
Joined May 2026
- Tweets 73
- Following 8
- Followers 325
- Likes 54
19 Photos and videos














Pinned Tweet

May 11
Axisが正式に@base上でメインネット稼働を開始しました。
Axisは、誰もが参加できる形で、現実世界のための「フィジカルAI」を拡張しています。
今すぐロボット・インテリジェンスの構築を始めましょう: hub.axisrobotics.ai
Mar 24

Axis is officially LIVE on @base. 🔵
Axis is scaling Physical AI for the real world, contributed by everyone.
You can control robots in a virtual world, generate training data at scale, and help build the brain behind tomorrow's robots. All from browser. No hardware needed.
Start building robotics intelligence today: hub.axisrobotics.ai
1
9
991
AxisroboticsJP retweeted

Jun 11
Excited to build robotics on @base.
Real energy at SuperAI with @baseapac.
We’re just getting started bringing robots, AI, and onchain coordination together.

AI is exciting.
AI onchain is even more exciting.
Great to showcase some of the cutting-edge AI robotics innovations being built on @base to @Hassan_NY, Country Director of @CoinbaseSG, at SuperAI.
Featuring @axisrobotics and @InvLambda 🤖🟦

104
54
178
6,587
Axis Weekly
今週は、AXISのループ全体をよりスケーラブルにすることに注力しました。
データからモデルまでのワークフロー自動化、リカバリー重視の学習検証、TaskGenの対応範囲拡大、そしてデータセットとモデルスタックの公開準備を進めています。
主なアップデート:
データからモデルまでの自動化
•反復的ながら重要なワークフローを、スクリプトで高速化・標準化しました。
継続成長型の学習
•複数の失敗タスクにおいて、データ量ごとの学習と成功率比較を完了しました。
失敗タスクの拡張
•新しい失敗タスク群をテスト環境に追加し、データ量・データ品質・ランダム化に関するアブレーション評価の範囲を広げました。
TaskGen
•関節付きオブジェクトの生成機能が、自動生成パイプラインに統合されました。
モデルと公開準備
•最初のファインチューニング、評価、ベンチマークを完了し、データセットの学会投稿も完了しました。現在は公開に向けて実験結果の改善を進めています。
詳細は下のスレッドで 🧵
Jun 8
Axis Weekly
This week was about making the AXIS loop more scalable end to end: automating data-to-model workflows, testing recovery-driven training, expanding TaskGen coverage, and preparing the dataset and model stack for release.
Key updates:
- Data-to-model automation: We used scripts to speed up and standardize several repetitive but critical workflows.
- Continuous-growth training: We completed multi-data-scale training and success-rate comparisons across several failure tasks.
- Failure task expansion: A new batch of failure tasks has been pushed to test, expanding the evaluation range for ablations across data scale, data quality, and randomization.
- TaskGen: Articulated-object generation is now merged into the automatic generation pipeline.
