
Check ocp2023.casadi.org for the upcoming Hands-On CasADi course.
Joined December 2014
- Tweets 52
- Following 7
- Followers 217
- Likes 8
8 Photos and videos


CasADi retweeted

9 Jan 2024
Become a CasADi power user - join the second edition of the live master class in Belgium, March 18-20.
ALT Flyer describing the CasADi master class hosted in Belgium March 18-20. The full flyer is available as pdf at https://web.casadi.org/master2024/master2024.pdf
1
2
8
745

24 Sep 2023
No lies detected..


3
393
23 Sep 2023
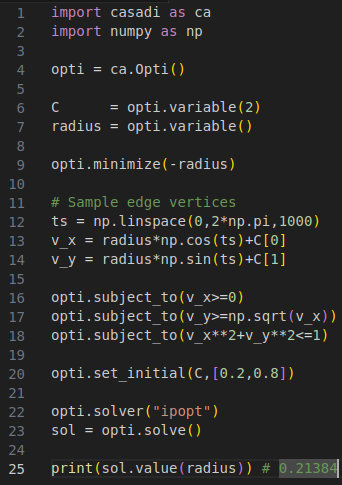
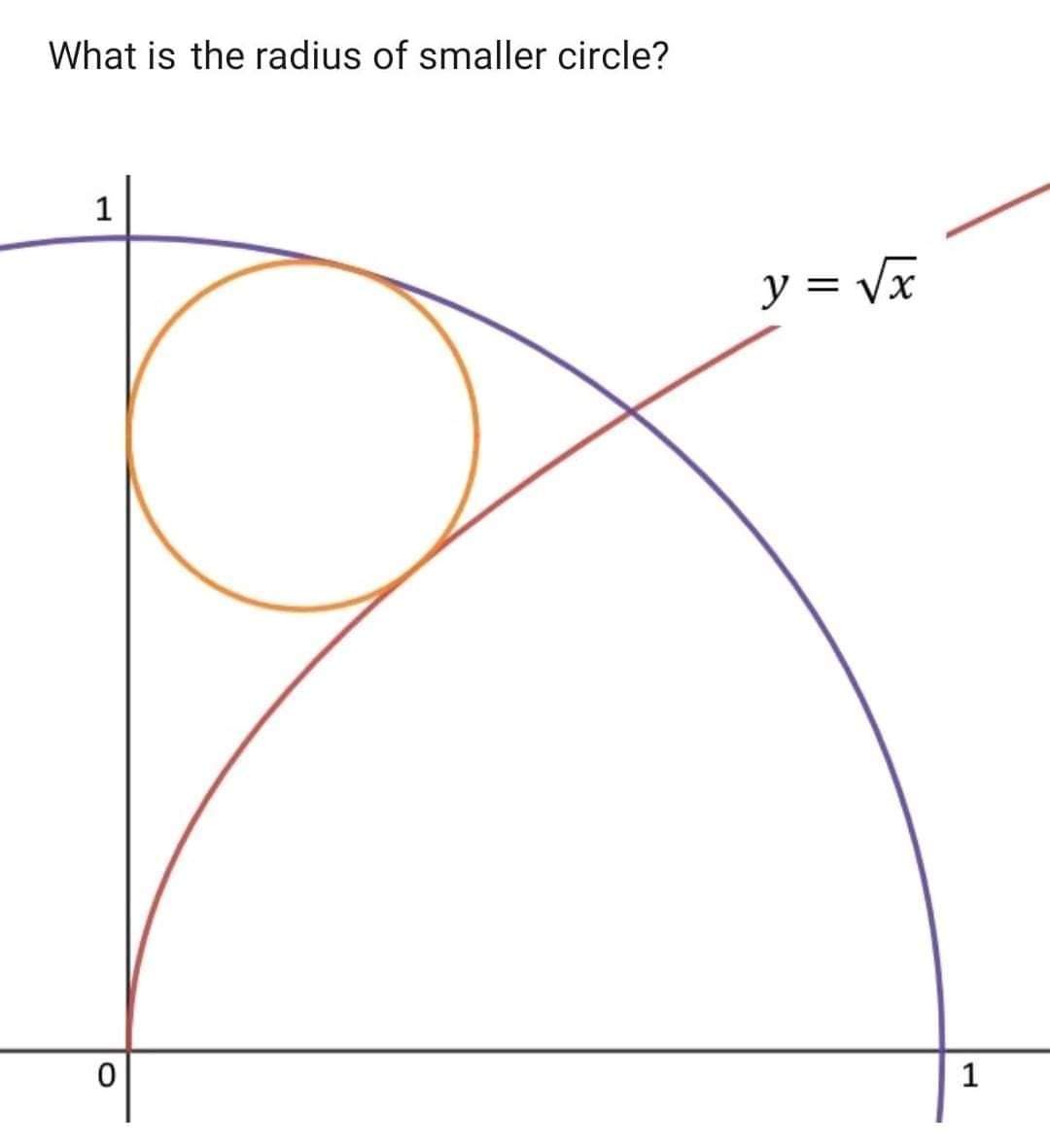
Analytic solutions are overrated, y'all😇
21 Sep 2023

