










If you ever felt disappointed walking into a humanoid robotics event seeing robots that move like awkward puppets, or by watching demo videos full of staged actions that don’t reflect real-world capability…
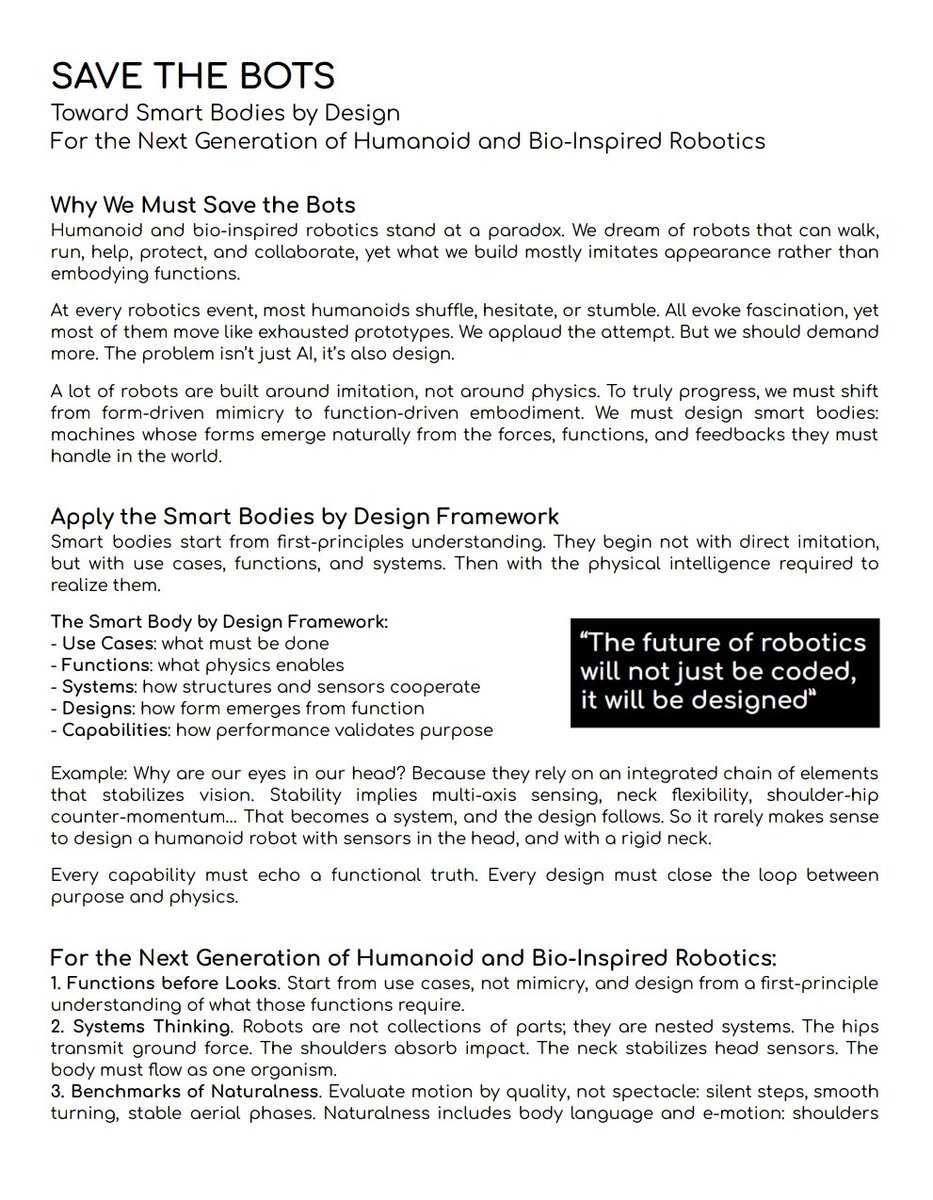
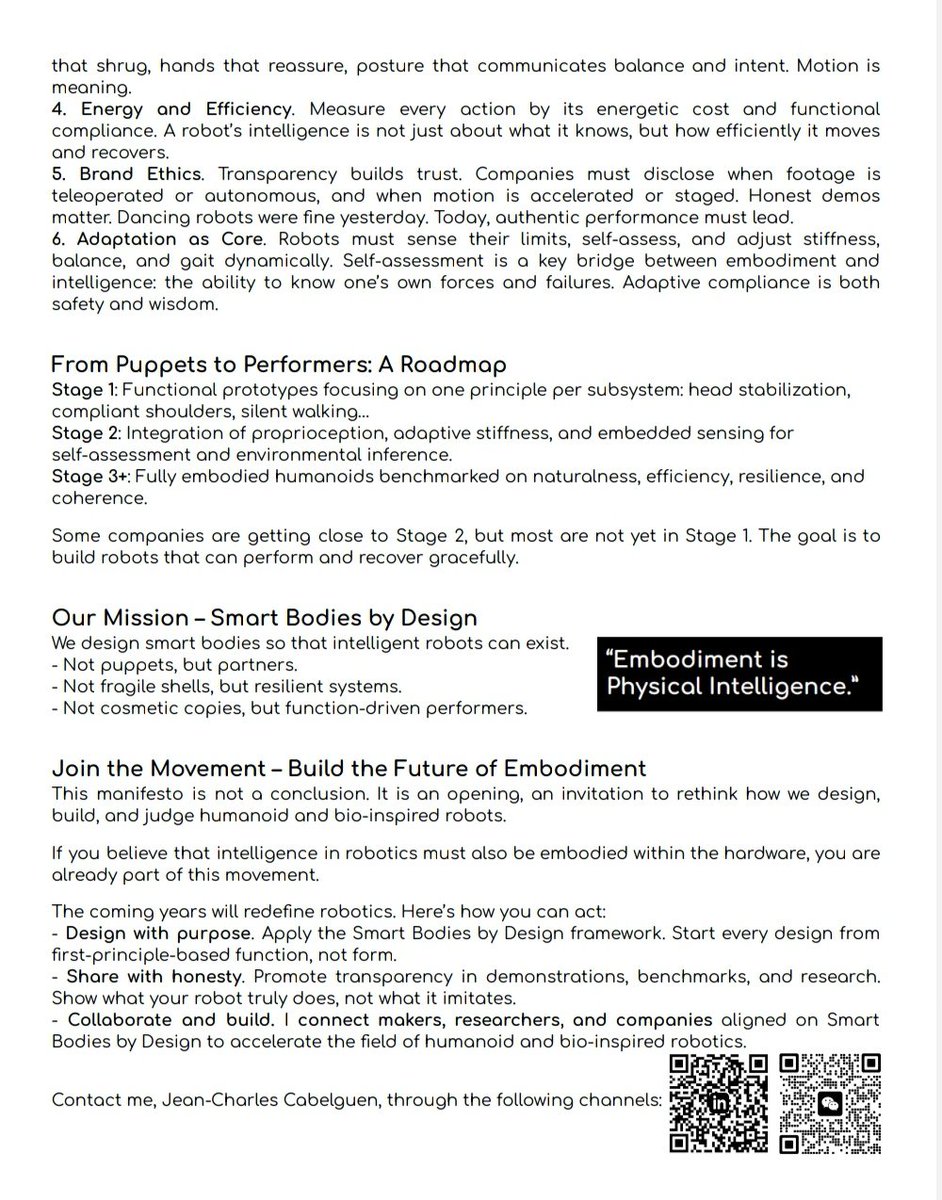
Then take a look at the Save The Bots Manifesto. It’s a call to build robots that move with physics, not against it.
"The future of robotics will not just be coded, it will be designed"
DM to continue the conversation.
#Robotics #humanoidrobot #humanoidrobotics
@GoingBallistic5 @tom_jiahao
1
10
771
Articles from @VitalikButerin are always intructive. This one, on local AI setup, should reach a broad audience vitalik.eth.limo/general/202…
26
JC retweeted