- Model and release prep: We finished the first round of fine-tuning, evaluation, and benchmarking, completed the dataset’s conference submission, and are now improving experimental results for release.
Details below 🧵
1
3
165
TaskGenの開発面では、関節付きオブジェクト(Articulated Object)の生成機能が自動生成パイプラインに統合されました。
これによりTaskGenは、キャビネット、食器洗い機、引き出しなどの関節構造を持つオブジェクトの生成に対応し、既存のランダム化ワークフローとも互換性を維持しています。
顧客であるF向けには、すでに27種類のタスクがデータ収集可能な状態となっており、さらに9種類のタスクを現在生成中**です。また、マルチエンボディメント(複数のロボット形態への対応)やChain of Thought(思考連鎖型)タスク生成も稼働を開始しています。
これによりTaskGenは、長時間にわたる複雑なタスク(Long-Horizon Tasks)、複数オブジェクトを扱うタスク、そして関節付きオブジェクトの操作タスクへの対応をさらに強化し、より高度なロボット学習データの生成基盤へと進化しています。
1
56
モデル開発の面では、ファインチューニング・評価・ベンチマークの第1ラウンドを完了し、現在はさらなる性能向上に向けてデータレシピの調整を進めています。
また、π0.5の評価パイプラインが実機向けスタックに統合され、Web上でのポリシー推論(Policy Inference)では、モデルのチェックポイントを読み込んでオンライン環境へデプロイできるようになりました。
さらに、データセットの学会投稿も完了しており、現在は今後の公開に向けて実験結果の改善と最適化を進めています。
今後は、
•大規模なアブレーション実験の継続
•チェックポイントの大量生成
•失敗タスク(Failure Tasks)の大規模生成
•モデル可視化機能のHubへの実装
を進めていく予定です。
加えて、新たな実機ロボット(Embodiment)との接続作業も開始しています。
AXISは、シミュレーション上で収集したデータを学習・評価し、その成果を実機へ展開するサイクルをさらに強化しており、より汎用的なPhysical AIの実現に向けて開発を加速しています。
詳細は今後のアップデートでお伝えします。 🚀
51
AxisroboticsJP retweeted
Jun 8
Axis Weekly
This week was about making the AXIS loop more scalable end to end: automating data-to-model workflows, testing recovery-driven training, expanding TaskGen coverage, and preparing the dataset and model stack for release.
Key updates:
- Data-to-model automation: We used scripts to speed up and standardize several repetitive but critical workflows.
- Continuous-growth training: We completed multi-data-scale training and success-rate comparisons across several failure tasks.
- Failure task expansion: A new batch of failure tasks has been pushed to test, expanding the evaluation range for ablations across data scale, data quality, and randomization.
- TaskGen: Articulated-object generation is now merged into the automatic generation pipeline.
- Model and release prep: We finished the first round of fine-tuning, evaluation, and benchmarking, completed the dataset’s conference submission, and are now improving experimental results for release.
Details below 🧵
Jun 1
Axis Weekly
This week was about trust and transfer: making community data cleaner, generated tasks broader, and trained policies more robust as they move from simulation to real robots.
Key updates:
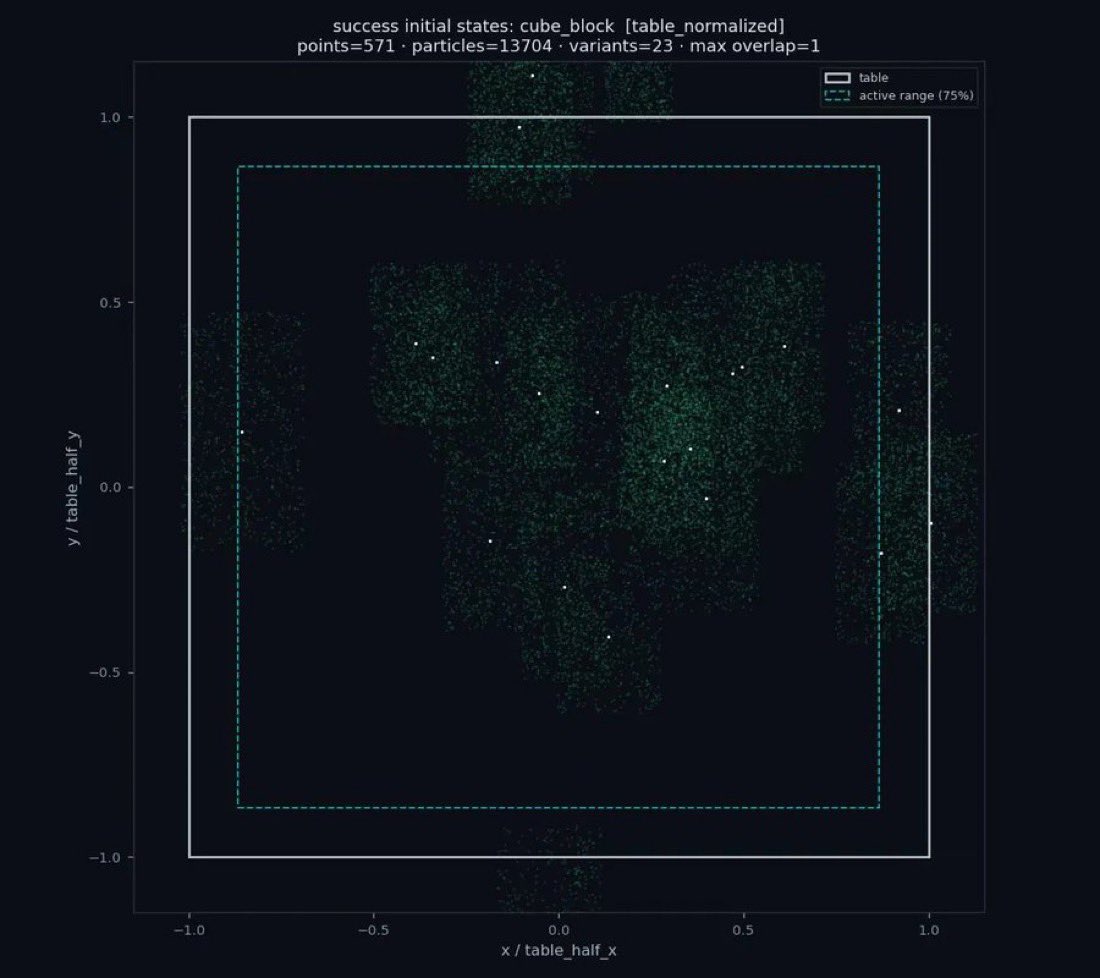
