
Physical AI & Robotics @ Nebius $NBIS Writer & podcast host @ dreammachines.ai, exploring physical AI and the future of being human. 🔗 below
Joined October 2010
- Tweets 2,688
- Following 1,005
- Followers 1,763
- Likes 1,148
492 Photos and videos














Pinned Tweet

5 Dec 2025
It’s time for a new adventure. I’m joining one of the top AI clouds, Nebius (@nebiusai), as their Head of Physical AI.
I’m also leaving my first professional love — spatial computing. At least in its most direct and advertised form, i.e. AR, VR, 3D, aka ‘XR’.
But in another sense, I’m not leaving at all.
I’m going deeper.
As I've hammered on my newsletter — Dream Machines — spatial computing is far more than XR.
This is just one end-point; just one form of a computer relying on sensors to localize, track, and understand the physical world.
Self-driving cars, mobile robots, humanoids, autonomous drones...
These are all ‘spatial computers’, each relying on a similar technical foundation, with similar computer vision tech, simulation tools, and ‘spatial’ data types, e.g. lidar, point clouds, 3D, video, IoT/sensors.
The key difference?
Autonomy and their ability to impact/interact with the physical world.
So again, I’m not leaving. I’m just moving downstream; from a ‘spatial tributary’ to a gushing river, surging with capital, progress, and commercial opportunity.
Jensen Huang popularized the term 'physical AI' about a year ago, and as it goes... Interest and awareness has exploded ever since.
To be sure, Jensen likes to live 10 years in the future. Heck, so do I.
But physical AI remains early and is entering a hype cycle of its own. One that, at first glance, feels like the hype cycle that sucked me into XR.
But this feels different. The timing feels right: early, but not too early...
If you want to know why... check out the essay below 👇👇
It'll give you a L100-200 grasp of this new tech stack and the key innovations worth monitoring.
And if you enjoy, do subscribe!
There'll be a Part II... covering some of the challenges that remain, including the ones that I’ll be trying to solve in my new role at Nebius, as their Head of Physical AI.
Lastly, if you work in this space and want to connect. Drop me a DM.
Otherwise... See you on the front lines🫡
@EndicottInvests @mvcinvesting
16
16
257
28,580
10h
Had a blast running it back for round 2 with @KingDSky on Sky Kings Mental Playground.
We dive deep into the physical AI stack, the key trends to follow, and the overlap between XR robotics.
And in classic Sky King fashion, we spin off in all kinds of directions, from fatherhood, to anime, to the state of the world and what to do about it.
Full episode 👇
youtu.be/1gLxEQpwnfs
1
1
178

AI, crypto, and social media are all fights over coordination, ownership, and attention. Evan Helda connects the technologies without reducing them to buzzwords. @evanhelda
1
1
113
The default AI discourse gets trapped in doom or hype. Evan Helda argues for a more useful posture: understand the incentives, then build toward better outcomes. @evanhelda
2
153
The useful AI question is not whether to cheer or boo the technology. It is what we do with the leverage and what human experience we refuse to outsource. @evanhelda
1
1
116
Jun 5
I ask the same question at the end of every podcast: in an era of exponential change, what's the most important question we should all be asking ourselves?
I most recently posed this question to Charles Wong and Aravind Kandiah: two founders deep in the trenches of robotics, AI, and the future of work (Bifrost AI)
Their answer wasn't what you'd expect from technologists building at the frontier.
No grand theory of civilization. No AGI prophecy. No moonshot manifesto.
Just this: What quest are you on? And who's your tribe?
In a world drowning in signal, noise, and 10X productivity expectations… the thing that actually matters is the oldest thing in the book — your people, your community, the life you're choosing to live.
It's the perfect note to end on.
It's also the whole reason Dream Machines exists — to explore not just where technology is going, but where it's taking us.