Feb 1
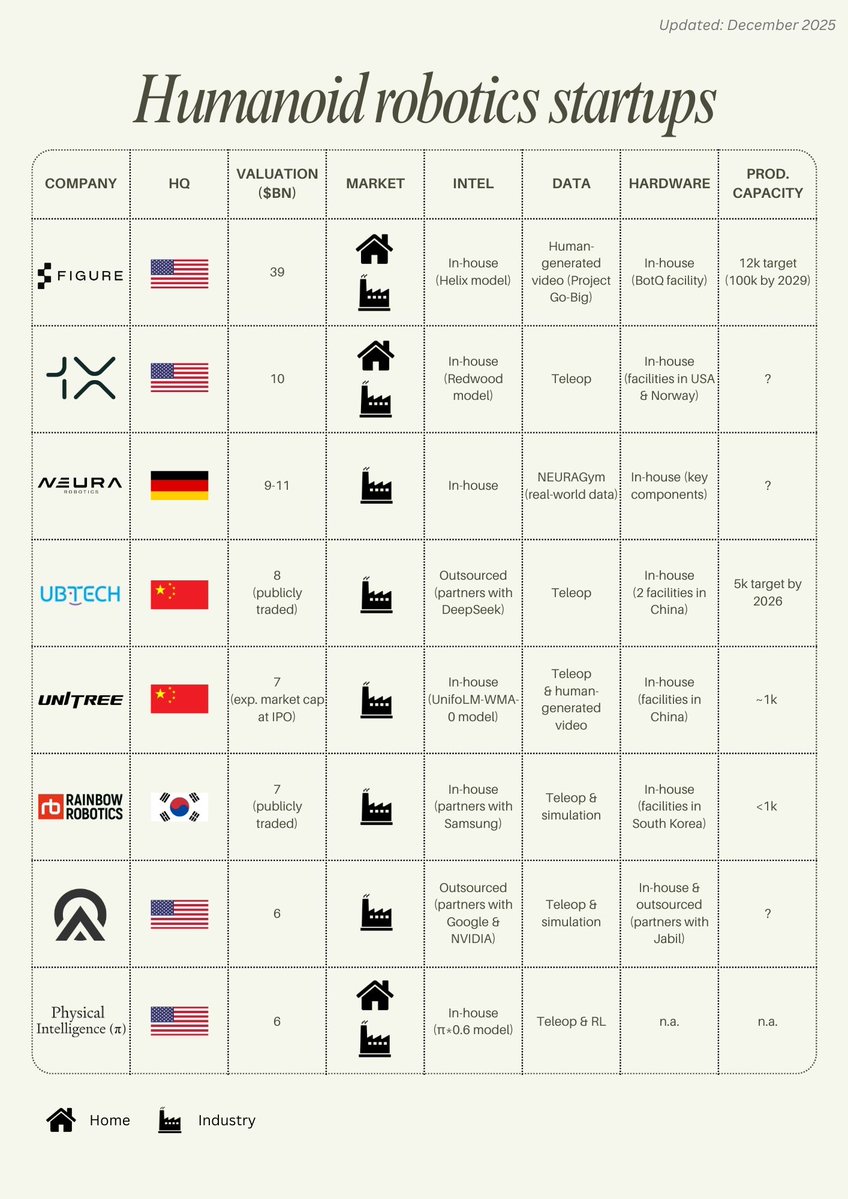
1/ General-purpose robotics is the rare technological frontier where the US / China started at roughly the same time and there's no clear winner yet.
To better understand the landscape, @zoeytang_1007, @intelchentwo, @vishnuman0 and I spent the last ~8 weeks creating a deep dive on humanoid robotics hardware and flew to China to see the supply chain firsthand.
Here's everything we've created our takeaways about the components, humanoid comparisons, supply chains, and geopolitics👇
71
255
1,828
831,940
JC retweeted

