
Joined April 2022
- Tweets 763
- Following 294
- Followers 690
- Likes 2,716
120 Photos and videos






Andrew Lamichhane retweeted

May 23
19巻発売してます!
よろしくお願いします!
#ブルーピリオド

May 21

.˚⊹⁺‧┈┈┈┈┈┈┈┈┈┈┈┈‧⁺ ⊹˚.
ブルーピリオド⑲巻
🎊 本 日 発 売 🎊
.˚⊹⁺‧┈┈┈┈┈┈┈┈┈┈┈┈‧⁺ ⊹˚.
コビケン編、最高潮✨
世田介と仲良しな岡本くんがカバーを飾ります🐇
🎨単行本情報:kodansha.co.jp/comic/product…
🎨1話試し読み:comic-days.com/episode/13932…
2
240
2,157
111,034
Andrew Lamichhane retweeted

May 11
Yo bro its just chess 🙏😭
133
3,650
82,562
893,021


Gonna try out imitation learning with lerobot, for now I've setup mujoco and a few helper functions, will look into forward and inverse kinematics tomorrow.
52
I've never had this much fun playing Elden Ring Nightreign with the boys, it's a peak game, but it's kinda disappointing that it's not getting updates anymore.
I've started playing a few mods and it's insane to see what modders can really do.
1
38
This week's focus
1. Finish the GPT-2 paper (read the BPE paper last week)
2. Complete my ROS2 UR5 simulation sorting task
3. Figure out how to properly model Gymnasium environments
4. Hopefully get back to the gym (that minor injury slowed me down)
29
We can finally retire the 'Java is too slow' meme.
It's 2026 and Netflix is running 3,000–4,000 production services on Java with near-zero GC pauses
Amazing talk!
youtu.be/ucJTPda_zx0
59

Apr 27
