
Associate Professor of robotics at Arizona State University. We study how robots work with one another, humans, and complex environments.
Joined January 2018
- Tweets 99
- Following 331
- Followers 453
- Likes 848
18 Photos and videos













Wenlong Zhang retweeted

14 Jan 2025
Researchers from @ASUEngineering develop a new algorithm for human robot interaction that relies upon efficiently solving complex partial differential equations using a novel hybrid learning approach.
ieeexplore.ieee.org/document…
#NeuralNetworks #HumanRobotInteraction #robots
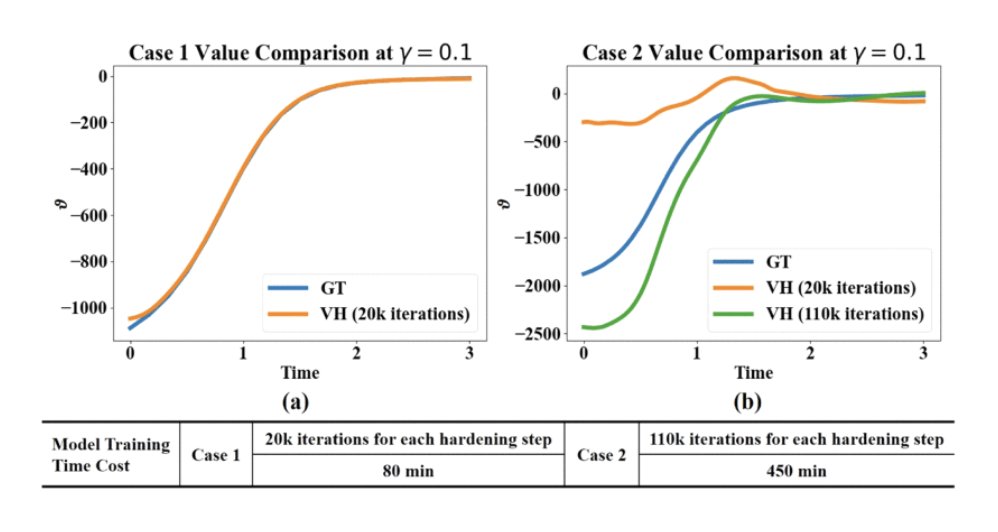
ALT (a) VH uses 20k training iterations for each hardening step, for a total of ten steps to converge to ground truth in Case 1. (b) VH uses 20k/110k training iterations for each hardening step, for a total of ten steps to converge to ground truth in Case 2. Compared to Case 1, VH takes around 5.6 times longer to converge to the ground truth in Case 2.
1
3
539

22 Jul 2024
Check out this exciting work on learning safety constraints from human feedback, led by my colleague @jinwanxin @ASUEngineering !!
22 Jul 2024

Robots can infer rewards from human feedback, but what about safety boundaries? Our work, Safe MPC Alignment (arxiv.org/abs/2407.04216), led by @ZhixianXie_ASU, collab’d with @asuriselab, Yi Ren, @zhaoran_wang, and @pappasg69, shows it’s possible and can be human-data efficient!
2
515
14 Apr 2024
Our full-day workshop on Bio-inspired Soft Aerial Robotics will start at 8 am tomorrow in Room Encore 2. We look forward to seeing you there!
soft-aerial-robotics.com/hom…
14 Apr 2024

🚀 Join us tomorrow (Apr, 14) at RoboSoft in San Diego for the Bio-inspired Soft Aerial workshop! Explore groundbreaking aerial robotics with us. Don't miss out! 🤖✈️ #RoboSoft2024 #Robotics #Workshop
1
7
696
1 Oct 2023
We are at @ieeeiros! My student Weijia Tao will present WHOPPEr Drone, which uses its compliant body to perch and transport objects (TuAT4, 140D). I will present our work with @spring_berman's team on configuration tracking control of soft robotic arm (MoAT6, 140FG)! #IROS2023
2
1
23
1,373
18 Aug 2023
Our work on soft aerial robot made the cover on @SoftRobotics_JN! Please check it out if you have not done so :)

Our fun work on Soft-Bodied Drones for collision resilence and perching was also selected for this issue's cover on @SoftRobotics_JN. Please find the paper here: liebertpub.com/doi/full/10.1…
11
949
10 Aug 2023
Excited to announce my student Emiliano Quiñones Yumbla has successfully defended his PhD dissertation on sensing, control, and testing of wearable soft robot! He will join @UPRCA_Informa as a tenure-track faculty member. Congrats and good luck to your new chapter as a professor!
14
776
Wenlong Zhang retweeted

10 May 2023
Recent research proposes and develops a lightweight, inflatable, soft-bodied aerial robot that can pneumatically vary its body stiffness to achieve intrinsic collision resilience. #softrobotics
liebertpub.com/doi/10.1089/s…

7
56
6,225
Wenlong Zhang retweeted

25 Apr 2023
An inflatable drone can perch on a wide variety of objects by colliding with them – taking advantage of its soft-body physics to increase its contact time with the landing zone without bouncing off
Learn more: newscientist.com/article/237…
1
3
33
38,692
21 Apr 2023
Excited to share our new work on SoBAR (Soft-Bodied Aerial Robot)! The robot uses fabric-based inflatable frame with tunable stiffness for collision resilience and perching. This work was published @SoftRobotics_JN.
Paper: dx.doi.org/10.1089/soro.2022…
Videos: youtube.com/playlist?list=PL…
SoBAR (Soft-Bodied Aerial Robot) just released on @SoftRobotics_JN! It's soft textile body supports collision resilience & dynamic perching. Onboard fabric bistable grasper used for rapid shape forming grasping. (@patnaiKarishma @asuriselab)
#robotics #softrobot #technology