- Data quality: We completed a suspicious-user audit script to detect abnormal collection behavior using user statistics and replay/verify failure reasons.
- Webapp and simulation: We improved key gripper and asset interactions, including penetration, heavy-object grasping, and IK flexibility.
- Recover-from-failure: We tested Failure Task 892 and collected 300 failure initial states, with the next round moving to repaired and more randomized tasks.
- TaskGen: Articulated-object generation is now merged into the automatic generation pipeline, covering cabinets, dishwashers, drawers, and existing randomization workflows.
- Model and real-world stack: We completed the first round of fine-tuning, evaluation, and benchmarking, merged the π0.5 evaluation pipeline into the real-world stack, and started bringing a new embodiment into the loop.
A closer look at this week’s progress 🧵
131
58
234
18,844
1M 個の軌道が Axis 上で生成されました。
当社の分散型 Physical AI データエンジンにとって、重要なマイルストーンです。
Jun 7
1M trajectories generated on Axis.
A major milestone for our distributed Physical AI data engine.
1
30
AxisroboticsJP retweeted
Jun 7
1M trajectories generated on Axis.
A major milestone for our distributed Physical AI data engine.
205
99
354
16,963
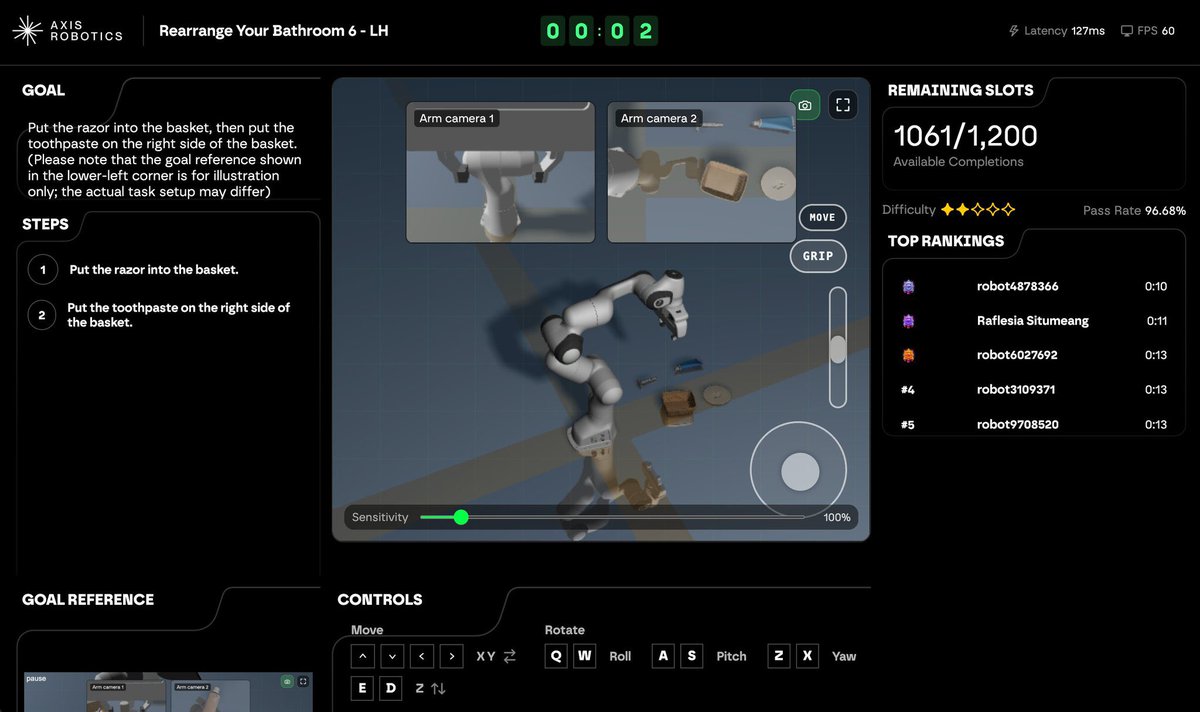
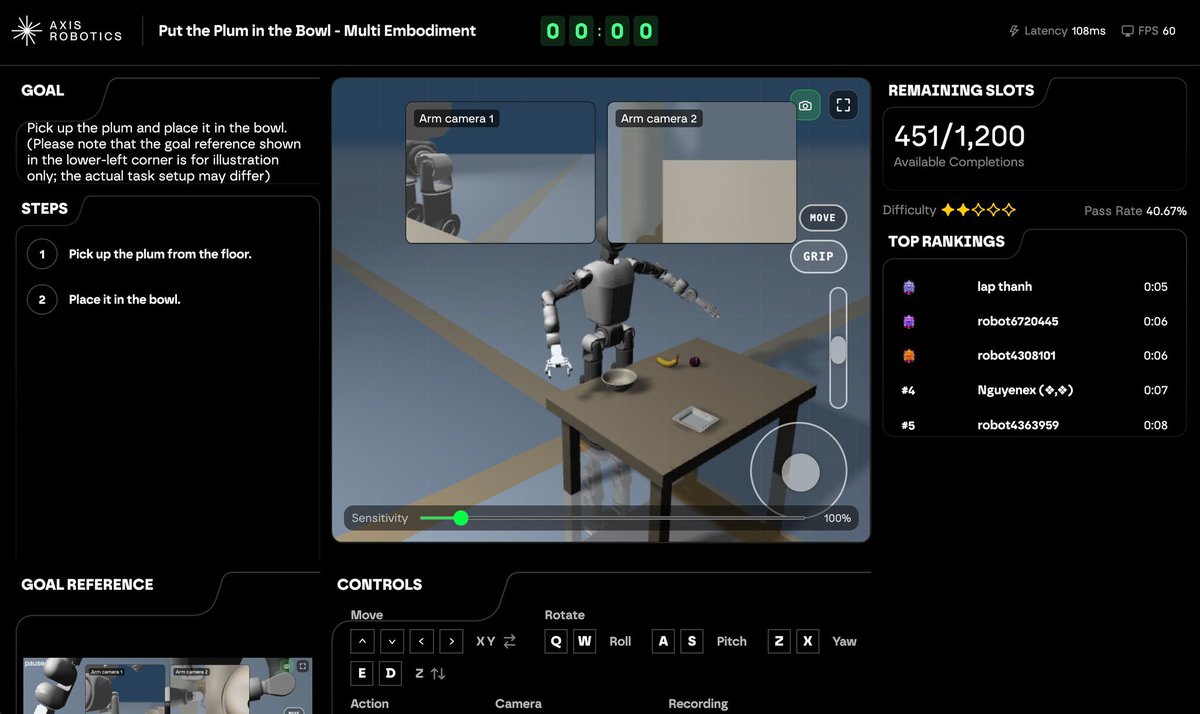
最近、Axisでは新しいロボットデータ収集タスクを公開しました。
今回の重点は、長期タスク(LH)とクロス・エンボディメントタスク(Multi Embodiment)です。
これには、両手を使った遠隔操作や、異なるロボット形態へのタスク適応が含まれます。
なぜ重要なのか:
1. Axisは、より複雑で現実世界に近いロボットタスクへ進んでいる。
2. 長期タスクにより、複雑なデータ収集をシミュレーション上でよりスケーラブルにできる。
3. 段階的なチェッカーにより、長いタスクをより明確な学習シグナルに変換できる。
4. クロス・エンボディメントタスクにより、Axisは複数のロボット形態や制御方式に対応しやすくなる。
5. Axisは、データの多様性と複雑性の両方を高めている。
6. 目的は、単にデータを増やすことではなく、より価値のあるデータを増やすこと。
詳細は以下のスレッドで解説します。🧵
Jun 5
We recently launched a new set of robotic data collection tasks, with a focus on long-horizon tasks (LH) and cross-embodiment tasks (Multi Embodiment). These include bimanual teleoperation and task adaptation across different robot morphologies.
Why this matters:
1. Axis is moving toward more complex, real-world robotic tasks.
2. Long-horizon tasks make complex data collection more scalable in simulation.
3. Staged checkers turn long tasks into clearer training signals.
4. Cross-embodiment tasks help Axis support multiple robot forms and control modes.
5. Axis is improving both the diversity and complexity of data.
6. The goal is not just more data, but more valuable data.
Details below. 🧵