When interview is coming up, it seems so hard to focus on any other thing, had to pause all my projects
1
22
Apr 24
Fixed the issue. Turns out it was a Gazebo sim bug: camera_info follows the REP 103 standard, but point cloud generation in Gazebo sim doesn’t.
There are two possible approaches:
1. Use a additional frame to make it align with rep 103
2. Use depth_image_proc(i chose this one)
Apr 22

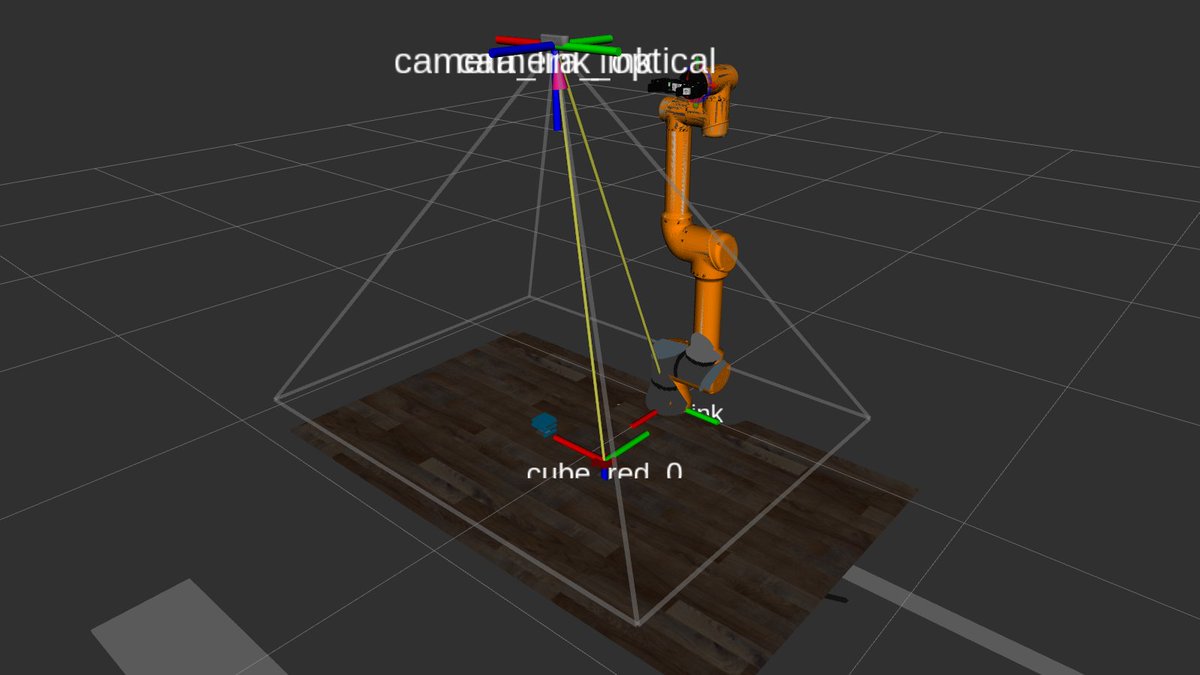
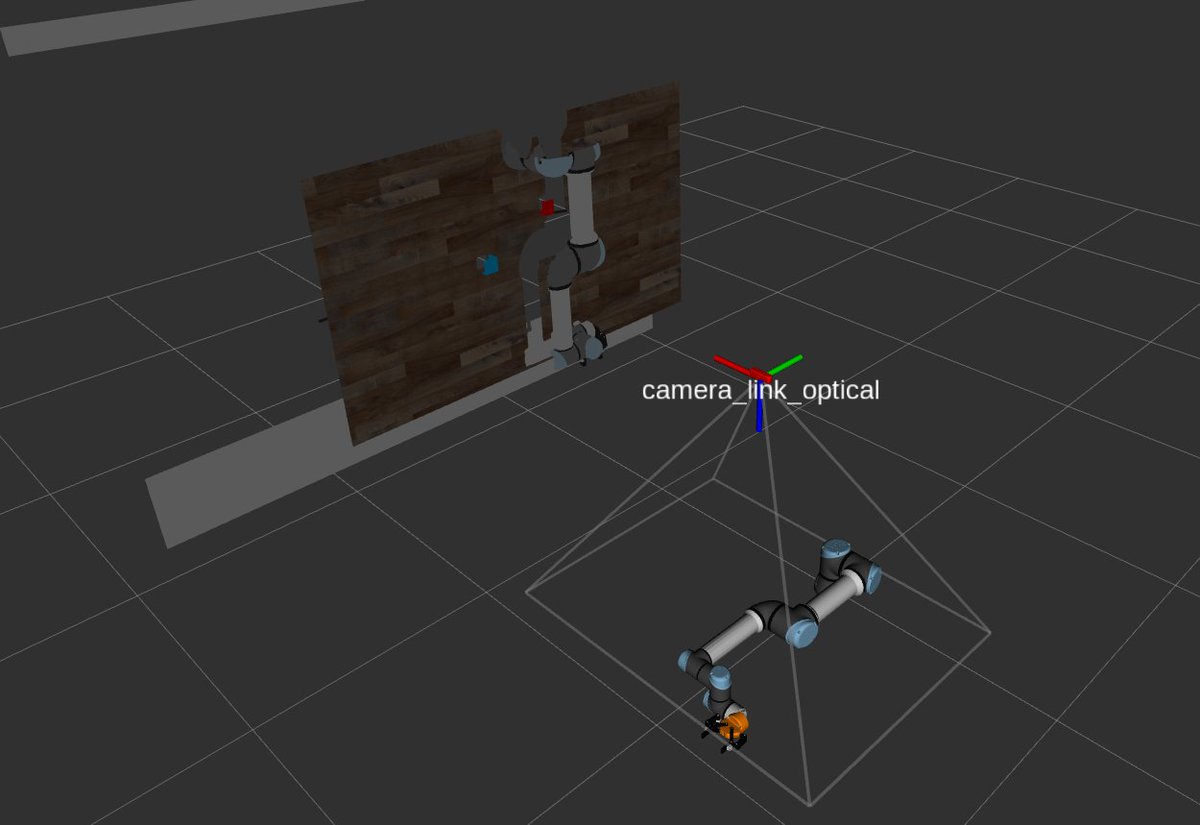
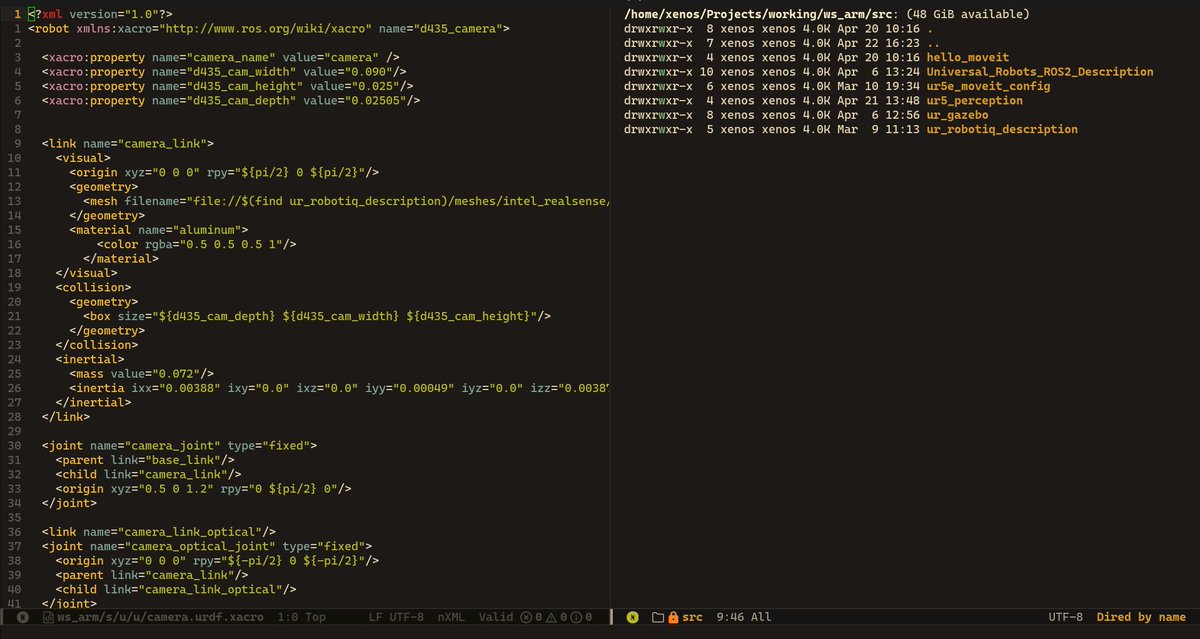
Okay i don't understand why this is happening, i set the camera according to rep 103(z forward[points to the scene], x right, y down)
35
Apr 22
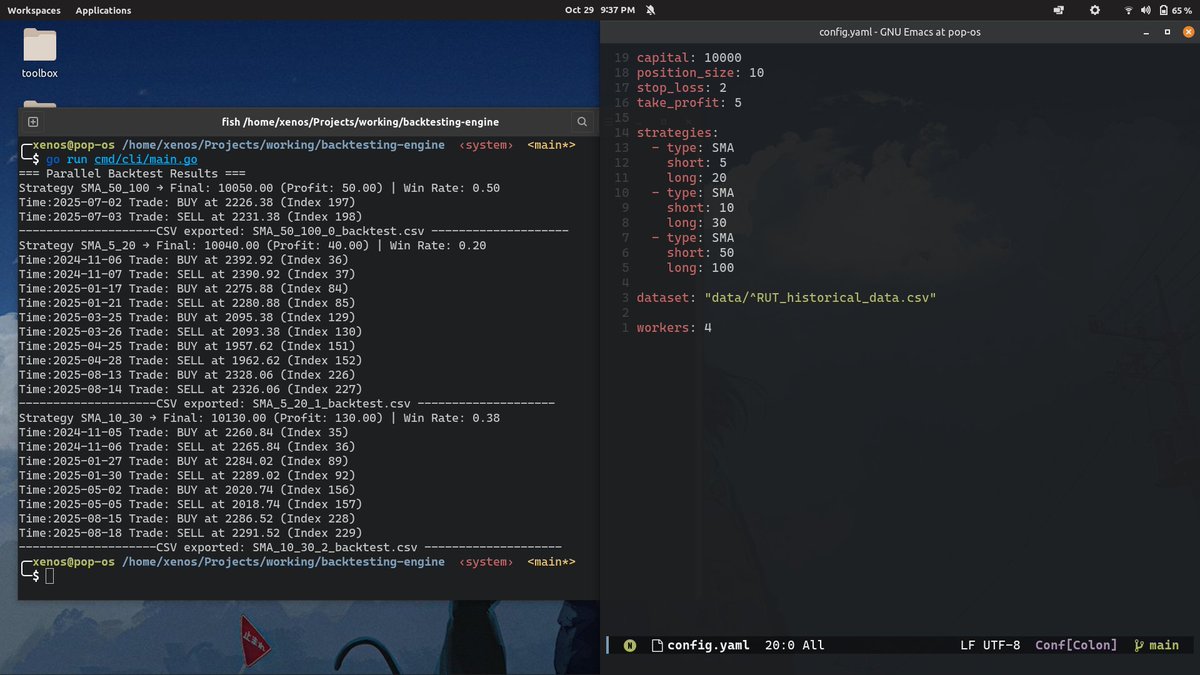