Jan 27
Meet Sprout.
Today, we’re releasing a new kind of robotics platform. One designed to move out of the lab and into the real world, closer to the people who will shape what robots become next. [1/4]
136
188
1,670
281,466
JC retweeted

Jan 20
An open-source, DIY humanoid so that people can get started developing their own much faster

Building humanoids just got a whole lot easier. 🤖🛠️
Roboparty has officially released the full-stack source code and hardware blueprints for their Roboto_Original bipedal robot. This isn't just another GitHub repo—it’s a complete roadmap designed to slash development costs by a projected 80% and turn "secret sauce" into shared infrastructure.
➤ High-Performance Specs: Standing 1.2m (3.9ft) and weighing 30kg (66lbs), this bot hits a running speed of 3m/s (6.7mph). It features an auto-grade structure and modular joints, proving open-source hardware can absolutely compete at a top-tier level.
➤ The Ultimate Dev Kit: They’ve opened up everything: full structural drawings, EBOMs, a supplier list, and even their AMP motion control algorithms. It even supports SMPL-X to leverage human motion capture data, making gait training way more efficient.
➤ No More Reinventing the Wheel: By sharing their Sim2Real gap solutions and a "Know-how" knowledge base, Roboparty is helping the community skip the trial-and-error phase. The goal is to move from "showy stunts" to actual real-world utility.
➤ Ready to fork the future? Check out the resources:
GitHub: github.com/Roboparty/roboto_…
Gitee: gitee.com/roboparty/roboto_o…
Docs: roboparty.com/roboto_origin/…
Source: Roboparty
#HumanoidRobots #OpenSource #EmbodiedAI #Roboparty #Robotics #BuildInPublic
4
5
90
7,815
JC retweeted

Jan 5
NEWS: Boston Dynamics has just released a new video of its upgraded next-generation humanoid robot called Atlas.
• 4 hour battery. Self-swappable for continuous operation
• 6 feet 2 inches tall
• Weight: 198 lbs
• 56 total degrees of freedom
• Now fully electric, ditching older hydraulic systems
• New lightweight mix of aluminum and titanium components
• 110 lbs weight capacity (66 lbs sustained)
• Can reach up to 7.5 ft
• Constantly evaluates its surroundings and adjusts its posture, balance, and grip in real time
• Hands that can reconfigure as needed. Tactile sensors feed data back into the system, helping apply the right amount of force
• Brain is powered by Nvidia chips
989
3,055
20,753
2,438,160
JC retweeted
Jan 3
A great example of a robot that has absolutely no use being humanlike

Dexterous hands make the difference in lunar construction.
It’s logistics plus assembly, not just driving.
Here’s our Centaur-style rover unloading cargo and putting solar panels together, step by step. Demo from a lunar test field.
Join the team: grnh.se/k4q7j83y8us
3
5
58
7,708

JC retweeted

23 Dec 2025
What are the odds that Disney robots make it into the home first?
23 Dec 2025

Deep dive into Disney’s self-roaming Olaf robot ❄️
Scott @GoingBallistic5 and I discussed the intentional design choices behind Olaf.
Full video: youtu.be/v3KDNKeU624?si=-u1_…
3
4
42
3,771
Here is the fundamental switch pushed by @tom_jiahao (quote from his article): "Instead of minimizing degrees of freedom or simplifying hardware to make control easier, we take the opposite approach. We give the system as much actuation, redundancy, and sensing bandwidth as practical, then let artificial intelligence exploit that expressiveness. A high dimensional hand has more ways to achieve a goal, more ways to correct errors, and more ways to adapt to new tasks without mechanical redesign. In a world where control algorithms are improving quickly, the opportunity cost of under building the hardware is enormous. The real risk is not in making something too expressive, but in making something that artificial intelligence will eventually outgrow. Our view is that the winning platforms will be the ones whose hardware expands the possibility space for intelligence rather than constraining it." 👌
8 Dec 2025

Wrote a post with some hot takes on dexterity
• Tactile sensing is valuable but misunderstood
• Vision compensates for more than people expect
• Expressive hardware gives AI more room to work
• Biomimicry rarely survives physics
open.substack.com/pub/roboti…
1
2
240
JC retweeted

8 Dec 2025
Wrote a post with some hot takes on dexterity
• Tactile sensing is valuable but misunderstood
• Vision compensates for more than people expect
• Expressive hardware gives AI more room to work
• Biomimicry rarely survives physics
open.substack.com/pub/roboti…
9
15
98
12,465
High-Five Test for humanoid robots:
Can the robot give and receive a simple high-five with smooth dynamics and safe force control?
Why it matters: this tiny interaction reveals compliance (including non rigid shoulders), contact handling, timing, and safety. All critical for robots that must work around humans.
If it can’t high-five, it’s not ready.
1
3
133
This one is not an industry benchmark. But fun to test!
#HumanoidRobotics #SmartBodiesByDesign
23
JC retweeted

