
sofrendo com o mestrado
Joined March 2026
- Tweets 3,236
- Following 762
- Followers 1,108
- Likes 2,725
108 Photos and videos












Pinned Tweet

Jun 12
✨Thread explicando Ros 2 e Gazebo e tentando te converter para duas ferramentas que eu AMO✨
4
7
17
1,013
39m
vc acha que ser mulher não vai te afetar nem mudar nada na sua carreira acadêmica até você ter que fazer 2 vezes mais sempre
1
1
3
43
clara retweeted

13h
é, galera…..

Estrangeiros ampliam compra de apartamentos no Rio em meio a boom do turismo
folha.uol.com.br/cotidiano/2…
46
95
4,200
337,013
clara retweeted

exatamente isso

32
8,310
38,232
171,412
clara retweeted

Jun 14
sem querer pesar o clima mas ela tava sendo espionada e usava o ds pq era mais seguro

Dilma tirando foto da taça da Copa do Mundo com um Nintendo 3DS (2014)

86
4,397
108,708
1,473,445
Jun 12
Pra quem quiser saber um pouquinho do que é bem usado em robótica
Jun 12

✨Thread explicando Ros 2 e Gazebo e tentando te converter para duas ferramentas que eu AMO✨
1
9
213
clara retweeted
Jun 12
✨Thread explicando Ros 2 e Gazebo e tentando te converter para duas ferramentas que eu AMO✨
4
7
17
1,013
clara retweeted
Jun 12
Passo 2: Executando o turtlesim**
Abra um terminal:
```bash
ros2 run turtlesim turtlesim_node
```
Uma janela com uma tartaruga aparecerá.
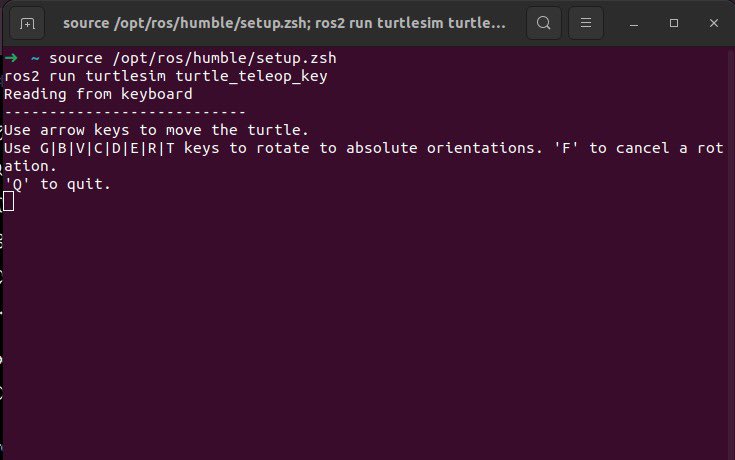
Agora abra outro terminal e execute:
```bash
ros2 run turtlesim turtle_teleop_key
```
Clique na janela do terminal e use as setas do teclado.
Você poderá mover a tartaruga pela tela.
* Esse exemplo parece simples, mas apresenta conceitos fundamentais do ROS 2 como nós tópicos mensagens e comunicação entre processos logo é um dos melhores pontos de partida para entender a arquitetura do sistema.