Full episode here: dreammachines.ai/p/synthetic…
2
1
122
May 31
Imagine when intelligence is "solved". Imagine there's a final API for world: a single brain that can do anything, anywhere; the physical AI holy grail.
Even then… you've still got a problem.
You can't just load it into a robot, walk it into your lab, and hope it works.
You need rigorous, domain-specific evals. CI/CD for robots. Thousands of scenario tests before a single one touches real infrastructure — or real lives.
In this clip, the Bifrost co-founders argue the real bottleneck of the robot age isn't training. It's evaluation.
And they're already living it: most of their customers use them for evals more than training.
The moonshot? An "imagination engine" running on edge compute — where robots roll out 40 versions of a scenario in their own heads before deciding what to do.
Wild stuff. And maybe closer than we think.
For a deeper dive, check out the full episode below👇
Apple Pod: podcasts.apple.com/us/podcas…
Spotify: open.spotify.com/episode/6R9…
1
136
May 28
One of the most common debates in robotics...
Can you really train robots in simulation… and have them just work in the real world?
The answer is far from a clean yes or no, and the conundrum has a name: Sim2Real.
In this clip, Bifrost's co-founders demystify it. We break down:
- The 4 layers of Sim2Real (perception, dynamics, contact forces, deformables)
- Where it actually works
- Where it absolutely doesn't
- And the mind-bending trick of "sim → sim → sim → real": bouncing a policy across physics engines until reality becomes just one more.
Best line of the whole convo? "Reality is just another type of physics engine."
Make of that what you will.
Full episode here: dreammachines.ai/p/synthetic…
1
150
May 24
"Sim-2-real" is one of the most common buzz words in robotics.
But very few truly understand what it means, why it matters, and how to harness it.
This episode will change that.
1
8
562
Evan Helda retweeted

Robot fight club - possibly the most SF thing ever?
Last week I dropped in to @UFBots (Ultimate Fighting Bots) at Temple nightclub, organized by @vitl2907 and @XeniaBulatov and powered by @nebiusai.
Pretty insane event! All of the fighting robots were @UnitreeRobotics, although in the crowd I did spot the adorable Abi by @AndromedaRobots (with her signature bubble gun).
In this video I speak with Vitaly about UFB and his vision for the future of robotics.
3
2
316
May 9
Today’s guest is Will McDonald, co-founder and Chief Product Officer of Miris.
Miris is rethinking how high-fidelity 3D content gets delivered at scale. Their thesis: the future of 3D depends entirely on simplifying distribution.
In that vein… we talk about why pixel streaming falls short, how Miris uses volumetric data instead, and why that matters for everything from e-commerce and gaming to robotics and simulation.
Will and I worked together for many years at AWS, so we also dive into lessons learned from Amazon’s customer obsessed culture, what it gets right, and experience of going from big tech back into startups.
If you care about spatial computing and simulation, and where the 3D internet is heading, this one’s worth the time.
With that I bring you, Will McDonald.
Full episode here: dreammachines.ai/p/the-3d-co…
2
308
Evan Helda retweeted
Apr 26
If you’re a millennial or beyond, few things are as memorable as Sesame Street.
That said, I hadn’t thought about Sesame Street or its wonderful characters in a long time. Not until this conversation with Pasquale D’Silva.
Pasquale is on a mission to recreate the magic of Sesame Street, but with the power of AI and robotics.
In our convo, he waxed poetic about Jim Henson; his vision, his philosophy, and his blueprint for creating characters that deliver joy.
Pasquale is following Jim’s blueprint, but he’s adding a unique spin: the art of clowning.
Yes, you heard me. Clowning.
Sounds strange, but bare with me… It connects back to robotics; particularly, building robots we’ll actually want.
Pasquale’s mission sparked something in me. Perhaps because my daughter Chloe is turning one and becoming a sponge. Or perhaps, because this mission is as important as any other in the AI race.
