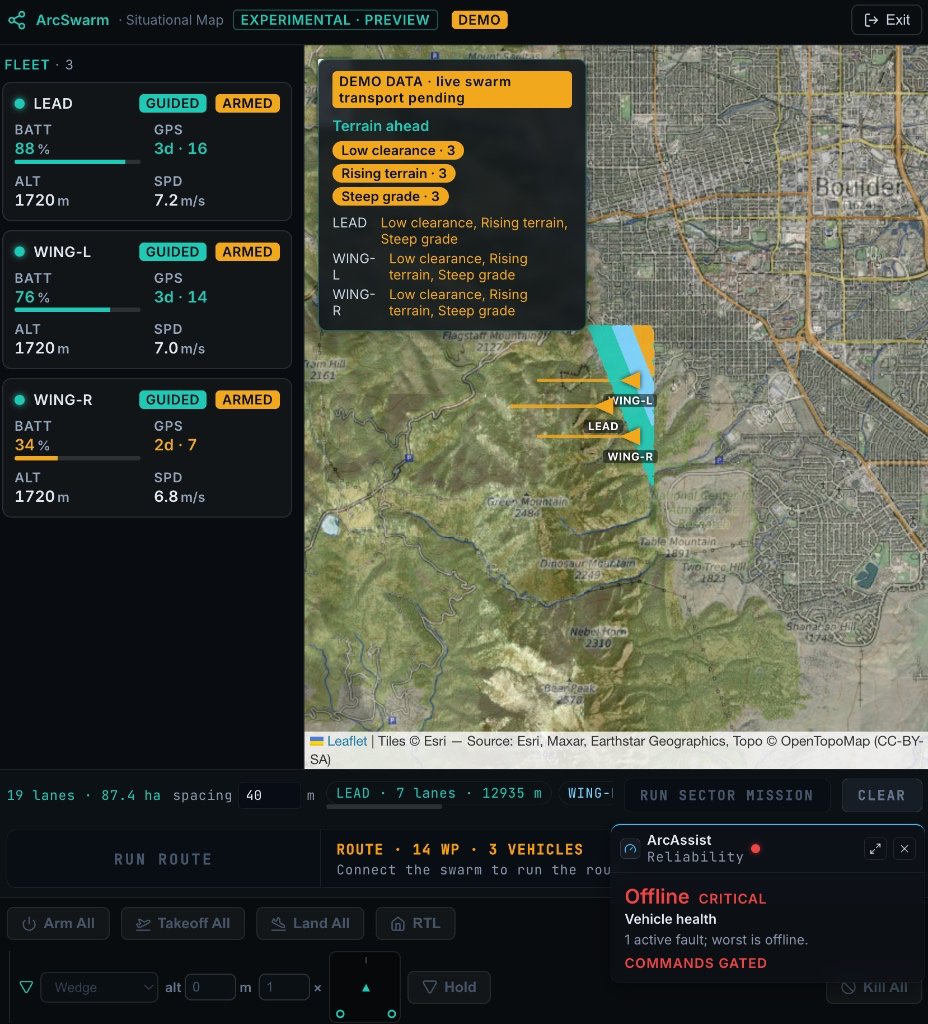
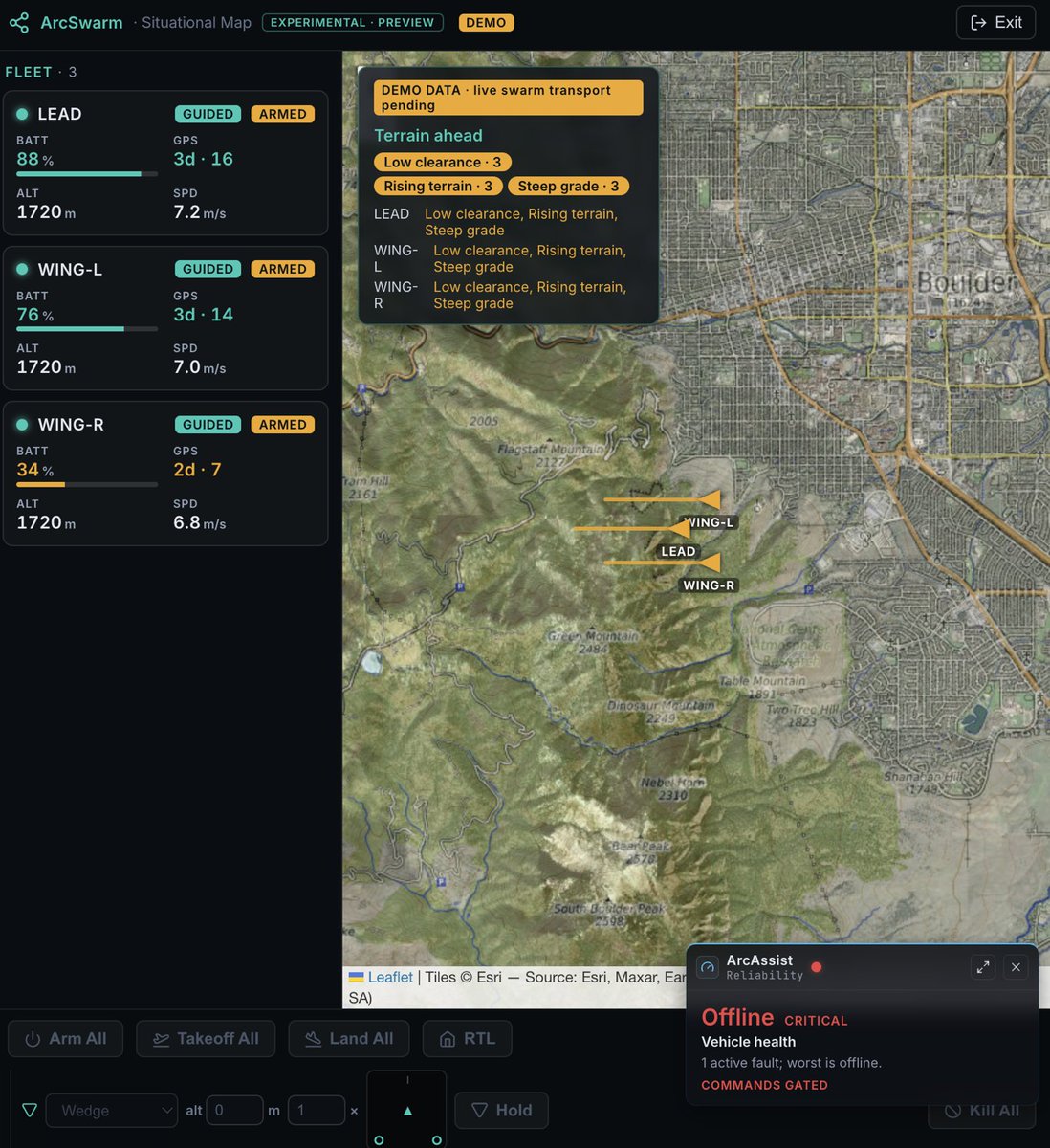
ArcSwarm just got its first major polish pass.
One operator. Three armed vehicles. Real-time terrain intelligence formation oversight.
The swarm GCS that doesn’t make you feel like you’re drowning in panels anymore.
16
Jun 10
Most robotics software tells you what a robot is doing. ArcControl is being built to tell you what the operation is doing.
1
34
Jun 9
