
Robotics & Computer Vision Professor at Georgia Tech, and part-time CAIO at Verdant Robotics. Before: stints at KUL, Skydio, Facebook B*8, Google AI.
Joined June 2008
- Tweets 3,551
- Following 1,432
- Followers 16,068
- Likes 14,937
Photos and videos
Pinned Tweet

27 May 2021
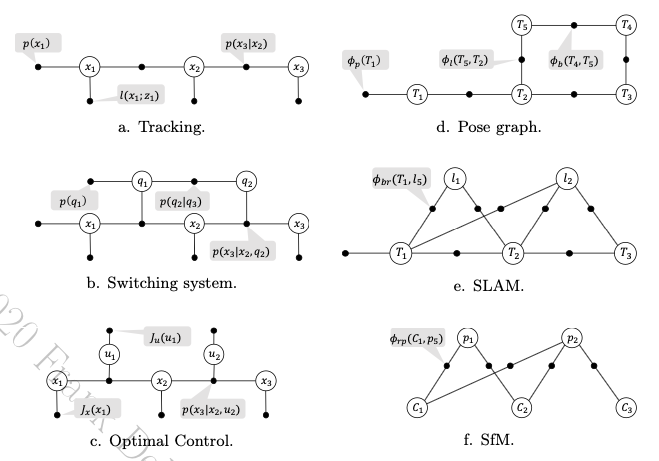
My Annual Reviews article on Factor Graphs in Robotics is finally out with a publicly accessible link: annualreviews.org/eprint/85P…
10
98
476
Jun 10
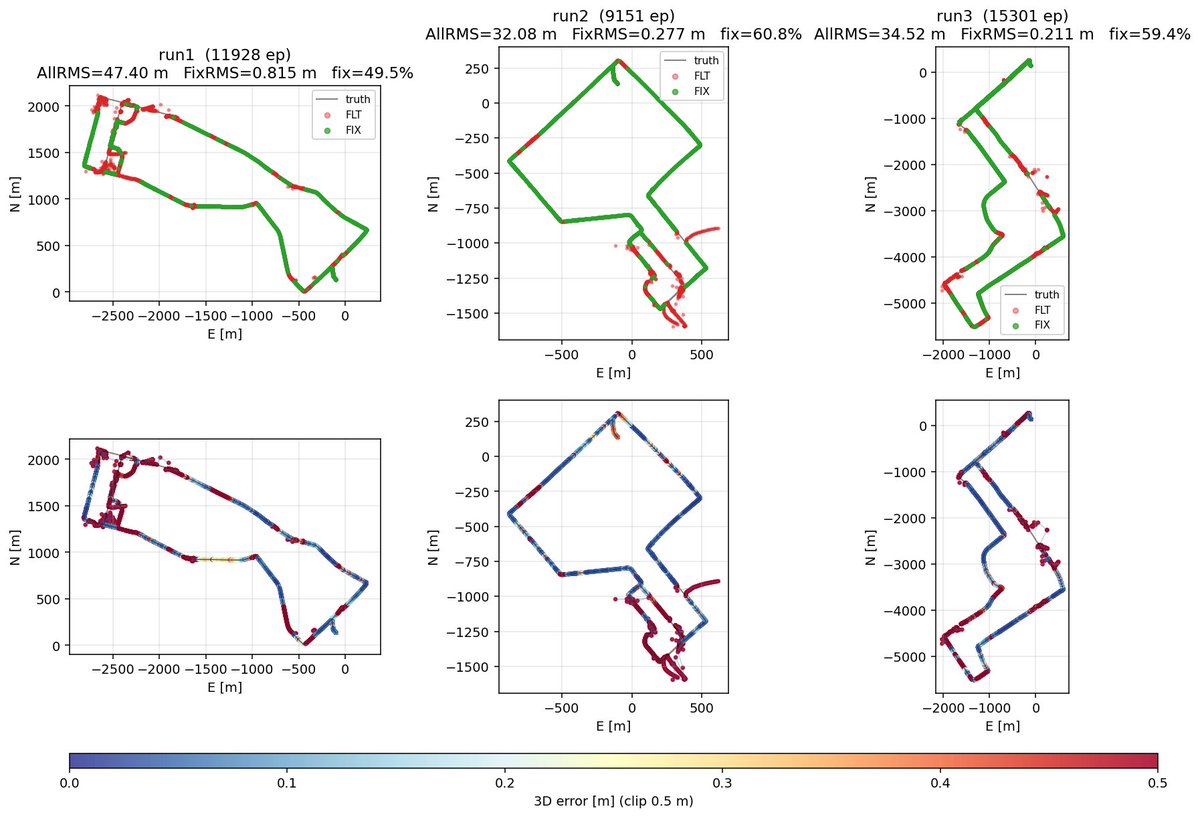
Huzzah! A new GTSAM blog post by Kosuke Inoue: RTK GNSS double-difference factors for pseudorange carrier phase, with lever-arm variants for GNSS-IMU fusion and example results on a Tokyo urban driving dataset.
A great community contribution to GTSAM’s navigation module. Link in replies.
1
7
58
3,365
Jun 8
This paper is breathtaking! A hybrid of learning and multiview geometry with incredible motion capture results, multi-person *with* contact.

