
Robotics @ OpenAI, CS PhD from UW, 🍕 Enthusiant, He/Him
Joined February 2019
- Tweets 110
- Following 332
- Followers 663
- Likes 30
14 Photos and videos







Come pursue your wildest ideas at OpenAI robotics! Our team is full-stack, high execution, and aiming to solve some of the biggest, most exciting technical problems of our era
May 31

OpenAI Robotics is hiring, looking for exceptional full-stack hardware, ops, systems, and ML engineers to help us program and manufacture robots that are useful for society.
AI should be able to help people in the physical world. In the short term, we are focused on robots to support skilled workers to build our future infrastructure; in the long term, we imagine everyone having a personal robot doing anything they need.
Our world simulation research program, led by Aditya Ramesh (@model_mechanic), has evolved over the past year into OpenAI Robotics. Progress is rapid, and based on a foundation of co-design between robotics hardware and ML research.
If you love working hands-on across the robotics stack and want to build the future, please consider joining us. Send an email with your background and evidence of exceptional accomplishment to: robotics-recruiting@openai.com
10
4
136
21,873

19 Apr 2025
Headed to ICLR next week! It's my first time at this conference. Anyone have tips?
2
9
1,084
12 Jan 2025
Super excited about these roles. If you (or anyone you know) would be a good fit, please reach out! We are a small, super collaborative team with big ambitions.
10 Jan 2025

Really excited to be posting our FIRST Robotics hardware roles for @OpenAI, including two very senior tech lead engineering (IC) roles and a TPM Manager.
The first role is for an **EE Sensing Engineer** to help us design the sensor suite for our robots.
The second role is for a **Robotics Mechanical Design Engineer** with experience designing gears, actuators, motors and linkages for robots.
The last role is for a **TPM Manager**. This will be a fun, scrappy role to start and will span Product TPM work, standing up our training lab, and keeping us running smoothly as we cycle through our product design phases.
I can't wait to get started on this work. I just hit my two month mark at OpenAI and can confirm the talent density, work velocity and focus make this a really wonderful place to do technical work. Join us!
(Links in comment)
2
27
4,926
6 Nov 2024
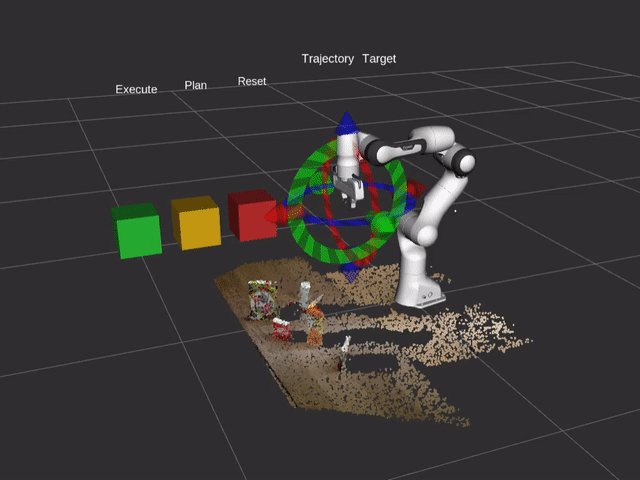
🚀 Excited to present our latest research at @corl_conf in Munich! Meet "Avoid Everything" – a novel, model-free approach to collision avoidance that brings robots closer to safely navigating real-world, cluttered environments. 🤖🦾
🧵👇
1
8
748
6 Nov 2024
6/n For those interested in the technical details, we’ve shared the paper on our project website and will open source the code soon (end of November): avoid-everything.github.io 📂💻
1
1
325
6 Nov 2024
7/n For those in Munich this week, come check out our poster Thursday morning (session 2). We’re thrilled to share this work with the robotics community and explore what’s next in safe, autonomous motion! 🌟
1
293
4 Nov 2024
I will be at CoRL in Munich this week! DM me if you want to grab a coffee and chat about big models for general robotic intelligence (or anything else) 🤖🧠
1
23
1,940
Adam Fishman 🐟🤖🐠 retweeted

22 Aug 2024
🤔 Can we train one policy to control a wide range of robots, from drones to quadrupeds, navigators to bimanual manipulators, and more?
🦾Introducing CrossFormer: a single policy that can perform manipulation, navigation, aviation, and locomotion:
crossformer-model.github.io
9
104
556
85,071
23 Jul 2024
In contrast to other areas of ML, supervised robot learning is unable to leverage internet-scale data because we just don't have internet-scale demonstrations of robotic behavior. In our new paper, This&That, we sidestep this challenge by leveraging a diffusion video model (1/n)
9 Jul 2024

Verry happy to share our new paper, This&That, an dynamic robot video generation model with language and simple gestures conditioning! Moreover, we also propose Diffusion Video to Action (DiVA) model to transfer generated videos to robot actions in the rollout environment.
1
12
65
5,936
23 Jul 2024
To leverage these gesture-and-language conditioned videos, we propose a novel architecture that we call DiVA. It consumes the generated videos alongside perceptual input (images) as conditioning and produces action chunks to execute on the robot (6/n)
1
312
23 Jul 2024
This work was in collaboration with a bunch of amazing researchers at University of Michigan: @BoyangWang7, Nikhil Sridhar, Chao Feng, @MarkVanderMerwe, @NimaFazeli7, and @jjpark3D
316
16 Apr 2024
TIL the OG author of the classicthesis LATEX template collects postcards from the many (many!) people who have used his template. miede.de/postcards/
1
6
381