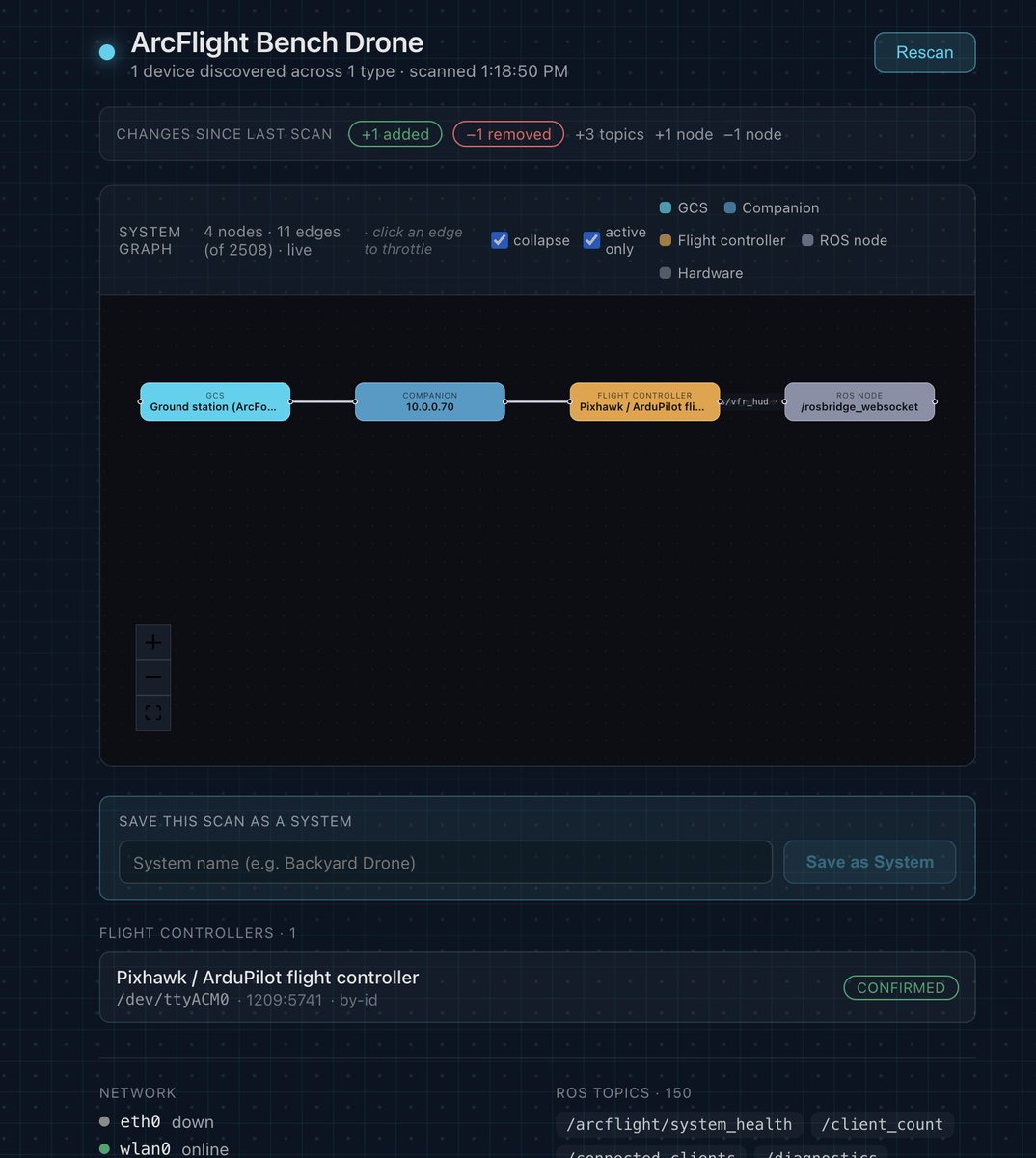
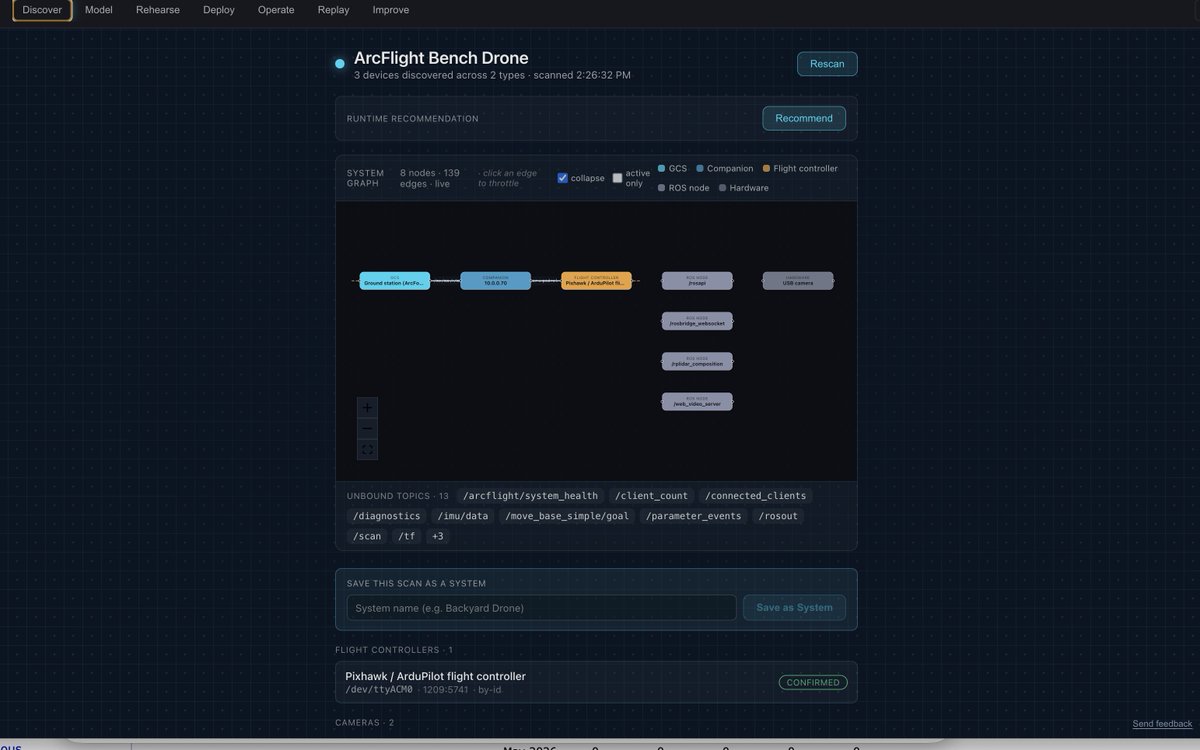
Just shipped something every drone/robotics operator has secretly wanted.
Live System Graph in ArcForge.
Zero-config. Connect to your vehicle → instantly see the real topology: Ground Station ↔ Companion ↔ Flight Controller every ROS node, wired by actual pub/sub topics.
Edges pulse at real rates (/mavros/imu/data @ 2 Hz, local_position/pose @ 4.8 Hz, etc.).
Click any edge to throttle it — inject latency, packet loss, or full link drop — and watch your failsafes react in real time.
“Active only” collapse makes even monster MAVROS graphs usable.
One-click companion probe auto-recommends the right runtime profile.
Foxglove-class introspection interactive resilience testing, native in the GCS. Built almost entirely from existing engines. Fully verified on real ArduPilot hardware.
This is why we’re building the Windows layer ROS always deserved.