Buh my emacs theme is generated by claude and the image by chatgpt, i freaking love it
1
59
Apr 22
Okay i don't understand why this is happening, i set the camera according to rep 103(z forward[points to the scene], x right, y down)
81
Apr 18
I don't think i'll be doing anything other than fixing my emacs config this weekend
22
Andrew Lamichhane retweeted

Apr 17
51
217
3,564
125,058
Apr 16
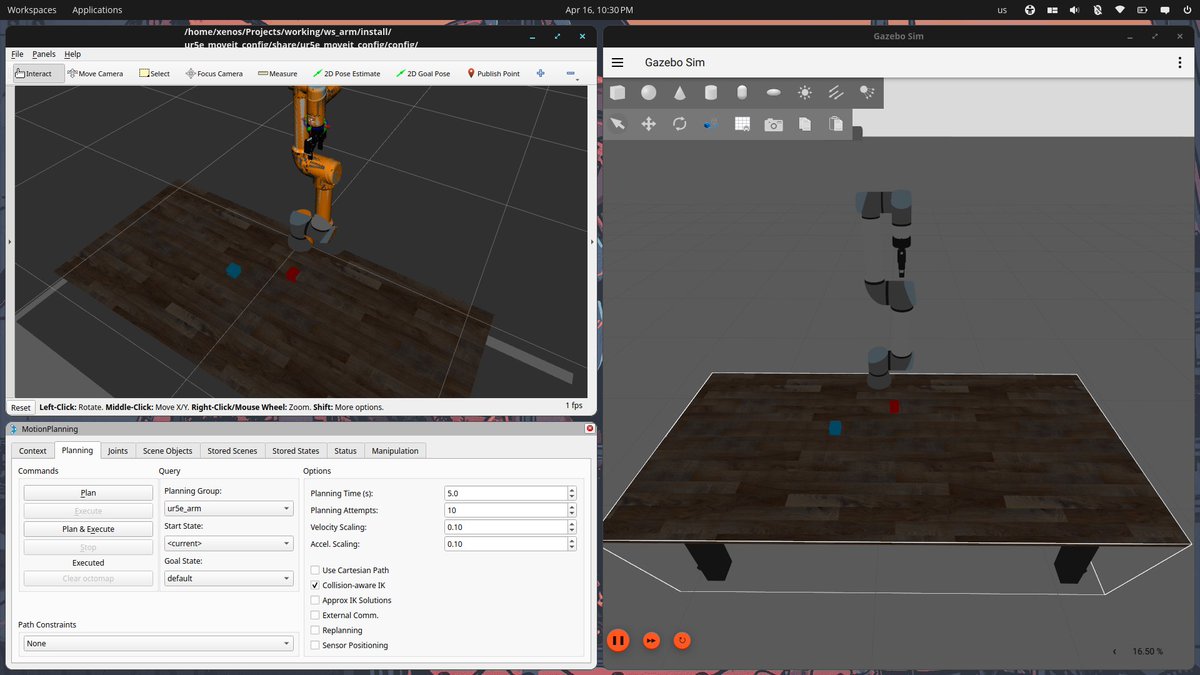
Set this up a while ago, but switching to the new Gazebo Sim from Classic has been a real hassle.
I want to learn proper pick-and-place with the arm and eventually do Tower of Hanoi. Tried something similar in Humble but never finished it, so this time I’m documenting it as i go.