1
73
5/6
プロダクトと戦略の観点から見ると、Axisのデータ能力は現在、2つの方向へ同時に拡張しています。
一方では、より多くのシーン、アセット、レイアウト、視覚的なバリエーションをカバーすることで、データの多様性を高め続けています。
もう一方では、タスクの複雑性も高めています。
より長時間にわたるタスク、より高度な行動へとデータを進化させており、そこでは推論、協調動作、失敗からの復帰といった能力が求められます。
1
25
6/6
つまり、Axisはより価値の高いデータ分布を構築しています。
単一ステップの動作から複数段階のタスクへ。
片腕での操作から両腕の協調動作へ。
そして、単一のロボット形態から、異なるロボット形態への適応へ。
この方向性により、Axisはより複雑で、現実的で、汎用性の高いロボット知能を支えるデータインフラに近づいています。
23
AxisroboticsJP retweeted

Isang napakalaking tagumpay para sa buong komunidad ng @axisrobotics ! 🎉
Ang pag-abot sa 1 Milyong Trajectories sa @base ay patunay ng dedikasyon, inobasyon, at sama-samang pagsisikap ng team at komunidad. Nakakatuwang maging bahagi ng paghubog ng kinabukasan ng Physical AI at robotics.
#AxisRobotics #axisroboticsph #Robotics