2
4
78
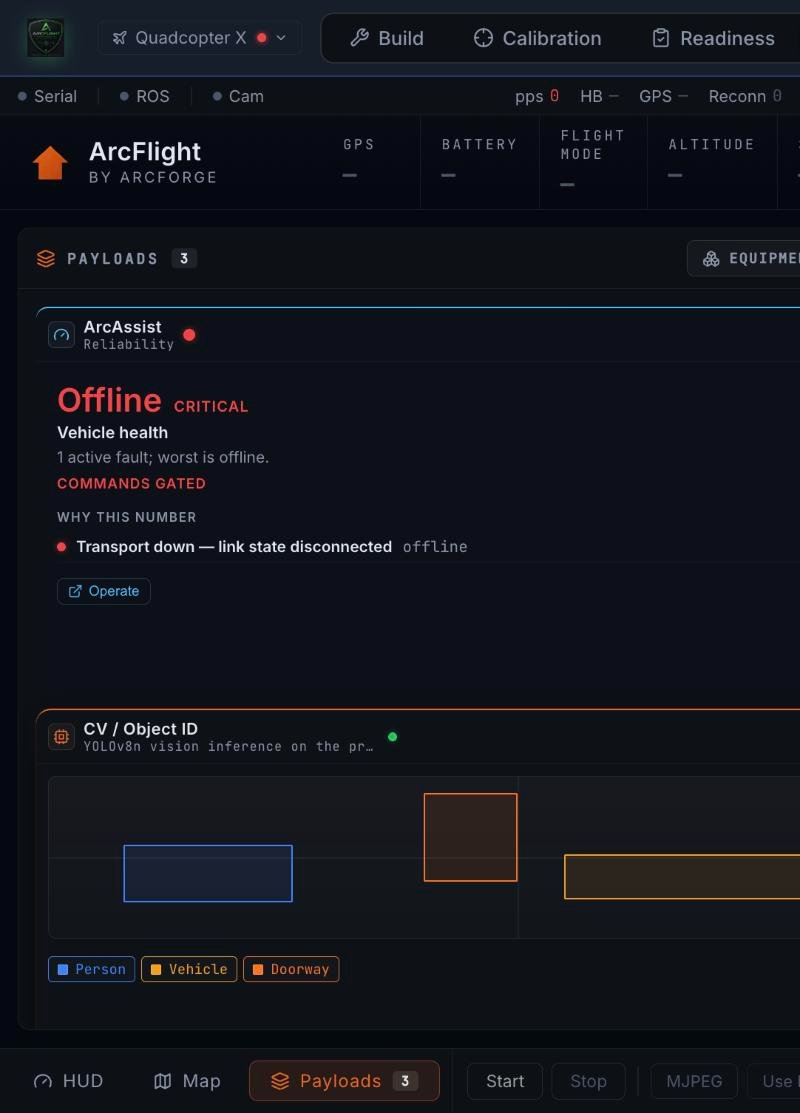
Jun 9
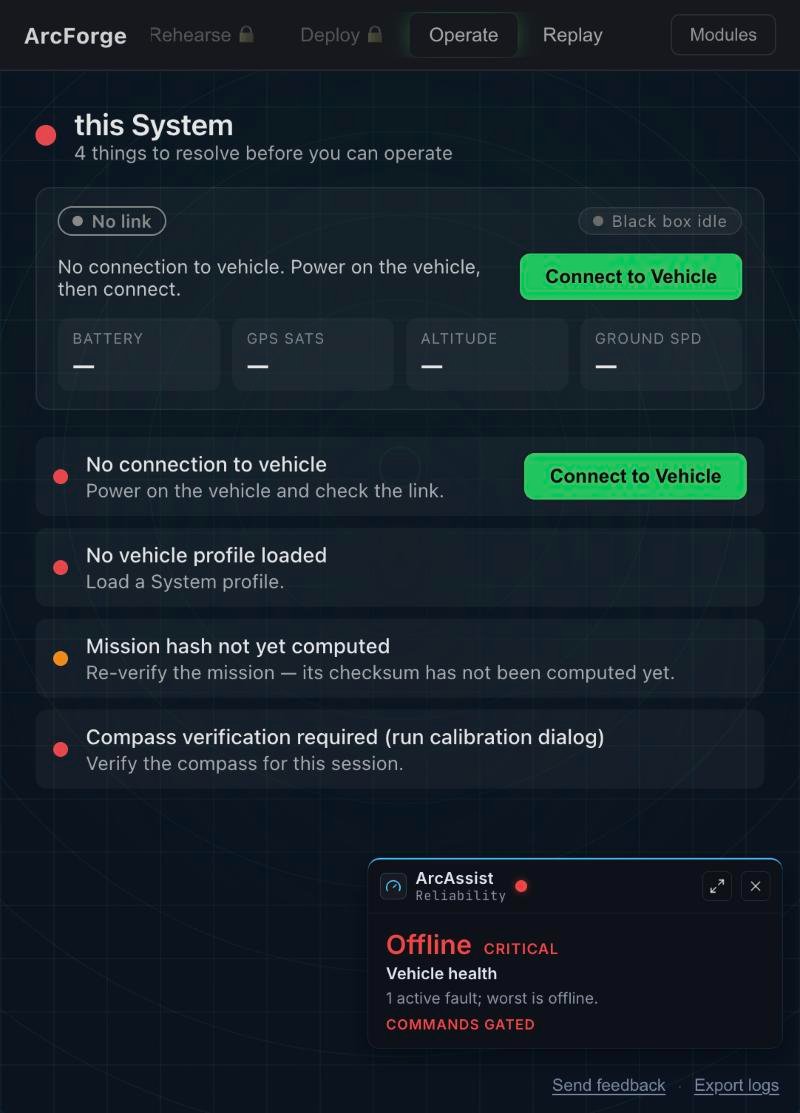
One thing I’ve learned building robotics software: operators don’t need another dashboard.