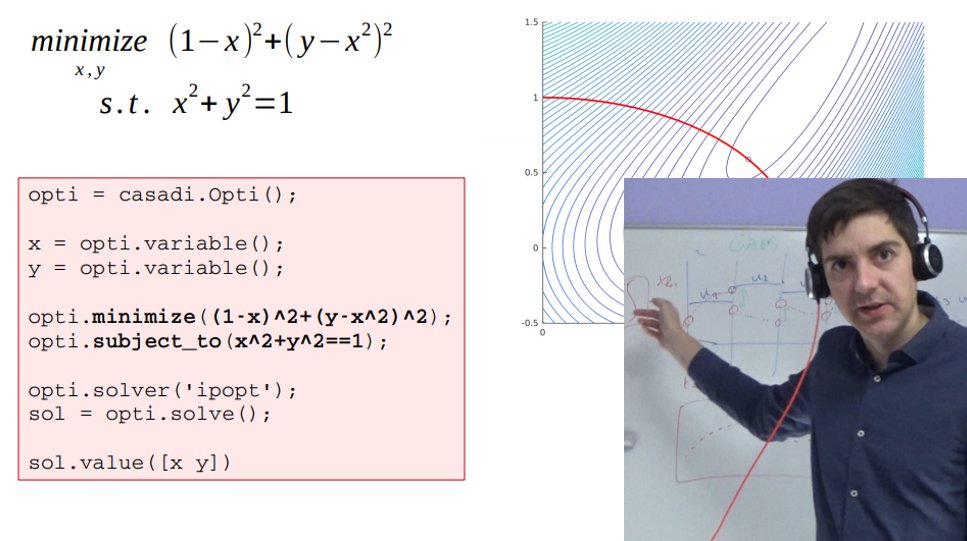
Hiring our first employee today. Gave this insanely hard problem for round 1, try it out if you're free:
23
576
CasADi retweeted
13 Jun 2023
CasADi demo youtu.be/5Fpi_C0w2lg - feel like deep-diving in a hands-on workshop? Early bird registrations for ocp2023.casadi.org are still open for two weeks.
5
14
1,061
CasADi retweeted

22 May 2023
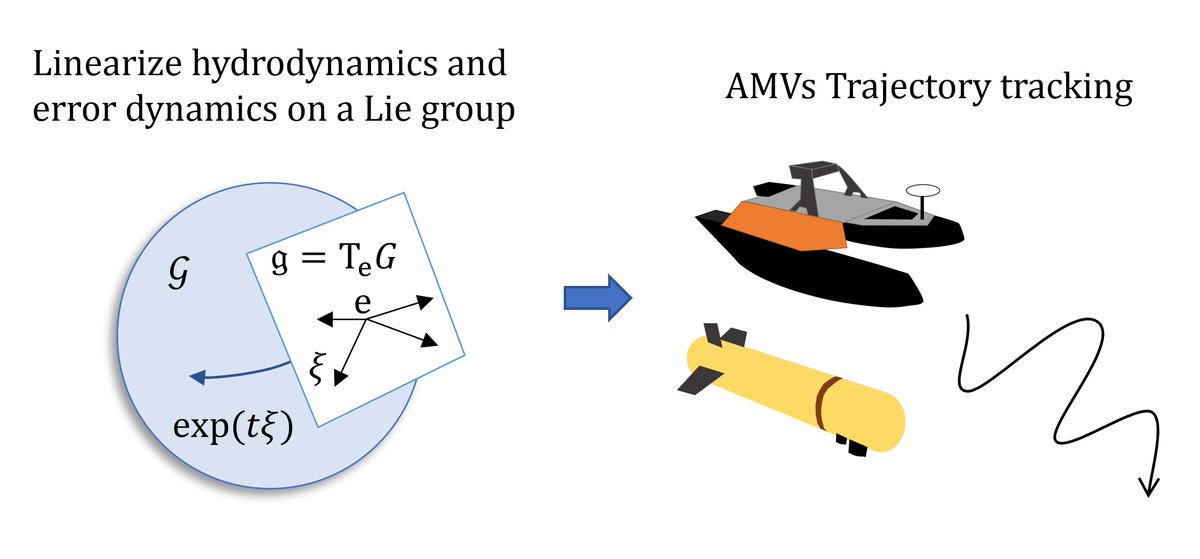
We propose a computationally-efficient Convex Lie Algebraic MPC for marine vehicles. The higher water density leads to significant environmental forces and state-dependent vehicle models. The proposed MPC significantly reduces computation time, enabling real-time implementation with longer planning horizons.
Paper: arxiv.org/abs/2305.09009
Code: github.com/UMich-CURLY/Lie-M…
1
16
144
17,449
CasADi retweeted