1
1
1
90
Jun 12
✨Thread explicando Ros 2 e Gazebo e tentando te converter para duas ferramentas que eu AMO✨
4
7
17
1,013
Jun 12
Passo 1: Instalando ROS 2 Linux
1- Atualize o sistema:
```bash
sudo apt update
sudo apt upgrade -y
```
2- Instale o ROS 2:
```bash
sudo apt install ros-humble-desktop -y
```
3- Adicione ao terminal:
```bash
echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc
```
4- Verifique:
```bash
ros2 --version
```
2
3
533
Jun 12
Passo 2: Executando o turtlesim**
Abra um terminal:
```bash
ros2 run turtlesim turtlesim_node
```
Uma janela com uma tartaruga aparecerá.
Agora abra outro terminal e execute:
```bash
ros2 run turtlesim turtle_teleop_key
```
Clique na janela do terminal e use as setas do teclado.
Você poderá mover a tartaruga pela tela.
* Esse exemplo parece simples, mas apresenta conceitos fundamentais do ROS 2 como nós tópicos mensagens e comunicação entre processos logo é um dos melhores pontos de partida para entender a arquitetura do sistema.
37
Jun 12
eu sendo estranha de madrugada aesthetic
Jun 12
✨Thread explicando Ros 2 e Gazebo e tentando te converter para duas ferramentas que eu AMO✨
3
142
Jun 12
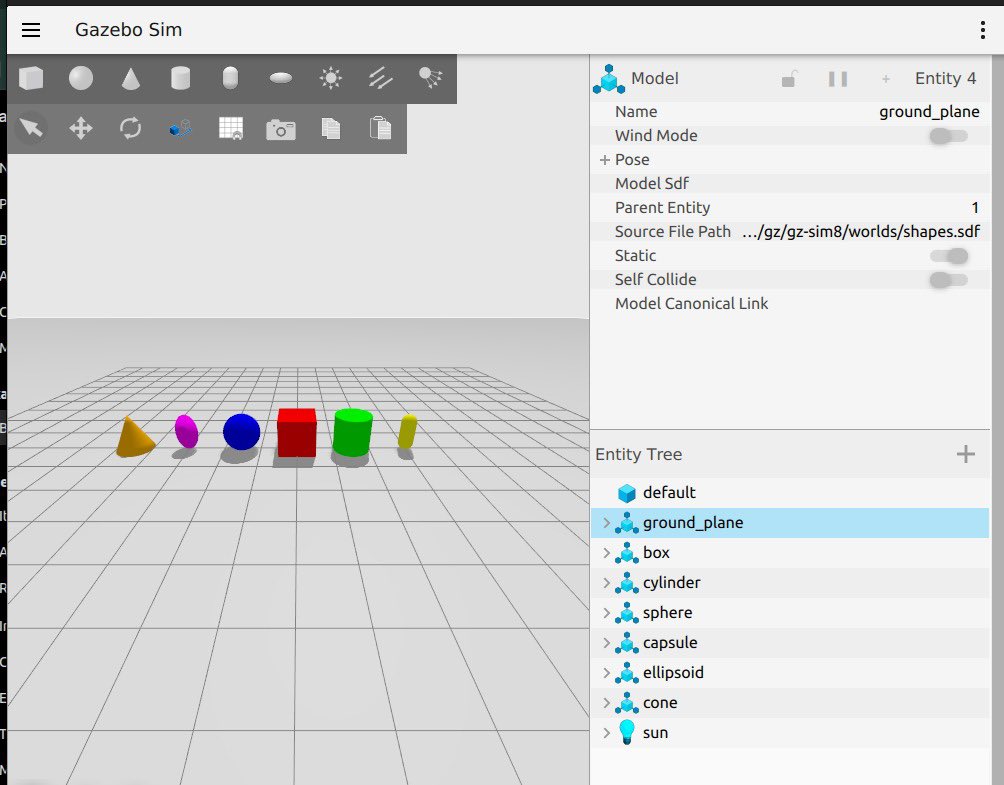
Passo 4: Criando uma simulação simples
Abra um mundo vazio.
No menu de inserção de objetos, adicione:
- um cubo
- uma esfera
- um cilindro
Posicione cada objeto em locais diferentes, mas que possam ter resultados legais ou divertidos.
Agora pressione Play.
1
2
4
114
Jun 12
Enfim esse é o básico do básico só para eu espalhar a palavra pra vcs!!!! espero que tenham gostado só um pouquinho!!! 😭🥺🤙🏼✨
4
69