They need answers.
ArcAssist (shipping Friday) takes vehicle health, perception trust, deployment status, and mission reliability and turns them into a single explainable assistant that tells you what’s wrong, why, and what to do next.
2
49
Jun 8
Today we shipped Rewind & Override in ArcForge.
Pause a simulation, rewind to a checkpoint, change a parameter, and fork a new outcome without restarting the mission.
When one branch performs better, promote it and carry the improvement forward.
v0.7.0-beta.1
1
38
Jun 8
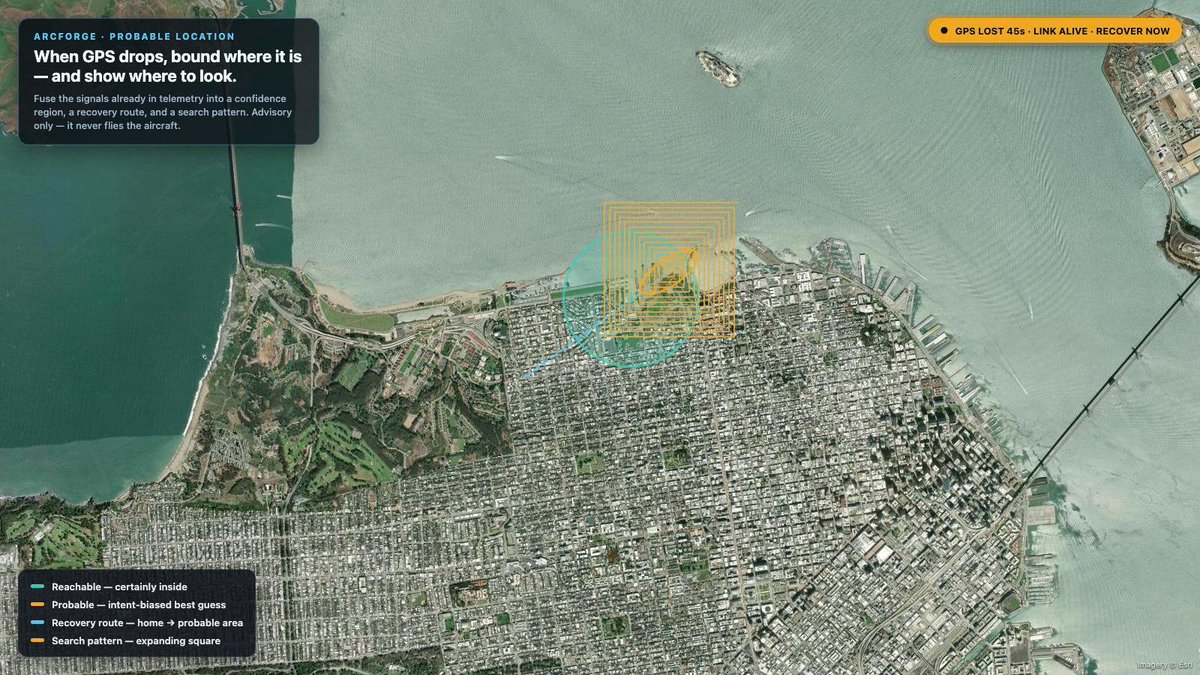
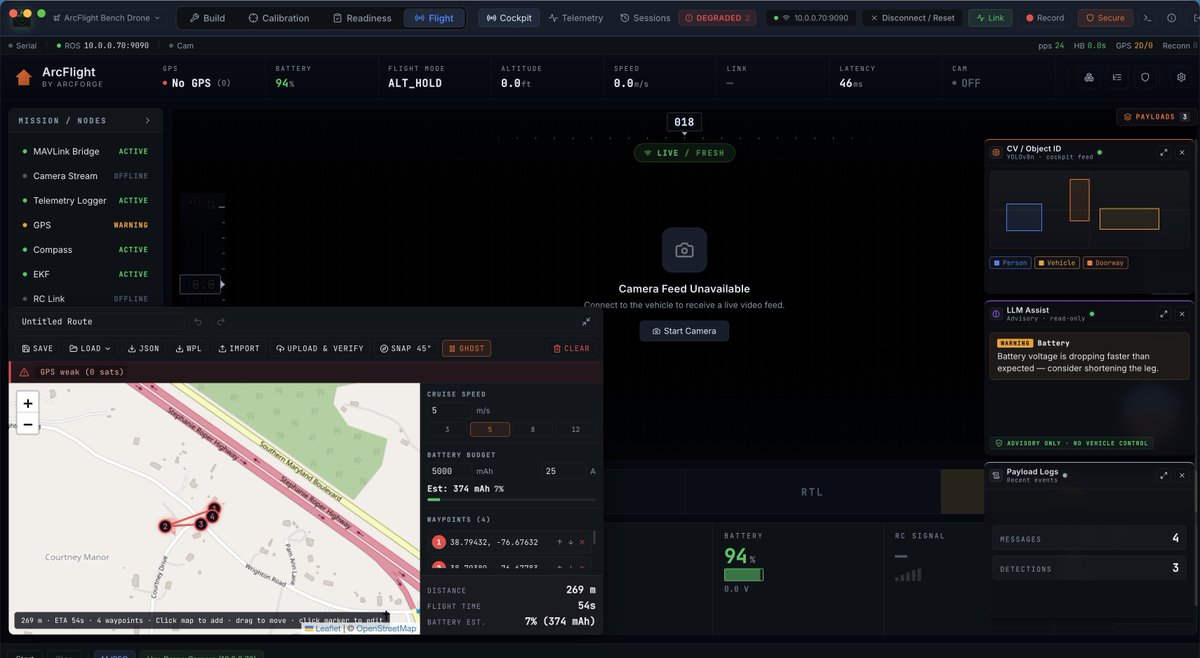