I’ve been capturing 3D human motion for 30 years and today is maybe the biggest day in that history. We are presenting MAMMA at CVPR (oral session 2A). MAMMA is a markerless multi-camera system that has accuracy similar to marker-based systems.
1
6
80
14,483
Frank Dellaert retweeted

Come check out our work on GAVIS, a principled and efficient uncertainty quantification method for 3D Gaussian Splatting active perception.
We are presenting at #CVPR2026:
📍 ExHall A, Poster #464,
🕙 10:45–12:45
Come by and chat with us!
gatech-rl2.github.io/GAVIS/

2
7
17
1,482
Jun 5
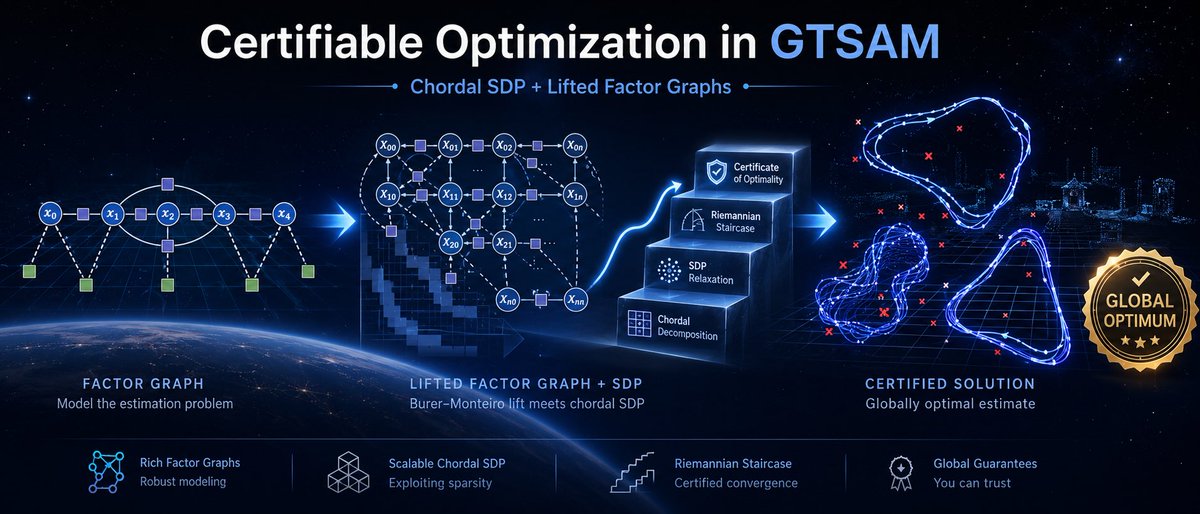
Part 3 of our ICRA-week certifiable optimization series is up: from chordal SDP sparsity and factor-graph Burer-Monteiro methods to global solvers for 3D vision.