So I wrote a letter to good ol’ Jim to explain why 👇
dreammachines.ai/p/dear-jim-…
1
4
2,014
Apr 19
🦾 RobotOps: Why running physical AI is nothing like running software
We've spent a decade perfecting how to run AI at scale.
Model registries. Training pipelines. Dashboards. Drift detection. The whole assembly line.
It works beautifully... for AI that lives safely behind an API in the cloud.
But physical AI? Robots? Autonomous machines moving through the real world, all day, every day?
That's a completely different animal.
And it demands an entirely new discipline: RobotOps.
---
First, a quick primer. 🏁
The existing playbook is called MLOps, how dev teams reliably train, deploy, and operate machine learning models at scale.
MLOps was built for the internet. It assumes AI lives in a clean, predictable digital bubble. Nothing explodes. Data changes slowly. When something breaks, it's a math problem, you check a dashboard, retrain the model, push an update.
The artifacts are tidy: models, datasets, training code. The feedback loop is tidy: click-through rates, accuracy scores, loss curves. Human teams decide what to fix and when.
Clean. Controllable. Comfortable.
RobotOps blows all of that up.
--
The difference starts with what you're actually operating. ⚙️
In MLOps, you're managing models.
In RobotOps, you're managing behavior and behavior lives in the physical world, which does not care about your clean abstractions.
The artifacts multiply: perception models, control models, sensor calibrations, 3D maps, world representations, simulation environments, and enormous streams of multimodal sensor data captured during real-world operation.
Code and models still matter. But they're no longer the center of gravity.
--
The feedback loop is a different beast entirely. 🔁
In MLOps, you close the loop through digital signals. The model predicts. The user clicks (or doesn't). You log it, analyze it, retrain on a human-defined schedule.
In RobotOps, the loop runs through the physical world itself.
A deployed model produces behavior. That behavior meets an unpredictable environment. Sensors capture the consequences. Those logs must be ingested, indexed, graded, and transformed into new training data and new simulation scenarios.
This loop is continuous. Not episodic.
Training, validation, and operations collapse into one always-on learning system or at least, that's the goal.
---
And failure? Failure carries a completely different weight. 🏋️
In MLOps, failure is annoying. A user sees the wrong ad. An irrelevant search result surfaces. Embarrassing, maybe costly but recoverable.
In RobotOps, failure is physical.
Damaged hardware. Safety incidents. Regulatory nightmares. Or worse: a bad model silently poisoning future training data, compounding errors over time before anyone notices.
A bad model doesn't just output a wrong number. It creates a dangerous event.
This is why provenance, knowing exactly where your data came from, isn't a best practice in RobotOps. It's a survival mechanism. You need to know *exactly* which model, environment, and scenario caused a robot to twitch. Not for debugging convenience. For safety.
---
Now for the gap that turns into a canyon: simulation. 💥
In MLOps, you look backward. Validate models on historical data. Shadow-deploy alongside existing systems. The model sits behind an API, observing the world without touching it.
In RobotOps, you have to look forward.
You can't just ask how a model performs on past data. You have to ask: how does it *behave* when the world pushes back?
To answer that, you need simulation. You need to run candidate models through thousands of scenarios, rare edge cases, sudden obstacles, lighting changes, before that code ever touches a physical machine.
Here's the hard truth: for most teams, this is a pipe dream.
Ignore the shiny visuals in keynote demos. Building a photorealistic, physics-accurate virtual world doesn't just require engineering talent. It effectively requires building an in-house AAA game studio.
Today, most teams use simulation sparingly, a bit of synthetic data here, some basic component testing there. It lives on the periphery.
But this will invert. Simulation is moving from a supporting role to the center of the development loop. The primary environment for validation, regression, and learning.
First, though, some fundamental problems need solving, fragility in simulation pipelines, massive 3D asset dependencies, and the inability to reliably replay thousands of runs in exactly the same way.
Not trivial. But solvable.
