
learnin' some machines @google. ex-wavii, ex-@lastfm. music nerd. craft cocktail maker. awful joke teller.
Joined March 2009
- Tweets 1,282
- Following 27
- Followers 420
- Likes 42
64 Photos and videos













Erik Frey retweeted

18 Mar 2025
📣MuJoCo announcement 📣
Thrilled to share that @GoogleDeepMind has unveiled MuJoCo-Warp at @nvidia's #GTC25!
🚀 We've expanded our open-source MuJoCo simulator with MuJoCo-Warp, leveraging NVIDIA’s Warp framework for incredible acceleration. This marks a significant step in making high-performance simulation more accessible.
18
86
608
82,063
Erik Frey retweeted

16 Jan 2025
The ultimate test of any physics simulator is its ability to deliver real-world results.
With MuJoCo Playground, we’ve combined the very best: MuJoCo’s rich and thriving ecosystem, massively parallel GPU-accelerated simulation, and real-world results across a diverse range of robot platforms: quadrupeds, humanoids, dexterous hands, and arms.
Best of all? You can get started today with a single command: pip install playground
playground.mujoco.org/
37
178
898
153,511
Erik Frey retweeted

2 Feb 2017
We're hiring! Join a fun and talented group of engineers, designers, ops managers, physicians, and more. jobs.lever.co/goforward

1
12
24
Erik Frey retweeted

17 Jan 2017
A little about what I've been up to lately....Health Moves Forward - medium.com/goforward/health-…
4
14
51
Erik Frey retweeted

28 Jan 2015
moaning, holding ourselves to quell the inner pain: we are experiencing incredible growth.
4
359
927
Erik Frey retweeted
31 Jan 2015
Hope your week is going to explode.
3
32
111


replacing mud floors with concrete in 100M of the world's poorest homes would cut parasitic diseases by nearly 80% #concretefacts
2
all the world's built up, paved surface area is an area equal to the size of kenya. #concretefacts
every 20 years we construct about one mt. fuji's worth of concrete, brick, tile, and glass. #concretefacts
Erik Frey retweeted

30 Aug 2014
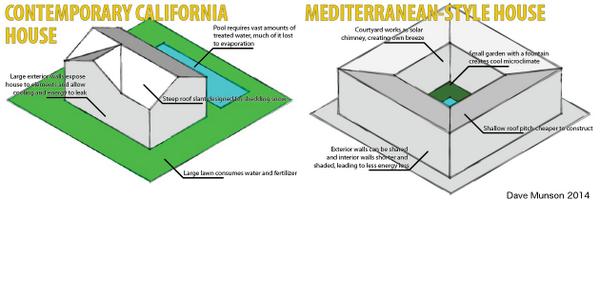
why California should get rid of lawns, shift from Anglo to Mediterranean building models munsonscity.com/2014/08/29/l…
5
47
24
an admirable new enlistee in the club of take on me covers open.spotify.com/track/0EUUD…