17 Apr 2023
FMI 3.0 and 2.0 added in @casadi_software
- FMI export is currently FMI 3.0
- FMI import is currenlty FMI 2.0

2
4
423
CasADi retweeted

27 Feb 2023
With Real-time Neural MPC you can efficiently integrate large, complex neural network architectures as dynamics models in an MPC-pipeline. Compared to prior implementations we can leverage neural networks with a 4000x larger parametric capacity in a 50Hz real-time framework.

ALT Quadrotor overflying a table in close proximity to the plane. Our approach can model the aerodynamic effects in close proximity to the ground, substantially limiting the horizontal tracking error.
4
29
256
40,297
CasADi retweeted

18 May 2022
Check out our ongoing research: lightweight, model based, optimal trajectory planning for autonomous vehicles powered by #Rockit and #CasADi (@casadi_software) applied to drone racing for our paper at #AMC2022: ieeexplore.ieee.org/document…
#autonomousvehicles #uav #drones #control
2
3
28 Nov 2021
2
CasADi retweeted

2 Aug 2021
First set of simulations: takes ~10 months to converge w/ good results
Second set of simulations on new data: takes ~12 hours to converge w/ great results on a first pass. Call me the CasADI master now.
I'm taking that as a win!! @JohnRHutchinson #DAWNDINOS
1
14
29 Jul 2021
Impressive usage of CasADi..
22 Jul 2021

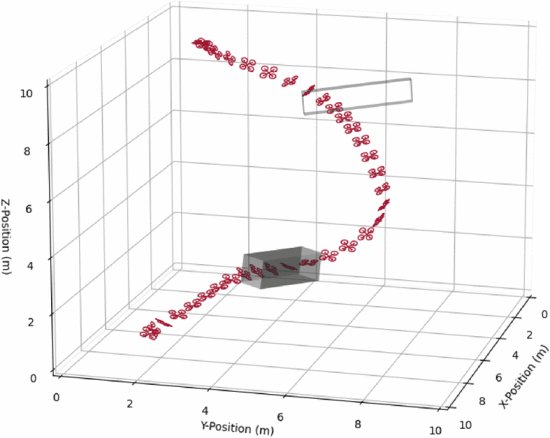
We are excited to announce our latest paper in Science Robotics on agile flight allowing us to generate "time-optimal quadrotor trajectories" that are faster than human #FPV #droneracing pilots! Paper: rpg.ifi.uzh.ch/docs/ScienceR… Full video: youtu.be/ZPI8U1uSJUs
Kudos @foehnph
1
4
CasADi retweeted
18 Jan 2021
The yearly 3-day "Hands-on CasADi course on optimal control" is now available as a self-paced learning experience.
Enroll @ yacoda-training.teachable.co…
2
7
20
CasADi retweeted

2 Oct 2020
With a new CEO and capital increase, 3E's spin-off @DeltaQ_io is more ready than ever to globally reduce commercial buildings’ CO2-emissions up to 40%. Check out the full press release here: bit.ly/33jZ29Q
#innovation #sustainability #proptech #energy

