
Trying to apply the free energy principle to engineering problems, where 'trying' means: minimizing free energy.
Joined January 2014
- Tweets 213
- Following 674
- Followers 531
- Likes 504
6 Photos and videos
Bert de Vries retweeted

Jun 3
Out now in TMLR! 🚀
We formalize how epistemic priors transform Expected Free Energy minimization into a standard variational objective.
This allows us to frame planning as a continuous variational optimization problem, moving away from combinatorial tree search. 👇
1
1
2
109

Feb 28
I recently had the pleasure to lecture at the Machine Learning Summer School in Melbourne t.ly/hX0Uo on Bayesian Machine Learning → Active Inference.
All materials (slides notebooks) available at github.com/bertdv/mlss-2026 . Thread below 👇
1
2
7
520
Feb 28
Finally: Active Inference (AIF). AIF extends BML to embodied agents with a full commitment to variational inference for state estimation, learning, planning, and control. See t.ly/zcSdH
1
91
Feb 28
The result: a principled framework for embodied, agentic AI — robots, drones, and autonomous systems that perceive, learn, and act on-the-fly in real time.
73
Bert de Vries retweeted
28 Aug 2025
This is what we ask ourselves in our latest paper (arxiv.org/abs/2508.02197), where we solve Minigrid environments with Active Inference. (Spoiler, it works!)
Code available at github.com/biaslab/EFEasVFE
Done together with @mlmykola , @ThijsvdLaar and @bertdv0
1
2
5
282
Bert de Vries retweeted
28 Aug 2025
What's even nicer: because our method injects priors locally, everything still works within @ReactiveBayes ' RxInfer.jl using message passing. Special thanks to my colleagues at @LazyDynamics for making this possible!
1
4
217
Bert de Vries retweeted
28 Aug 2025
In Active Inference, a lot of time is spent on computing Expected Free Energy. What if we could tweak the generative model such that EFE can be minimised with traditional variational inference methods?
1
3
6
389
Bert de Vries retweeted

7 Jul 2025
Backed Trojan Robotics (Team 24090) at the FIRST® Tech Challenge European Premier Event in Eindhoven (July 1–5) . They hustled—coding, building, troubleshooting—and came away with 3rd in the Think Award. Proud to support their next steps. 🚀 #FTC #Robotics #STEM


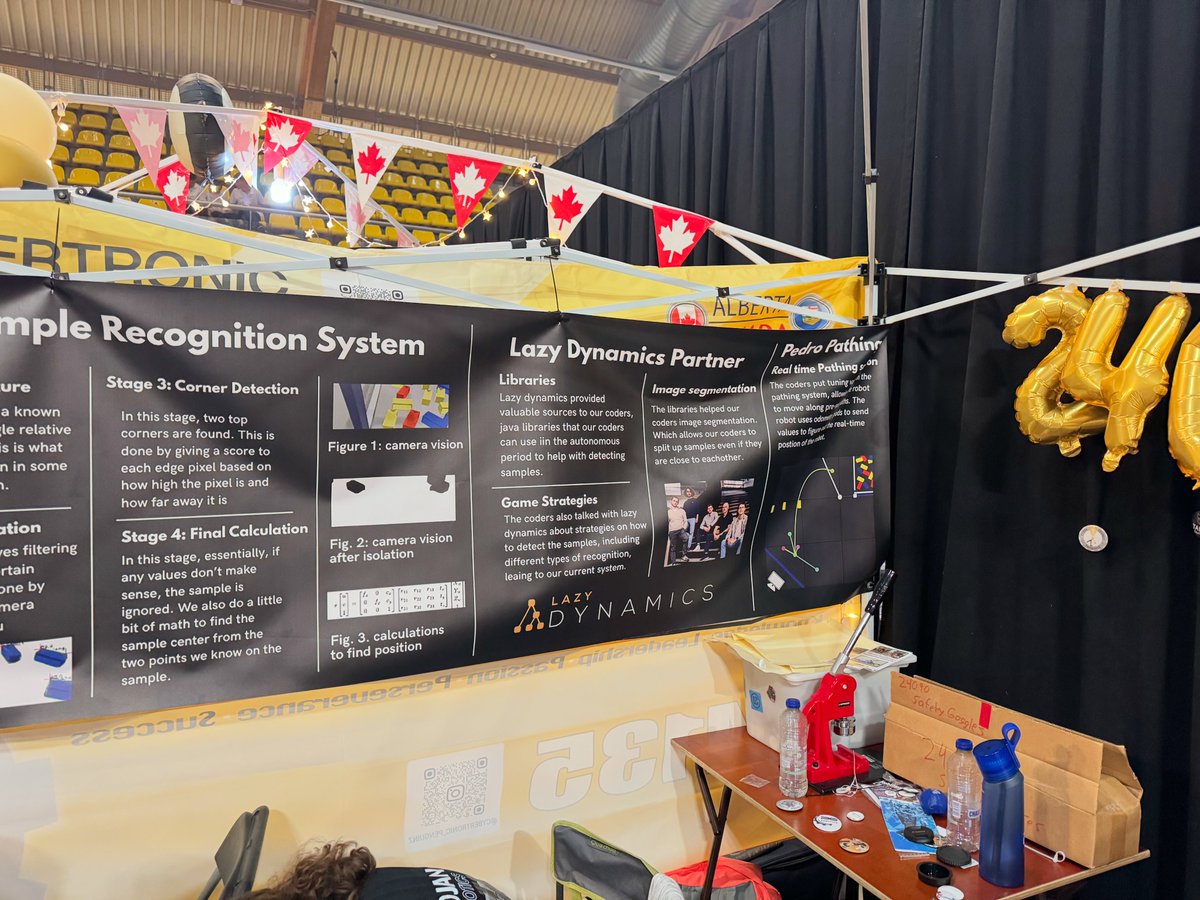

1
2
311
11 Jun 2025
Agreed with @fchollet on FEP (t.ly/s4gMV), but FEP is more than a pretty good idea, and there are more benefits to realizing an agent as an active inference (AIF) process beyond active data selection. I will mention a few below:
1
9
25
1,553
11 Jun 2025
(6) Finally, FEP is more than a pretty good idea as it can be derived from first principles by information theory, see e.g., blog at t.ly/Bl2DO plus refs. An AIF process avoids ad hoc design choices often found in man-made AI algorithms.
1
1
5
282
11 Jun 2025
Some more refs: for implementation, rxinfer.com (toolbox), and arxiv.org/abs/2504.14898 (AIF planning as inference), and lazydynamics.com (company). Also check out noumenal.ai , stanhopeai.com, and verses.ai .
5
269
Bert de Vries retweeted

14 May 2025
That is 🤯
14 May 2025

🚀 What do Bayesian inference and skydiving have in common? Both demand trust under uncertainty. Our CTO @bvdmitri used RxInfer to clean up noisy pose estimates from his 500th skydive — showing how probabilistic inference fills the gaps where standard ML fails #Bayes #Skydiving
1
6
343