25 May 2024
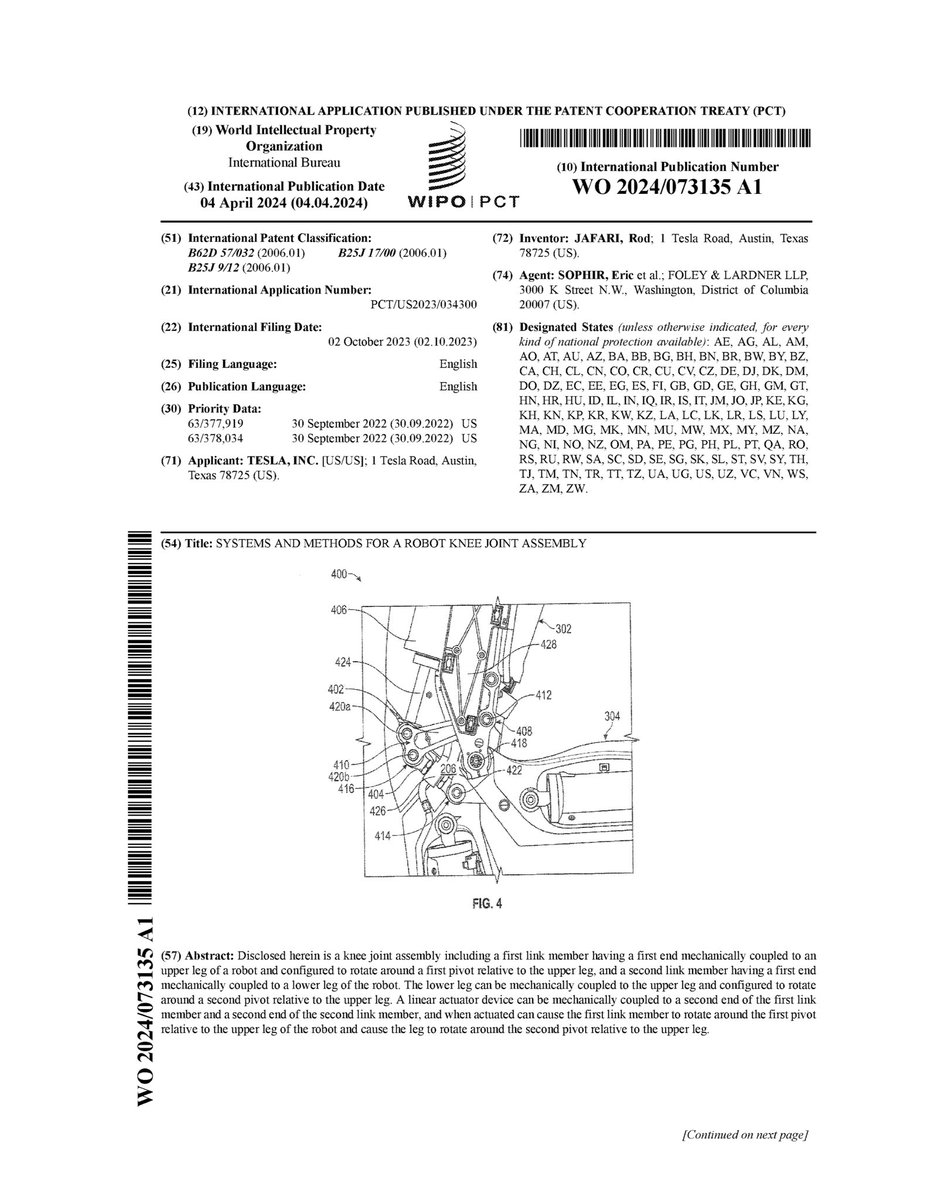
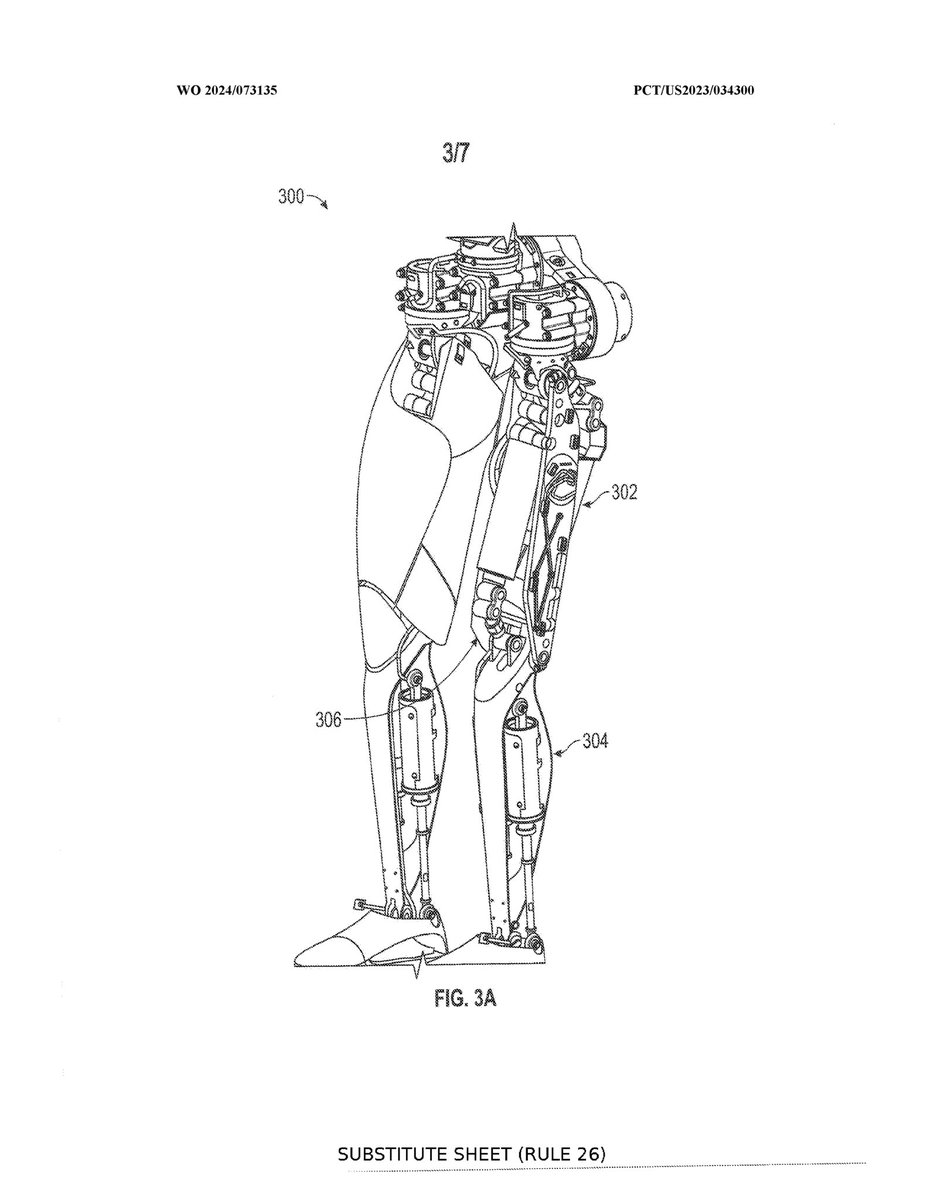
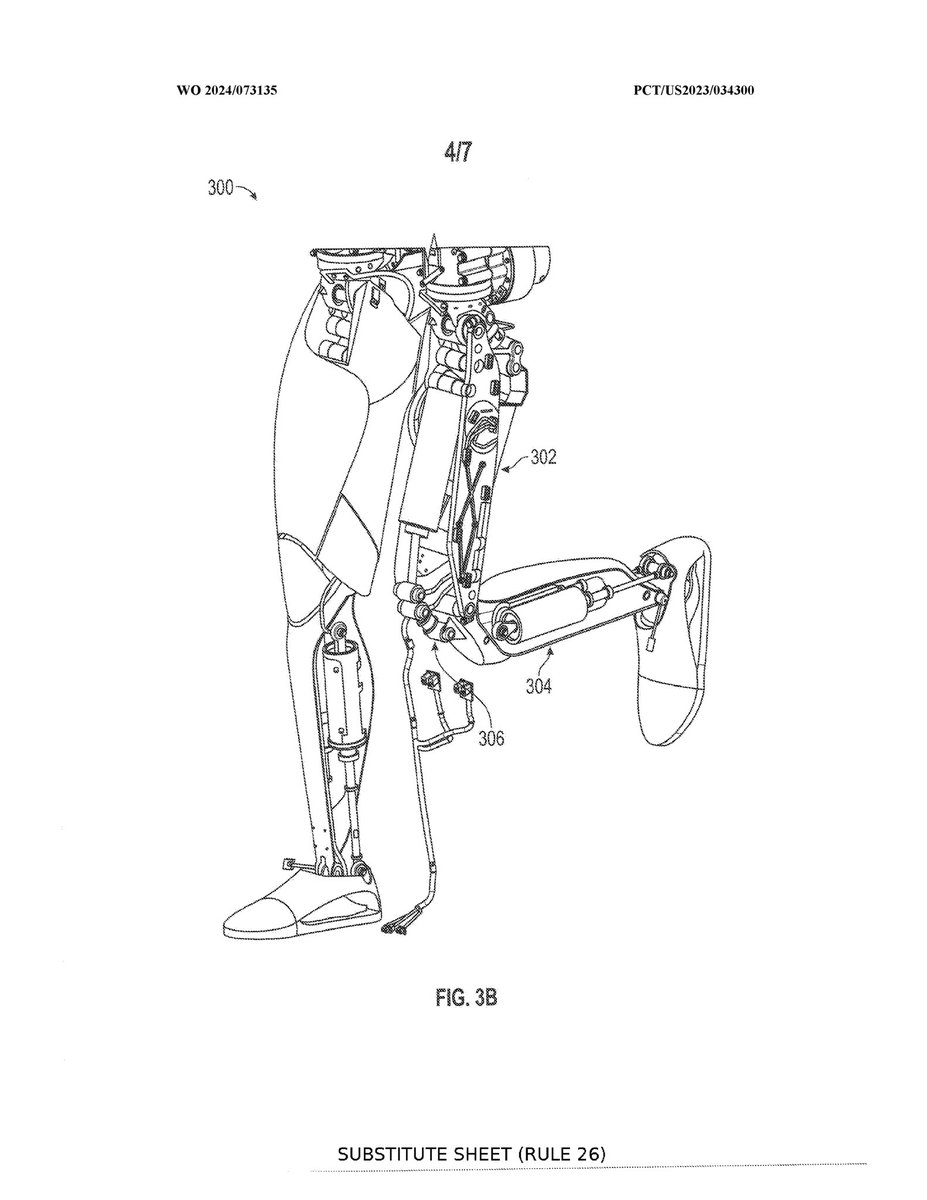
Another patent about the hardware of #Optimus. 🔥
It reveals Optimus's knee joint assembly, which is driven by a linear actuator.
WO2024073135A1
patents.google.com/patent/WO…

13
75
798
12,184,124
Energy/Mass Ratio Test for humanoids:
This measures how much useful work a robot can deliver per kilogram of its own mass.
Why it matters: it exposes actuator efficiency, thermal limits, and structural design. A humanoid with a poor ratio can’t perform real 20-hour/day tasks, no matter how good the demo looks.
1
35
Graceful Failure Test for humanoids:
A well-designed robot should fail smoothly in absorbing shocks, bending safely, or recovering without damage.
Why it matters: real environments are unpredictable. If a robot collapses like a rigid machine, it’s unsafe by design. Graceful failure is the foundation of safe autonomy.
It also invites us to consider the high redundancy paradigm, in which hundreds of sensors or actuators replace the monolithic approach prevalent today.
25
Silent Walk Test for humanoid robotics:
A robot that walks quietly is using its mechanics and sensors correctly: low impacts, smooth force transfer, and natural compliance.
Why it matters: noisy steps are a sign the robot fighting physics and poorly interacting with its environment. Quiet gait reveals real mechanical and sensory efficiency and better long-term reliability.
31