3
6
CasADi retweeted

30 Jul 2020
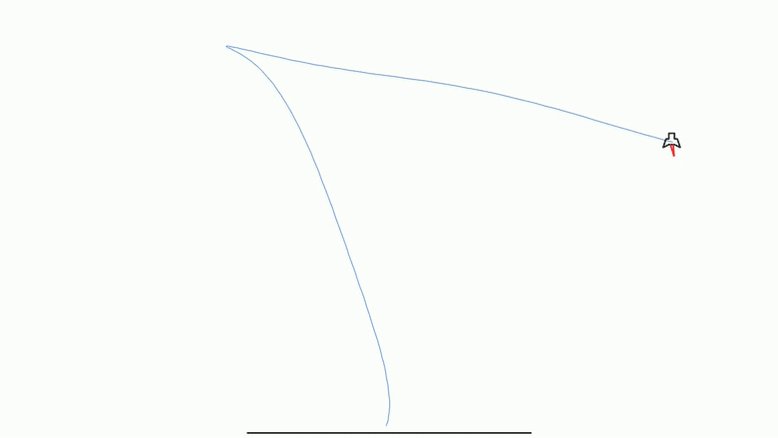
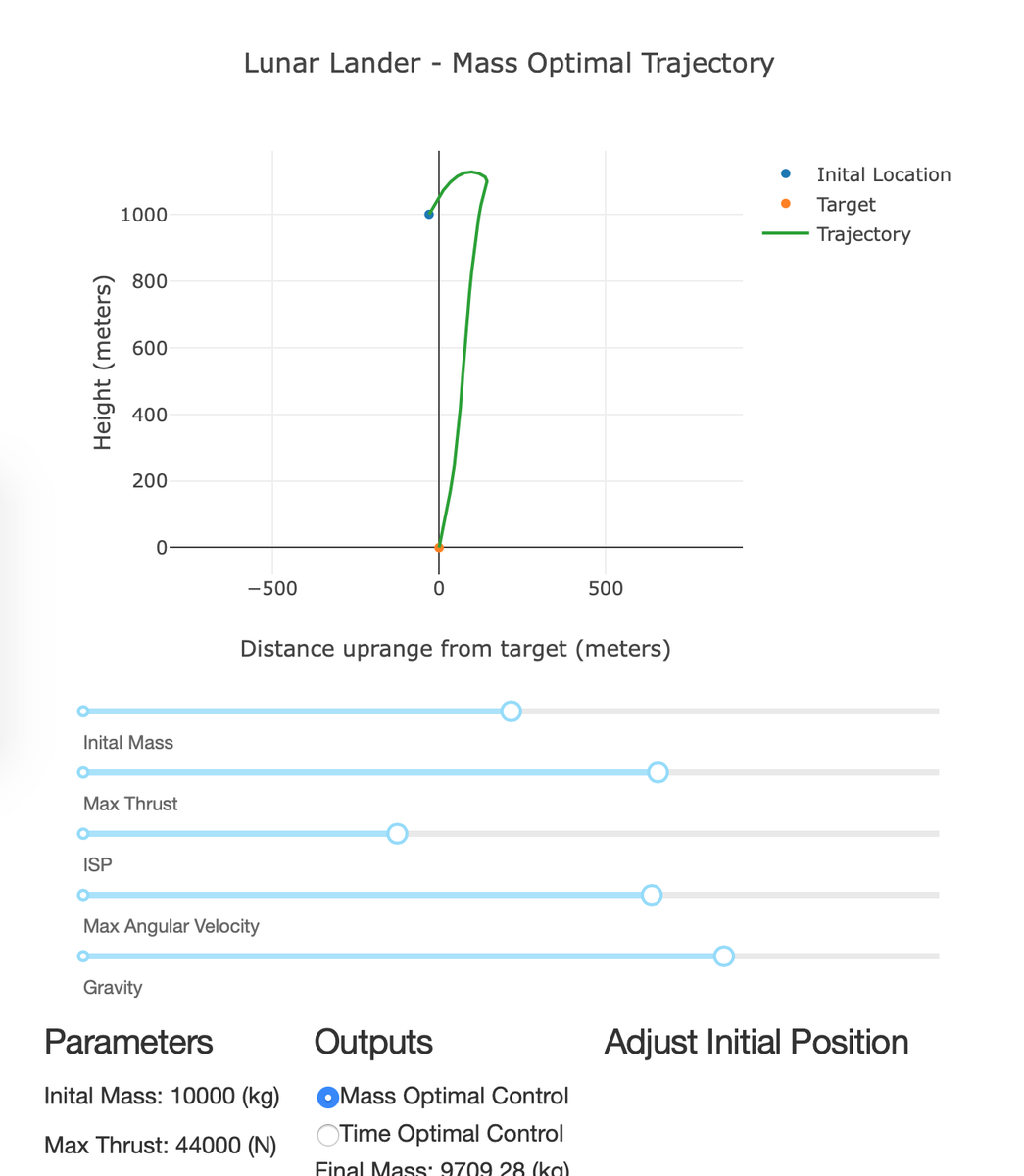
Spacecraft dynamics & control with Dash, #Python, and @casadi_software
Dash app: dash-gallery.plotly.host/das…
Code (440 lines of Python): github.com/plotly/dash-sampl…
#Mars2020 #MarsPerseverance
via @gereshes / @ari_rubin
3
4
4 Jul 2020
The big optimal control problem of our time
12 May 2020

Nice paper from the group of F. Allgöwer,
"Robust and optimal predictive control of the COVID-19 outbreak"
arxiv.org/abs/2005.03580
3