
Head of the Robotic Imaging Lab @Sydney_Uni / @SIRISRobotics / Australian Centre for Robotics; Theme Lead @ariam_hub; Better robots for better humanity.
Joined April 2009
- Tweets 2,864
- Following 1,850
- Followers 1,156
- Likes 1,097
738 Photos and videos














Donald Dansereau retweeted

Registrations for the Robotic Vision Summer School 2025 are open! Join us at the beautiful Australian Pacific coast for a week full of robotic vision lectures, hands-on practicals, and research spotlights! Learn from the best, make new friends, have fun! rvss.org.au

1
3
7
1,256
Donald Dansereau retweeted

29 Oct 2024
Excited to organise the Robotic Vision Summer School again for 2025 with an amazing team of co-organisers and speakers! Registrations are open, get your ticket early! rvss.org.au/ @DimityMiller @TobiasRobotics @dgdvision @feras_dayoub @QUTRobotics

Registrations for the Robotic Vision Summer School 2025 are open! Join us at the beautiful Australian Pacific coast for a week full of robotic vision lectures, hands-on practicals, and research spotlights! Learn from the best, make new friends, have fun! rvss.org.au
4
10
791

14 Oct 2024
Congrats Jack Naylor @nackjaylor for being one of five speakers at the #IAC2024 NextGen Plenary in a few days! iafastro.org/events/iac/inte…
1
5
310
5 Oct 2024
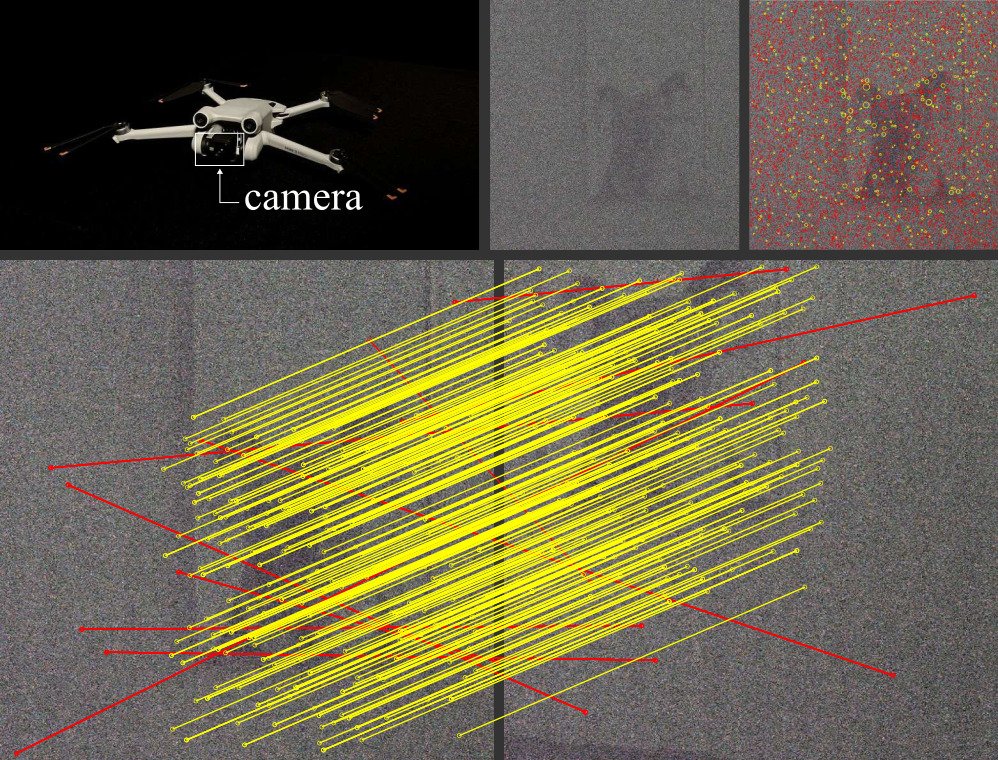
Our privacy-preserving camera work gets a nice menrion in this ABC piece: abc.net.au/news/2024-10-05/r…
10
225
4 Sep 2024
Applications for our vacation research internship program are open, apply by 17 Sept: sydney.edu.au/engineering/st…
1
3
1,727
Donald Dansereau retweeted

