
Nope, he just had a phone. Below a certain speed, Iphones see small changes in barometric pressure as "flights of stairs". Steps not required. It will also count steps if the accelerometer records stepllike events. Go walk up hill in a park and down.. "stairs"
1
2
61

You keep conflating step counts with raw accelerometer data. The accelerometer always gets triggered when it logs steps. But steps aren't always logged when the accelerometer is triggered (although the accelerometer data is still logged), hence the reason why the phone recorded movement at 6:04 but didn't record any steps until 10 minutes later.
Whiffin said there was an 8-second period around 12:38 when he couldn't rule out JOK being in the house. Not the whole night. And it didn't encompass the whole property at all. Just a corner of the house.
But we're getting distracted. How do you think the phone got into the house?
1
1
13

There are situations where the accelerometer wouldn’t record steps. You’re missing the entire point which is if the state police actually did a real investigation, they would know exactly how John ended up there instead of going along with Jen’s theory. There’s too much confusion with the time his phone actually last registered activity and it’s actually 12:33 and some odd seconds. The phone does light up at the slightest movement…but it doesn’t record steps at the slightest movement Randall that’s what I’m saying here. It needs two very specific events to record a step so it doesn’t give step credit for non-steps. It’s very likely that if he was being carried and placed with his phone somewhere on his body then steps wouldn’t be recorded. You asked for a theory on how it would be possible…there it is. Keep trying to explain away with a bunch of shit, it’s really simple. John wasn’t hit by a car. There’s 3 flights of stairs in his health data that are the subject of major conflict and went unexplored by MSP. Whiffin even admits his location data encompasses the entire property of Fairview rd and he could not rule out that he was in the house for a period of time.
1
18

E03Z1 shows the primary accelerometer. According to the notes in the file: column 1 contains the sensor sample time in seconds after the start of the Descent mode, column 2 contains the measured acceleration from the primary, or Z1, axial sensor.
1
4
A "dead zone" is completely irrelevant when it comes to any data logged by the accelerometer. It doesn't rely on cell service or wifi at all. It's why your phone continues to log steps while in airplane mode.
I suggest you go back to the drawing board and come up with a cohesive theory that explains how John went into the house and ended up on the lawn while his phone remained stationary from 12:32 to 6:04.
1
13
The 6:04 timestamp was triggered by the accelerometer detecting a change in velocity (likely during CPR), not steps. Steps weren't recorded until 10 min later.
So I find it very hard to believe picking up a dead body and placing it on the lawn with a phone in the back pocket would not trigger the accelerometer to detect a similar change in velocity, especially because an iphone screen lights up at the slightest nudge.
How do you think the phone got into the house?
7
The accelerometer is exactly what needs the “jolt” from your leg hitting the ground…that’s what you’re getting confused and I think not fully understanding. It’s exactly what’s explained in the 3 pictures. Without the two specific movements listed in the photos…it’s not going to record steps on the accelerometer. You’re wrong.
1
11
It's true steps wouldn't be tracked in Apple Health, but the raw accelerometer data would still pick up on the movement.
The only way you could get around it is if you had a conveyor belt going to the house to the lawn (although the accelerometer would still log the phone getting on and off the conveyor belt).
The raw accelerometer data is how we know the phone started moving at 6:04 but steps weren't actually logged until about 10 minutes later, bunghole. 😆
2
14

Machine for Sale
Delta 43-791 Shaper W/4 Roll Delta Power Feed
Location: Kingston, TN - Price: $3500.00
<object width="400" height="287"><param name="movie"
<iframe width="560" height="315" src="youtube.com/embed/FkaGPU1HMC…" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share" ...

1
8
The "bubble" is GPS data (which I haven't even touched on yet). It shows a brief blip of low-accuracy data extending into the house for 8 seconds around 12:38. Every other GPS reading puts the phone on the lawn.
But honestly, the GPS doesn't even matter for this conversation. All it does it corroborate the movement data, which comes from the phone's accelerometer. It's the same internal sensor that counts your steps and has nothing to do with GPS, cell service, or WiFi.
That sensor shows the phone didn't move at all from 12:32 until 6:04. And since the phone was found under John's body, that indicates he was likely on the lawn all night.
11

Thanks! It's been interesting to see how much of these algorithms are from public clinical data. Devices collect the data, then algorithms apply during syncs. Some accelerometer or feature specific algorithms seem to be on device IIRC
7
Kamil (๑ت๑)ノ🛩 retweeted