34
Apr 16
Day 2 of working on my personal agent for fun
Spent a good chunk of the day debugging a streaming issue in llama.cpp
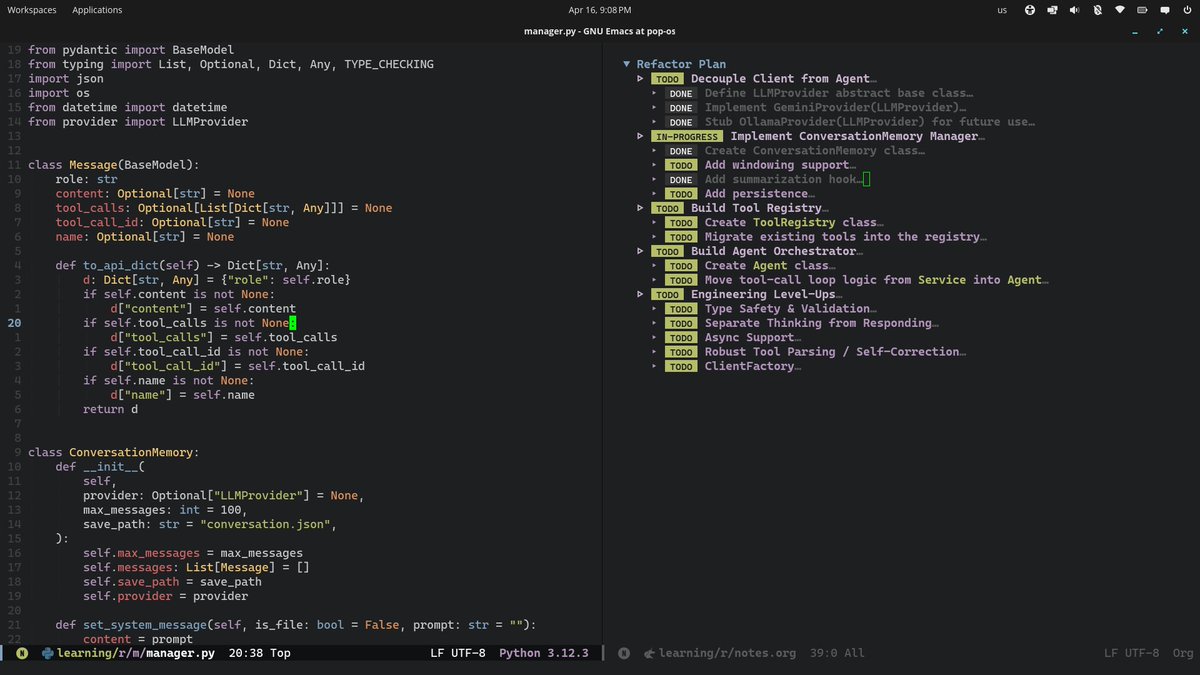
built a simple but functional memory manager from scratch. It handles conversation sessions, message history, and persists everything to a JSON file for now (1/3)
1
32
Apr 16
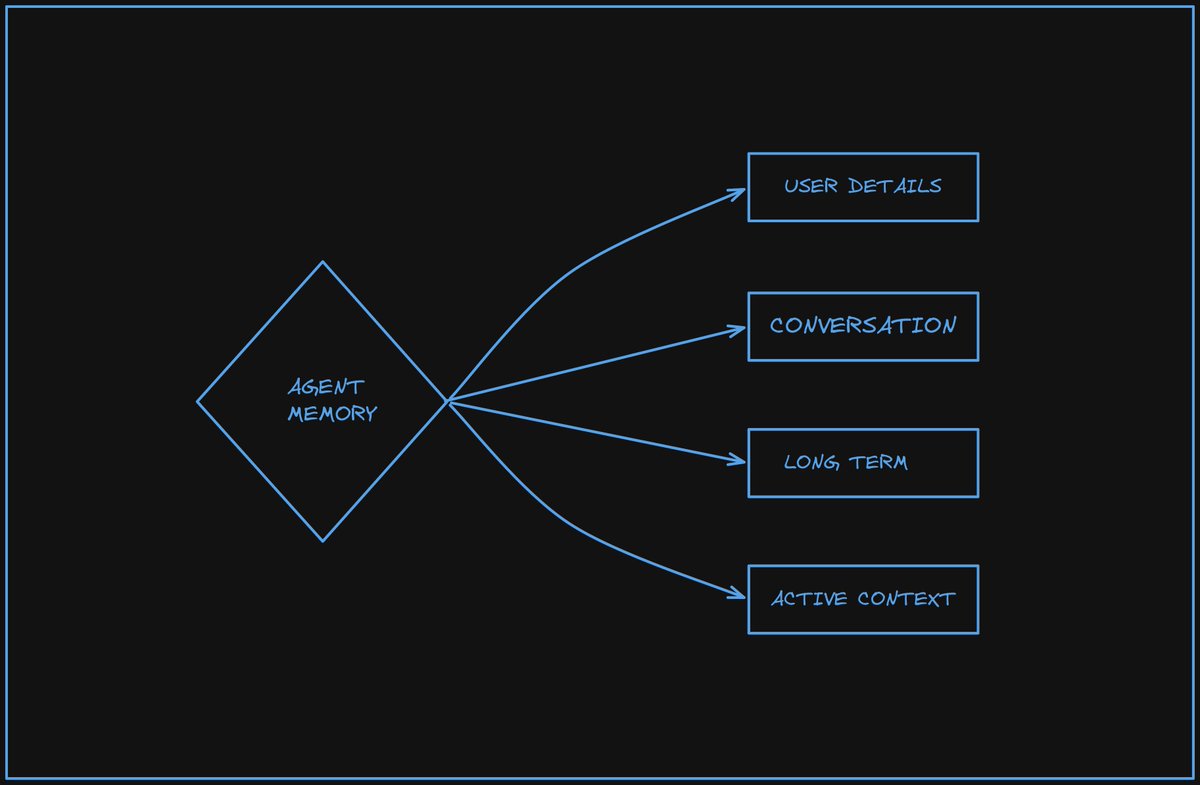
I also sketched out a basic idea of what i want my agents memory to look like :
1. User Details (profile, preferences, background)
2. Conversation (short-term chat history)
3. Long-term (important facts, memories, knowledge)