2
1
10
1,785
14 Apr 2023
Congratulations @patnaiKarishma for delivering a wonderful dissertation talk! Thank you all for joining in person and online. Karishma made excellent contributions to design, control, and planning of morphing and collision-resilient drones. She is #6 PhD graduate from our lab!
10
956
28 Mar 2023
Check out our paper “Learning Post-Stroke Gait Training Strategies by Modeling Patient-Therapist Interaction" published in IEEE T-NSRE! We aimed to achieve effective robot-aided gait training by incorporating the expertise of therapists in stroke rehab. doi.org/10.1109/TNSRE.2023.3…
1
11
605
28 Mar 2023
We custom designed a wearable sensing system to measure lower-limb kinematics of patients and assistive force applied by therapists. This data is used to directly learn a virtual impedance model that captures therapist's assistive strategies and predicts their assistive torque.
1
188
28 Mar 2023
This work is led by my students Mostafa Rezayat and Mason Smith. Special thanks to our collaborator at Barrow Neurological Institute and @NSF for the support!
152
20 Jan 2023
New paper alert! Led by @patnaiKarishma, our work on adaptive attitude control for foldable quadrotors is published @CSSIEEE L-CSS! We employed switched systems theory to find switching conditions between different configurations and integrate them into a trajectory planner.
1
9
1,100
20 Jan 2023
This work highlights the needs to co-design planner and controller for morphing robots. We validate the proposed algorithms by simulating a foldable quadrotor’s flight through a passageway. Paper: ieeexplore.ieee.org/abstract…. We will also present this work @ACC_Control. Check it out!
1
213
20 Dec 2022
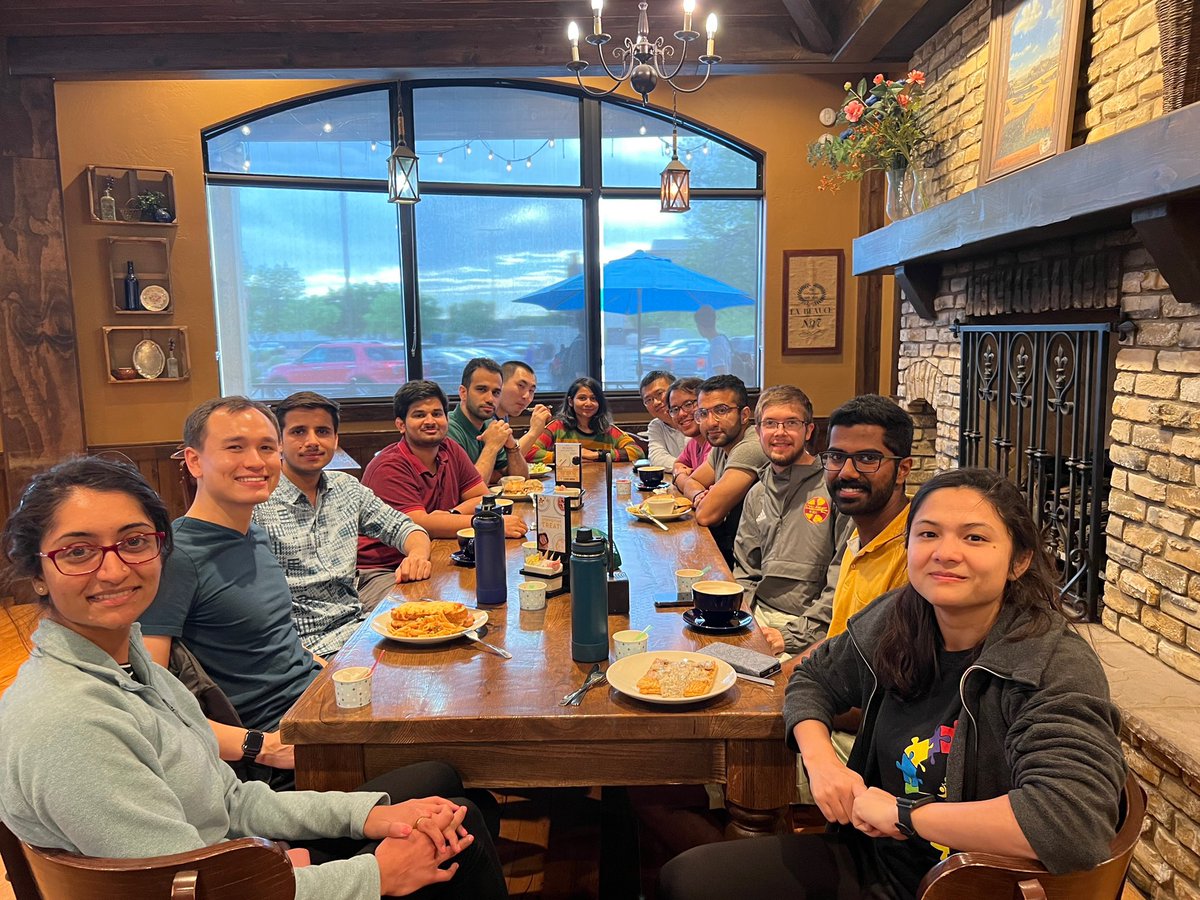
We enjoyed some hiking, chatting, and (of course) nice food to celebrate the end of 2022!! So happy we got together after almost 3 years of social distancing. It was great to hear everyone’s fun stories other than research and papers :)
11
555
14 Oct 2022
A fully packed room to celebrate the birth of the newest school @ASUEngineering. Excited to be part of the new School of Manufacturing Systems and Networks! @MSNatASU
3
16