---
Finally: automation. 🛞
MLOps automation is largely pipeline-driven and rule-based. Humans decide what data to collect, when to retrain, which models to promote. Automation speeds up execution. Intent stays human-defined.
In RobotOps, the complexity quickly exceeds what humans can manage manually. Deciding which data is missing, which edge cases matter, which scenarios to simulate next, which models should evolve, it becomes a constant cognitive bottleneck.
This is where AI-native automation becomes not just helpful, but necessary.
The early signals are already here: vision-language models auto-labeling sensor data, world models grading synthetic scenario quality, agents proposing new simulation campaigns based on observed failures.
Over time, these agents will operate entire segments of the learning loop on their own.
That's the real inflection point, when RobotOps systems start improving themselves faster than humans could ever direct.
---
So where does this leave us? 🎬
Existing MLOps tools still matter. Model registries, training pipelines, orchestration frameworks, they're not going away.
But they operate at too low a level for physical AI.
RobotOps demands higher-order abstractions:
Scenarios, not datasets. Behaviors, not predictions. Simulation campaigns, not experiments. Data grading, not drift detection. Learning loops, not deployment cycles.
In this sense, RobotOps isn't just the next evolution of MLOps.
It's the operational layer for embodied intelligence, systems that learn through action, adapt through experience, and operate under physical constraints.
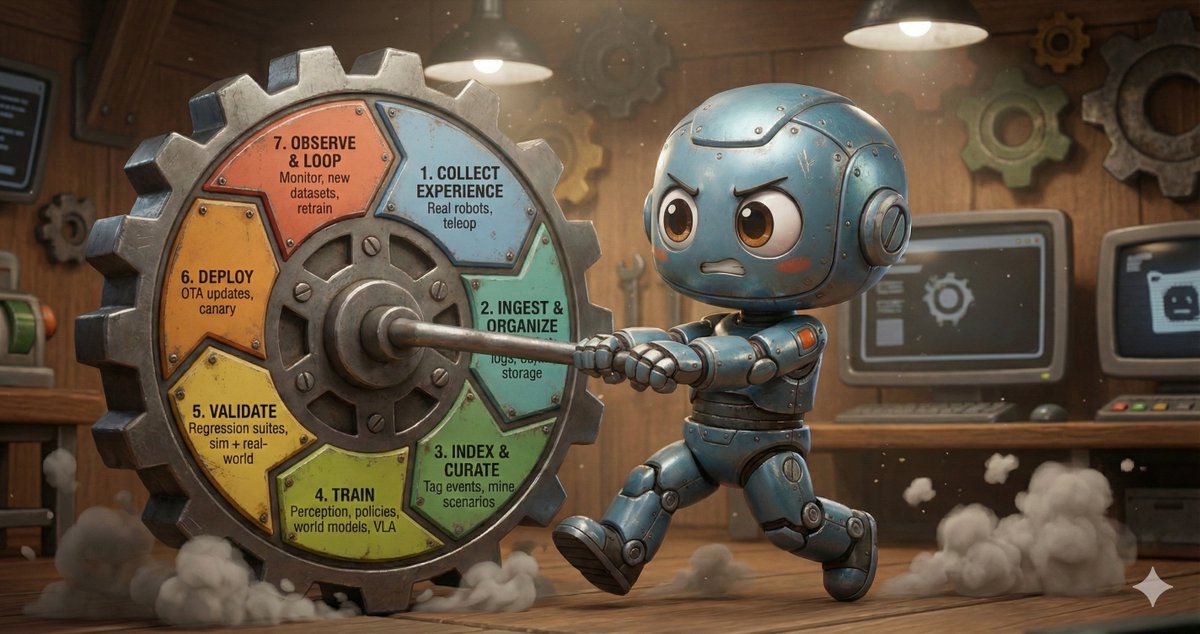
The holy grail? A fully automated, physical AI data flywheel.
We're not there yet. But the discipline is being built, right now, in real time.