1
1
10
1,544
Jun 3
Nice new blog post by David Rosen on certifiable factor graph optimization in GTSAM: gtsam.org/2026/06/02/certifi…
Together with the chordal SDP work I posted about recently, this should soon lead to some very cool new certifiable optimization features in GTSAM!!!
1
8
41
2,930
Jun 1
At #ICRA2026, certifiable optimization is having a moment. Our workshop paper with Avinash Subramanian, Connor Holmes, Tim Barfoot & Frederike Dümbgen brings chordal sparsity Bayes trees to globally optimal factor-graph estimation in GTSAM. Blog post and arxiv link in the replies.
1
7
38
6,906
Frank Dellaert retweeted

May 7
The only correct answer when a VC asks: "What's your moat?"

Starting a company in a garage is boring so we started @dottxtai in a French castle instead

25
38
708
58,574
May 8
A haiku, after receiving some heavily AI-assisted class-work this Spring semester :-)
Code is fungible!
Is language, too? Humanity,
forever changed.
1
1
12
1,203
May 2
The brains behind Mujoco ! (with Emo Todorov)
Apr 29

What's next for the future of robotics? Tom and Yuval — Google DeepMind Research Scientists (and long-time friends & collaborators) — shared their paths to Google and their insights on what lies ahead.
Learn more about Google's work in artificial intelligence and machine learning ➡️ goo.gle/4trO8bF
4
44
6,768
Apr 29
New GTSAM blog post on a new capability: the Equivariant Filter (EqF). This one is geekier than last week’s STAG post, but if you're intrigued by equivariance, manifolds, or symmetry-aware estimation, this post provides a gentle intro to the EqF. teaser image below, link in reply.
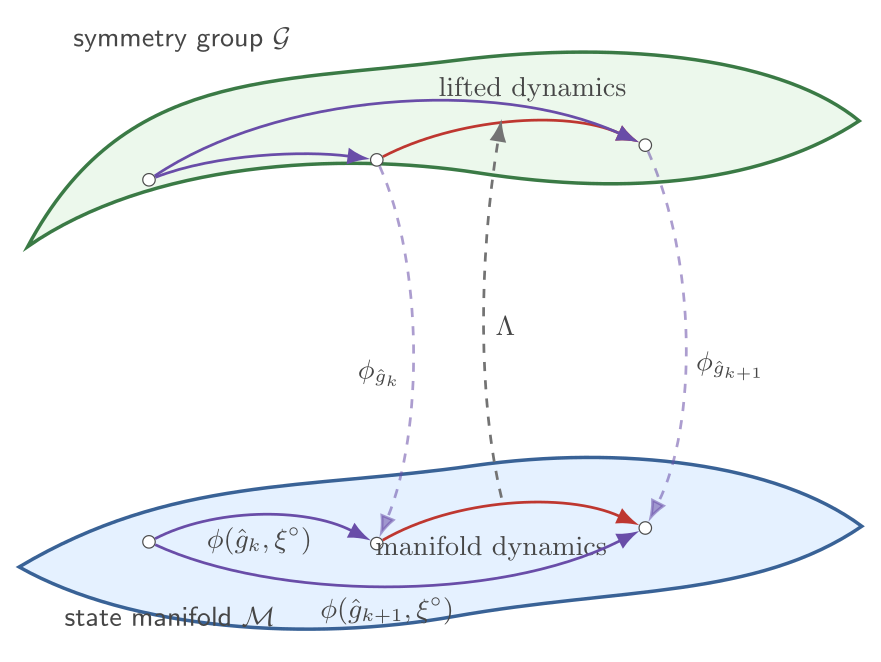
2
27
184
10,442