ArcForge v0.7.0-beta.1 includes GPS-denied recovery workflows that can estimate probable vehicle location, generate recovery search patterns, evaluate safe return routes, and upload recovery missions through a gated operator workflow. Come and check it out
1
30
Jun 8
If you run drones/robots and want a modern mission control desktop app, this one’s for you.Visual ROS2 orchestration studio for PX4 / ArduPilot swarms.Built solo in 30 days. Serious focus on:Multi-target deploy (Pi 5, NUC, Jetson Orin)
Command gates & safety
First-run honesty
Swarm orchestration
Real hardware SITL
1
26
Jun 5
No more QGroundControl.
ArcForge now flies full autonomous waypoint missions directly from the app.
Plan in the verb workflow → signed deploy → Run Mission with live progress → smart abort/RTL.
Swarm formation hold, rover autonomy, physics-aware planning, and GPS-optional origin resolution all landed today.
31 PRs. Real SITL validation. Tagged momentum.
This is what a real autonomy platform looks like.
#ArcForge
1
23
Jun 5
ArcForge v6.0 is out — "Complete the Lifecycle"
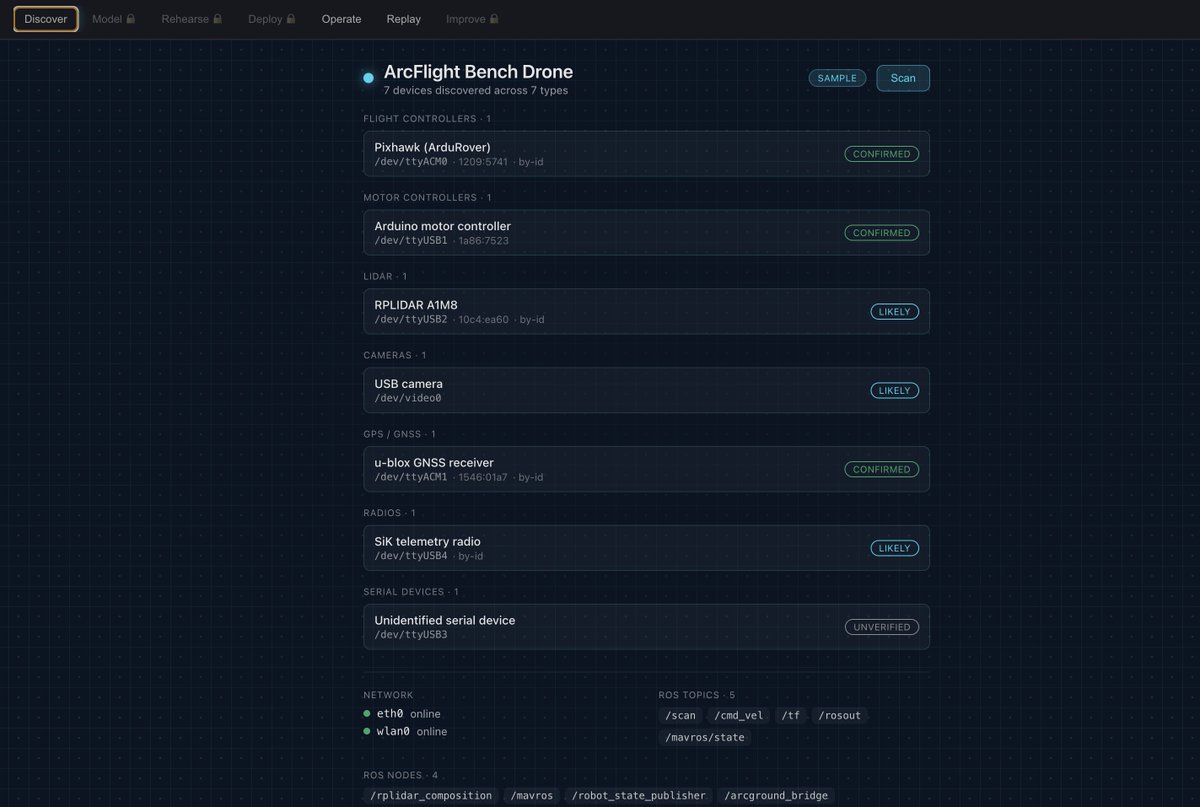
We now ship the full loop:
Discover real hardware
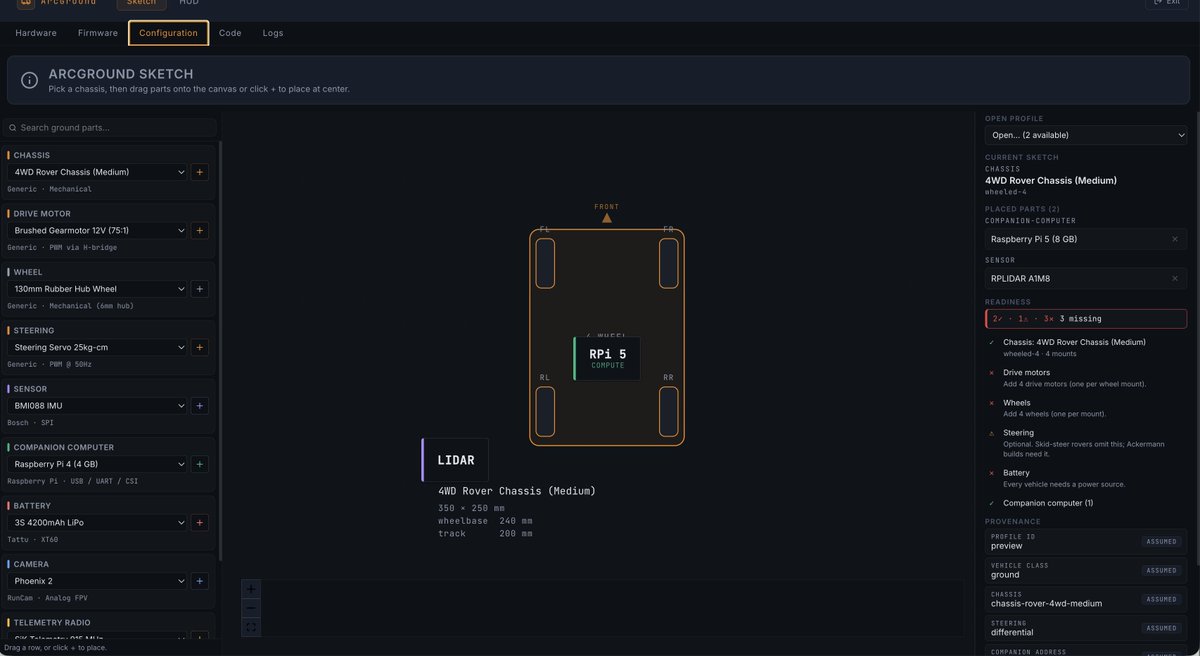
Model the vehicle
Rehearse in sim
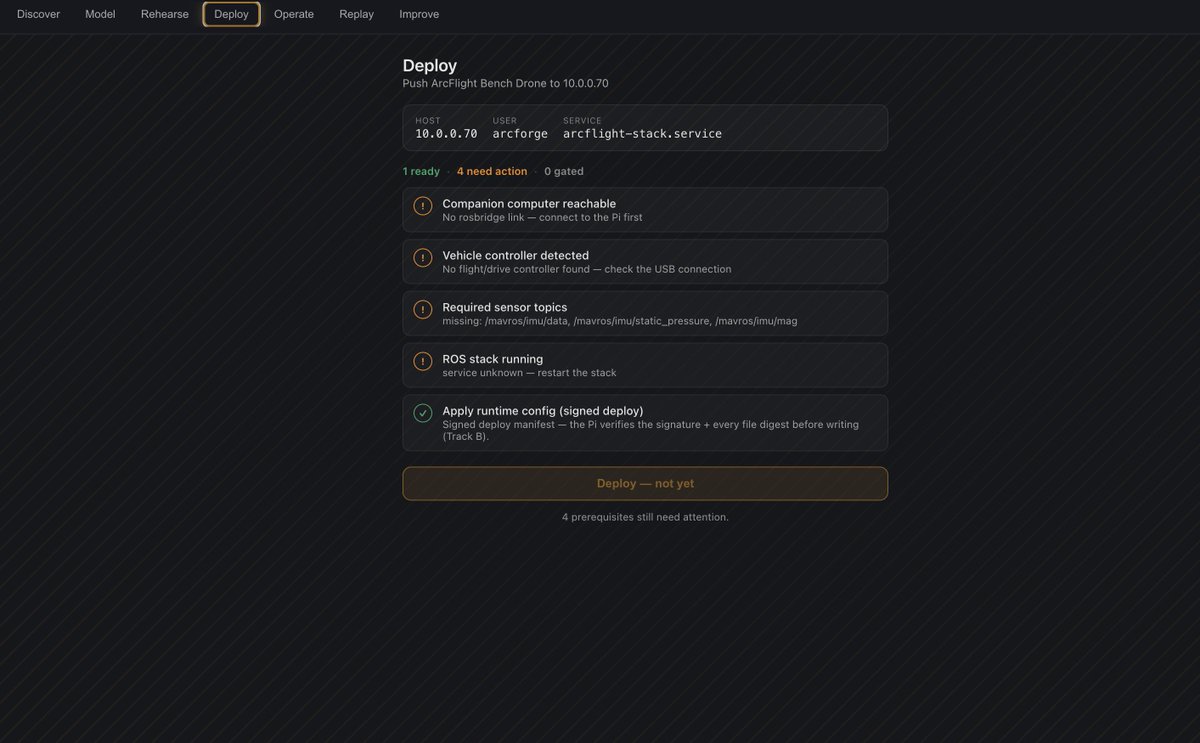
Deploy signed & gated
Operate
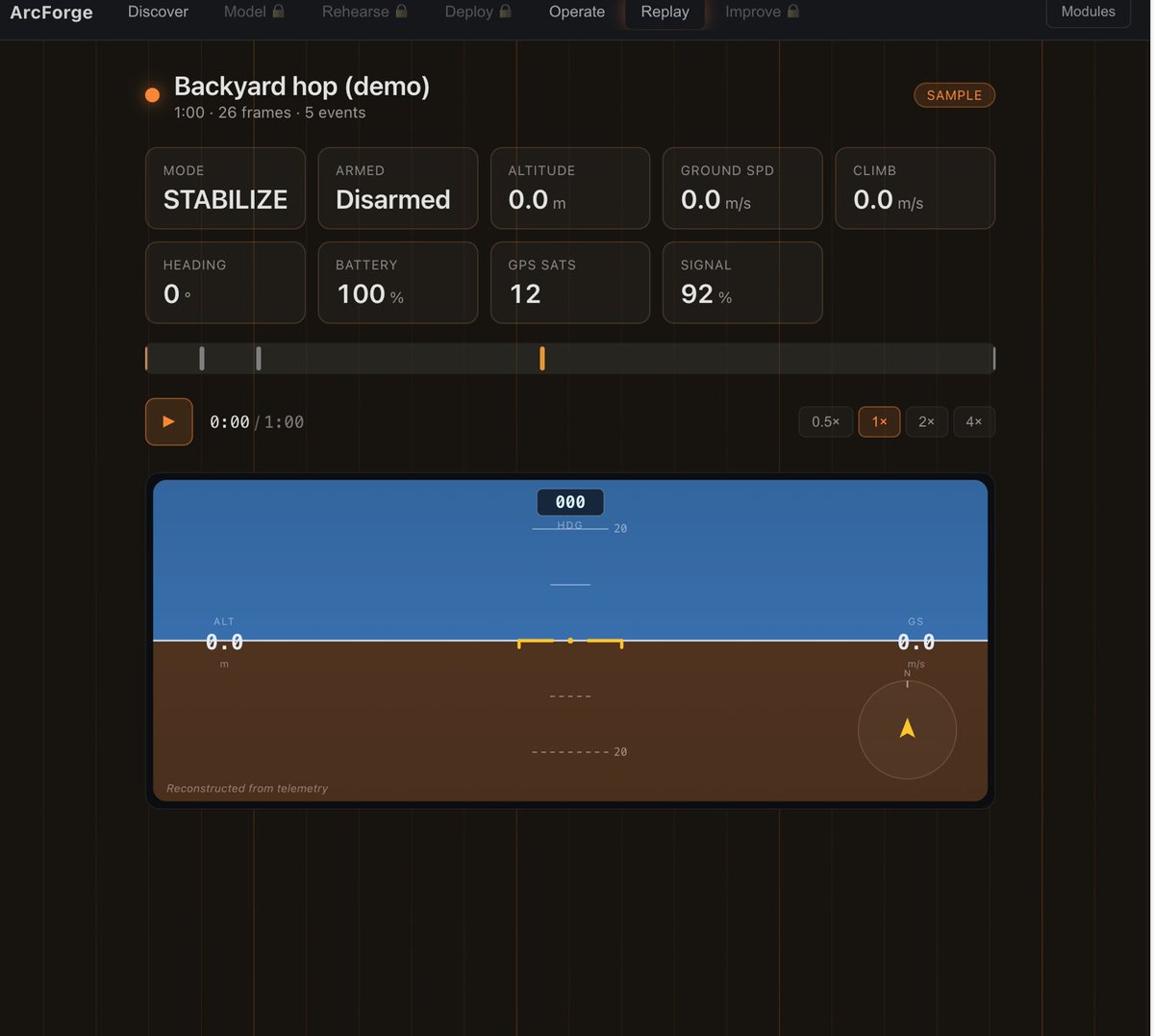
Replay with beautiful reconstruction
Improve → one-click param updates & new scenarios
Signed deploys are live (manifest Pi-side verification).
ArcSwarm situational map is in.
ArcGround replay is now legible for rovers.
This isn’t another ROS tool.
This is starting to feel like a real platform.
ROS is DOS.
We are making Windows.
#ArcForge #Robotics #Drone #Rover #ROS2
1
23