22 Jul 2024
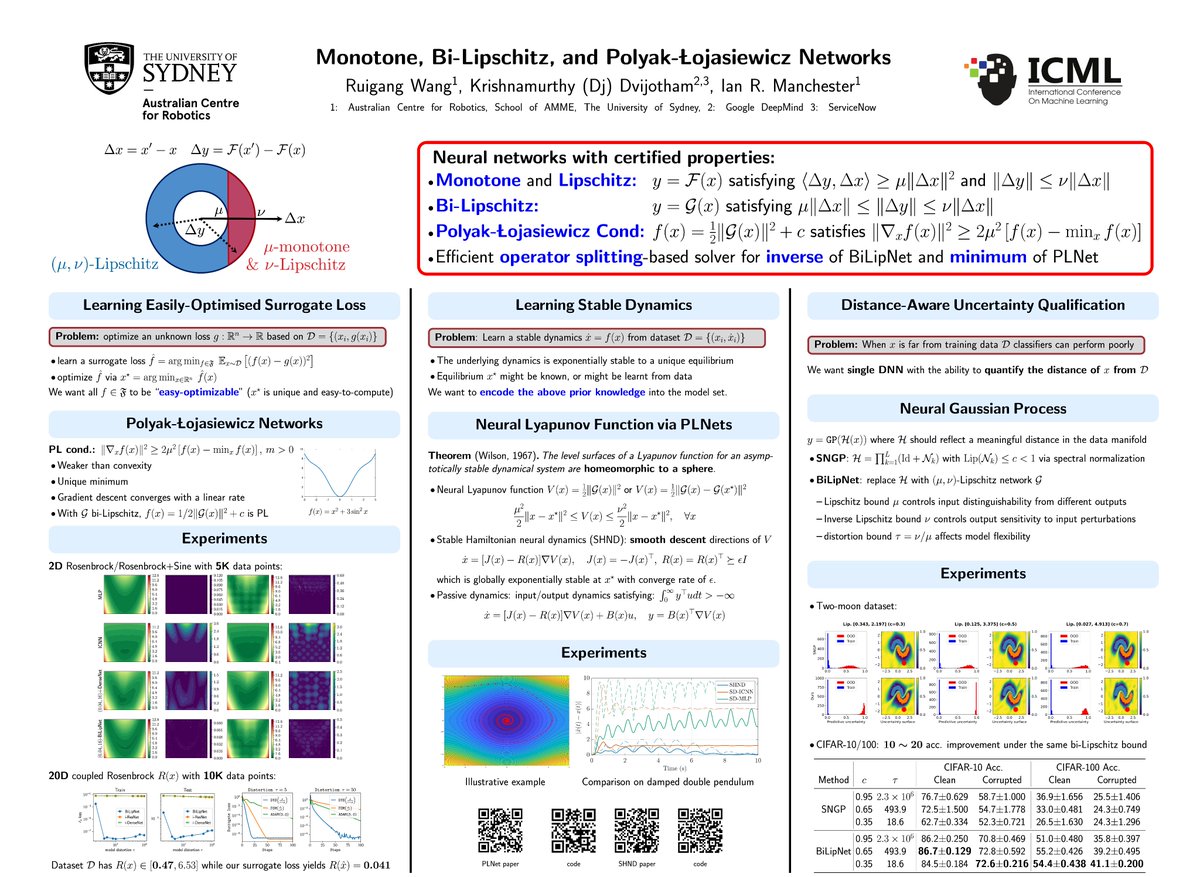
If you learn a classifier, how can you quantify uncertainty?
If you learn a neural ODE, how do you ensure stability?
If you learn a surrogate loss, will it have a unique minimum? Can you find it?
At @icmlconf we present answers to these questions.
Poster sess 5, Thurs 1:30pm.
1
8
47
3,968
6 Jun 2024
Closing soon, 10 Jun midnight Sydney time.
10 May 2024

3-year postdoc in Sydney: 3D reconstruction of reflective infrastructure. Experienced with NeRF, Gaussian Splatting, or Light Fields? Want to help robots see and do? We want to hear from you! roboticimaging.org for details @trendspek @ariam_hub @SIRISRobotics @Sydney_Uni
4
6
1,212
Donald Dansereau retweeted

4 Jun 2024
ARIAM Research Hub is excited to announce that our inaugural Australian School of Robotic Systems (AuSRoS) will take place on July 2-5, 2024. The program will bring together an exciting four-day lineup of lectures, workshops, and activities. More: ariamhub.com/event/ausros/


2
5
2,236
3 Jun 2024
We're featured in the Australian Financial Review today: Aussie experts can stop your smart-device cameras spying on you afr.com/technology/aussie-ex…
1
5
15
1,090
Donald Dansereau retweeted

4 Jun 2024
❓ Want to find out more about study with us?
👉 Explore our research programs: lnkd.in/gRxrx3M
👉 Get in touch with one of our Chief Investigators: lnkd.in/gsg5fy5G
👉 Or send your CV to the centre directly: robotics@qut.edu.au
#PhD #Study #QUT #phdforum
2
3
649
Donald Dansereau retweeted

30 May 2024
Excited to announce our upcoming and first ARIAM seminar: on Thurs (13th June) 1pm AEST Dr Alexandre Cardaillac will present on: Towards autonomous underwater navigation and perception for end-to-end ship hull inspection.
robotics.sydney.edu.au/semin…
2
6
492
31 May 2024
Seminar: Adapting CNNs for Fisheye Cameras without Retraining, 6th June, 1:00pm @SIRISRobotics @Eng_IT_Sydney robotics.sydney.edu.au/semin…
9
521
Donald Dansereau retweeted

30 May 2024
🐍Python update!
Our privacy reconstruction challenge now contains a python quick-start! All the instructions and contributions from others can be found at github.com/RoboticImaging/pr…
Project page: roboticimaging.org/Projects/…
1
6
224
Donald Dansereau retweeted
19 May 2024
Excited to announce our next seminar: next Thurs (30th May) 1pm AEST Prof Ian Manchester will present on: Robust Learning for Dynamics, Control, and Optimization.
robotics.sydney.edu.au/semin…

1
4
17
997
Donald Dansereau retweeted

16 May 2024
@robo_nerf Workshop is tomorrow! Swing by for our spotlight talk and poster presented by @dgdvision!
You can also find our paper on OpenReview: openreview.net/forum?id=BfGH…
@SIRISRobotics #ICRA
10 May 2024

RoboNerF: When should you add a frame to a radiance based map representation? This work led by recent Honours student Josh, shows that setting a threshold on synthesised views maintains map quality, whilst reducing data and computation requirements.

1
2
231