18
17
30
982
AxisroboticsJP retweeted

Jun 3
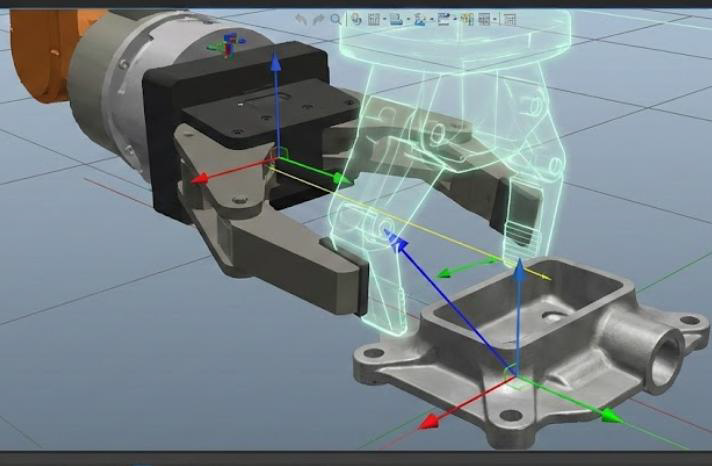
For example, the images below show a real on-site deployment scenario at one of our manufacturing customers.
If we want to help them achieve a scalable, end-to-end “pick-anything” solution, the process is non-trivial. We need to collect large-scale data across their diverse SKUs and part geometries, train a model that can generalize across variations, and then deploy it onto the real production line.
From there, we continue collecting real-world feedback data to fine-tune the policy in production. The goal is to progressively improve stability, cycle time, and accuracy — ultimately delivering a system that is faster, more reliable, and production-ready.



Jun 3

I'm very interested in the Task Packages section. Does the team have any demos or detailed documentation for manufacturing businesses? I'd like to learn more.
This closed-loop system solves a major pain point regarding data quality. Wishing the team continued success in compound moat!
41
30
98
5,839
AxisroboticsJP retweeted

Jun 4
1/ We’re doubling down on teleop-in-sim data capture. SN/04 is now live on BitRobot with @axisrobotics.
Early users will get private access to train robots and earn rewards across both ecosystems.
Comment “gbot” if you want fast-track access ↓
570
176
419
25,721
AxisroboticsJP retweeted
Jun 5
We recently launched a new set of robotic data collection tasks, with a focus on long-horizon tasks (LH) and cross-embodiment tasks (Multi Embodiment). These include bimanual teleoperation and task adaptation across different robot morphologies.
Why this matters:
1. Axis is moving toward more complex, real-world robotic tasks.
2. Long-horizon tasks make complex data collection more scalable in simulation.
3. Staged checkers turn long tasks into clearer training signals.
4. Cross-embodiment tasks help Axis support multiple robot forms and control modes.
5. Axis is improving both the diversity and complexity of data.
6. The goal is not just more data, but more valuable data.
Details below. 🧵
78
46
195
14,974