And the teams that figure it out first?
They won't just be building better robots.
They'll be building the infrastructure that the entire physical AI era runs on.
--
Read more about this concept, and others like it, at Dream Machines ⬇️
5
1
4
251
Apr 19
1
126
Apr 15
💻 MLOps was built for software. RobotOps was built for reality.
MLOps lives in the calm. RobotOps lives in the crash, the scrape, the signal loss, the world pushing back.
MLOps breaks in dashboards. RobotOps breaks in factories.
MLOps predicts at a distance. RobotOps acts at close range.
MLOps was designed for intelligence behind glass. RobotOps is designed for intelligence in motion, under pressure, under consequence.
In MLOps, failure is often informational. In RobotOps, failure can be physical, expensive, public.
MLOps is what happens when models stay safely behind the screen. RobotOps begins the moment those models leave the screen and enter the scene.
MLOps built the assembly line for digital intelligence. RobotOps must build the assembly line for embodied intelligence.
MLOps was born in systems that sit and observe. RobotOps was born in systems that move, act, and collide with reality.
MLOps was built for systems that predict. RobotOps is built for systems that act.
This contrast is the foundation of my latest essay below.
It goes deep into all the gaps between MLOps and RobotOps, and then follows Maya, a robotics engineer, through a long day of trying to spin the physical AI data flywheel. 🛞
Link here ⬇️
1
2
215
Apr 12
New essay, with a sci-fi twist — 2033: The Future of Robot Learning. 🤖 👇
My last essay contrasted MLOps with ‘RobotOps’: the discipline required to break intelligence out of tiny screens and into the physical world.
It also followed a day-in-the-life of a robotics developer (named Maya) and a stressful one at that; fumbling and bumbling her way through the lifecycle of robotics data, i.e. a physical AI ‘data flywheel’.
Today, we’re blasting Maya into the future.
This is what it feels like when the data flywheel runs itself.
Enjoy.
PS: When I first wrote this, it was before the release of agentic tools/harnesses like OpenClaw. Suddenly, this stuff is not nearly as sci-fi as you might think.
Much of ‘2033’ will likely be pulled into 2028-29, if not sooner. Curious if you agree... let's hear your thoughts in the comments.
dreammachines.ai/p/2033-the-…
1
1
152
Evan Helda retweeted
Apr 10
My last essay contrasted MLOps with ‘RobotOps’: the discipline required to break intelligence out of tiny screens and into the physical world.
It also followed a day-in-the-life of a robotics developer (named Maya) and a stressful one at that; fumbling and bumbling her way through the lifecycle of robotics data, i.e. a physical AI ‘data flywheel’.
Today, we’re blasting Maya into the future.
This is what it feels like when the data flywheel runs itself.
Essay below. Enjoy. 👇
PS: When I first wrote this, it was before the release of agentic tools like OpenClaw.
Suddenly, this stuff is not nearly as sci-fi as you might think. Much of ‘2033’ will likely be pulled into 2028-29, if not sooner.
dreammachines.ai/p/2033-the-…
2
4
250
Apr 1
Character is the final AI Frontier
Most companies building AI characters are asking: "How do we make the technology more convincing?"
Illusion of Life is asking a different question entirely.
"How do we puppeteer humanness into the machine?"
Their process starts with humans LARPing as the character. Acting it out. Feeling it. Then working backwards to figure out what's worth automating and what isn't.
Eye contact, for example. Before building a computer vision system, they just... pointed the eyes manually.
And asked: does this actually change how people feel? Is it worth solving technically?
That's not a tech-first approach. That's a theatre-first approach.
Their bet: in a world of infinite AI agents, Character is the final frontier. Character, with a capital C.
Not the model. Not the hardware. But the spirit flowing through it.
This might be the one of the most important ideas in AI nobody is talking about.
🎧 Full conversation on Dream Machines, link below ⬇️
3
2
4
177