
We push the boundaries of human-robot teamwork. We are part of @umrobotics and directed by @mavrojean.
Joined April 2023
- Tweets 30
- Following 1
- Followers 66
- Likes 0
9 Photos and videos

Fluent Robotics Lab retweeted
Hello @ieee_ras_icra ! We (@fluentrobotics) are in Vienna to present our new #ICRA2026 dataset paper Bi^3 to support research in social navigation, human motion prediction, and human-robot interaction.
youtu.be/z55M_um_7fQ?si=UbHk… via @YouTube
2
4
11
793
Fluent Robotics Lab retweeted
📰In our new IEEE RA-L paper (also to appear @ieeeiros), led by my fantastic PhD student, Jeeho Ahn, we introduce ReloPush-BOSS, a planning framework for rearranging cluttered workspaces using a mobile robot pusher.
project page: fluentrobotics.com/relopushb…
🧵👇
1
3
5
483
Fluent Robotics Lab retweeted
Our #HRI2026 late-breaking report looks at how to generate legible robot motion in pedestrian environments, specifically focusing on 2 Qs:
🔸what should a robot be legible over?
🔸how does human distraction impact the benefits of legibility?
@fluentrobotics
@UMRobotics
1
2
5
401
Fluent Robotics Lab retweeted
Excited to share our #HRI2026 paper! 🎉
Over the past two years, my @fluentrobotics lab @UMRobotics & the group of Rachid Alami (LAAS Toulouse) ran an ambitious project to study the implications of human motion prediction fidelity for downstream MPC navigation performance
1
3
26
1,041
Fluent Robotics Lab retweeted

15 Jul 2025
We started "Robo Reflections" 💭 the new #HRI group @UMRobotics. It's like a reading group, but better - we engage in critical discussions beyond the readings of a single paper 🩶
Co-organized: @longjinghsu, @masterson_a, @mavrojean, @lionelrobertjr, leia stirling
1
5
21
895
Fluent Robotics Lab retweeted

1 Jul 2025
Happy to share my talk from the #ICRA2025 workshop on long-term human motion prediction (motionpredictionicra2025.git…), where I highlight recent research from the @fluentrobotics lab on engineering fluent human-robot teamwork!
youtu.be/FXNelyxjM9A
@UMRobotics
3
8
870

20 May 2025
Rearrangement planning for embodied pixel art!
For the Arts in Robotics Session @ieee_ras_icra, we will demonstrate how our ReloPush planning framework (fluentrobotics.com/pdfs/ahn2…) enables a mobile robot to produce room-scale pixel art by pushing a set of cubic pixels. #ICRA2025
1
1
1
604
20 May 2025
Our demonstration involves a cycle between the formation of the greek letters Α and Ω, representing respectively an infinite loop between the beginning and the end ♾️.
1
23
20 May 2025
Work by Jeeho Ahn and @mavrojean
Expo Hall (Room 101A) - 9AM- 1PM Wednesday
video: youtu.be/WNWegHkDJ1Q
paper: fluentrobotics.com/pdfs/ahn2…
code based on ReloPush: lnkd.in/g6xy2M7h
hardware: mushr.io/
@UMRobotics
1
3
249
1 Apr 2025
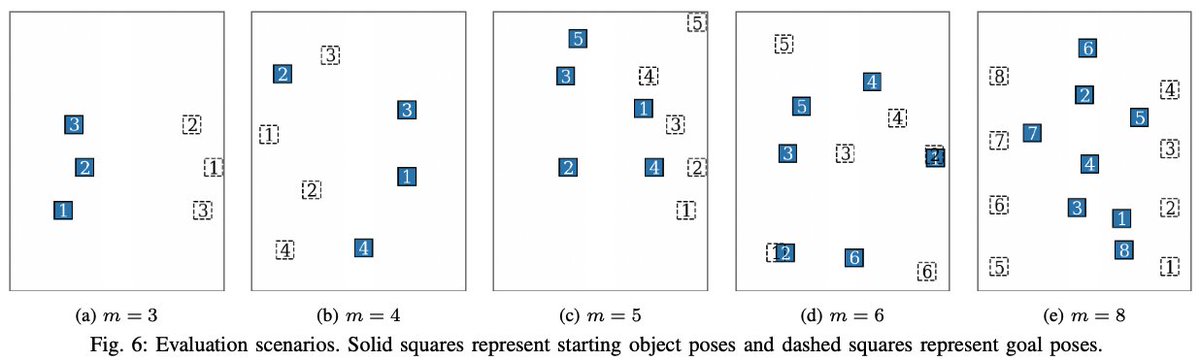
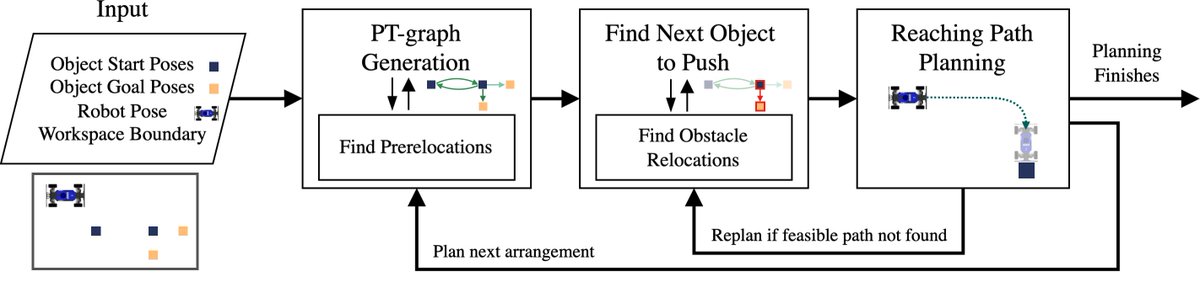
How can we enable constrained robots to rearrange cluttered, unstructured spaces?
In our #ICRA2025 paper, we present ReloPush, a planning framework that enables car-like robots to rearrange dense clutter using only pushing, commodity hardware, and no workspace engineering!
1
1
5
854
1 Apr 2025
Work led by my brilliant PhD student, Jeeho Ahn, who will present this paper next month @ieee_ras_icra!
paper: fluentrobotics.com/pdfs/ahn2…
code: github.com/fluentrobotics/Re…
video: youtube.com/watch?v=_EwHuF8X…
1
1
2
1,061
1 Apr 2025
*Proudly made on a MuSHR (mushr.io/) in the @fluentrobotics Lab @UMRobotics @UMich.
#robotics #multiagent #multirobot #artificialintelligence
1
44
2 Mar 2025
How can we enable robots to fluently collaborate with humans on physically demanding tasks?
🧵 about our #HRI2025 paper! @HRI_Conference
1
1
4
613