4. Active Context (what’s currently ongoing)
(2/3)
1
34
Apr 16
I also read Karpathy’s recent post on his LLM Wiki / knowledge base approach and I’m tempted to experiment with it as the core of long-term memory combined with a minimal RAG system.
Anyone else playing with similar memory designs? Would love thoughts.
(3/3)
#buildinpublic
44
Apr 15
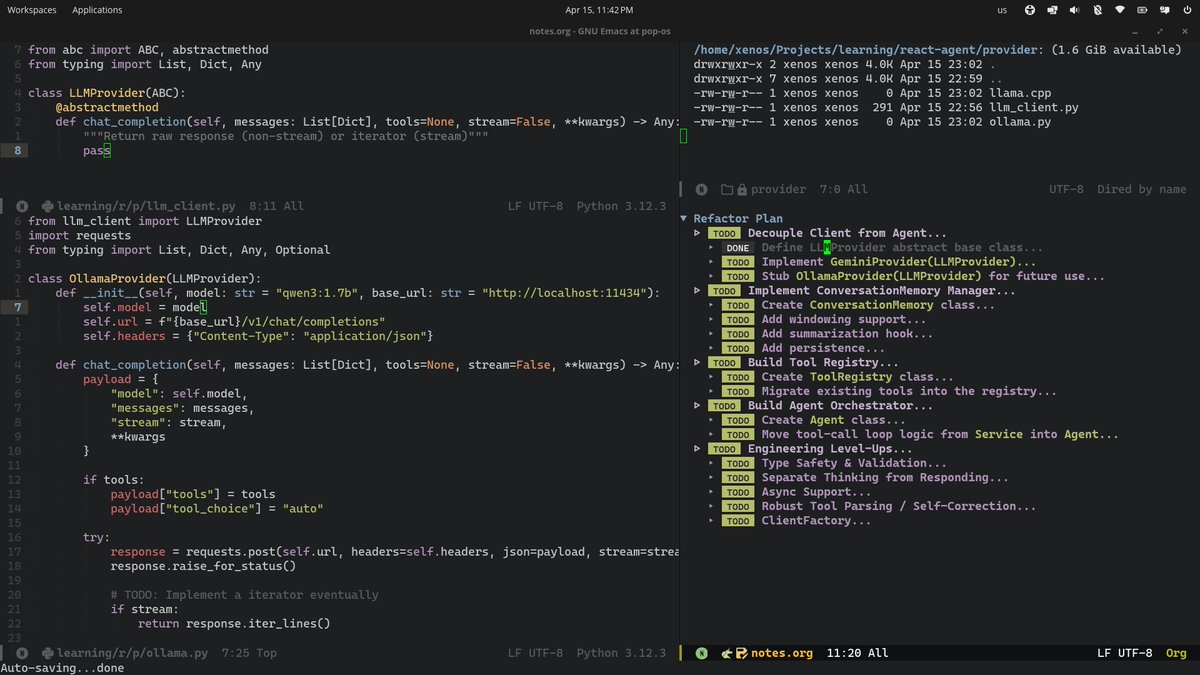
building my own personal ai agent that runs fully local
started from a dnd game i was making with langchain, got curious how it all works, went bare-metal
day 1 provider layer done — Ollama, Gemini & Llama.cpp
#buildinpublic #localai #python
65