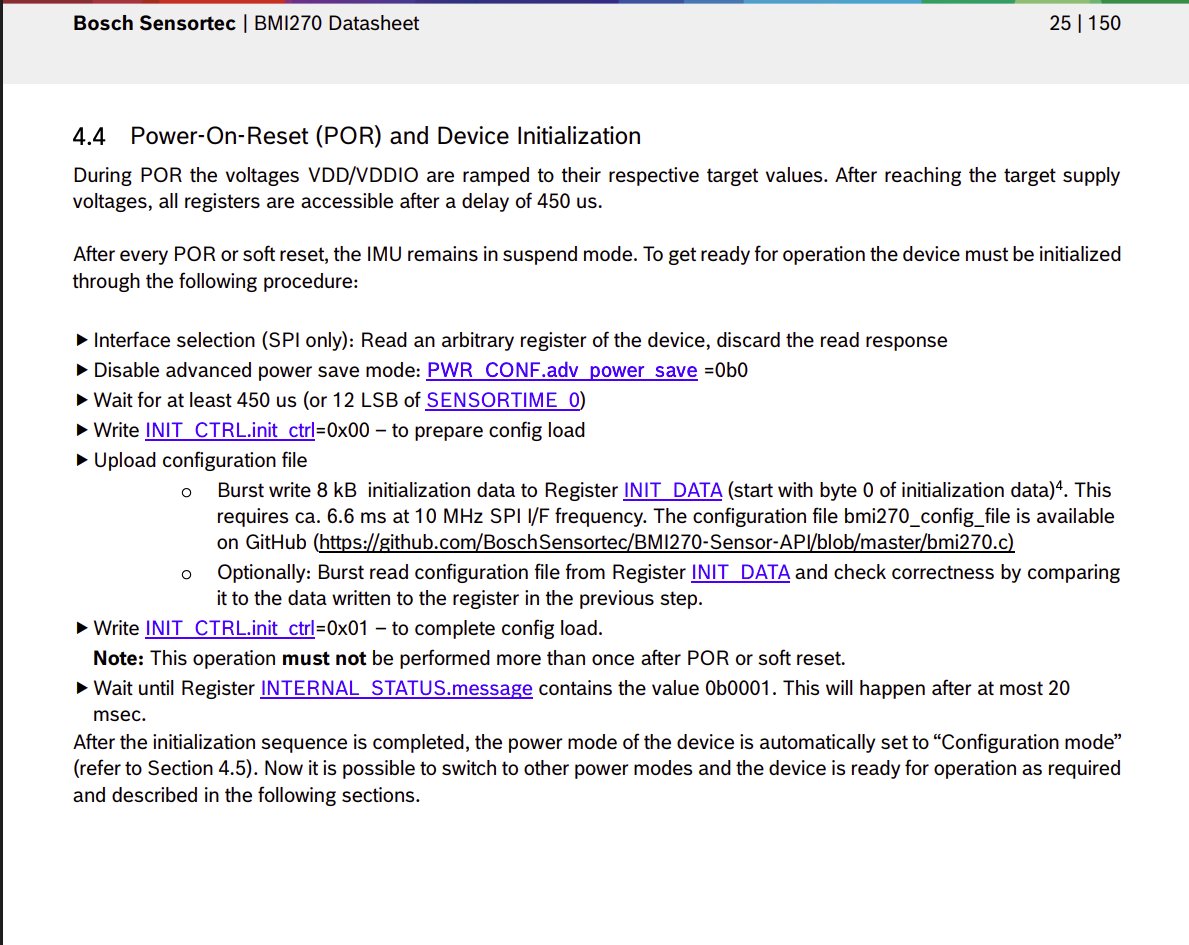
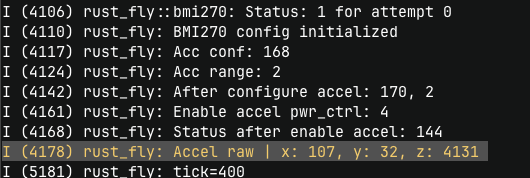
I'm finally reading accelerometer from BMI270. Took me today around 4 hours to achieve just that.
Progress so far:
- implemented BMI270 soft reset dummy SPI read
- disabled advanced power save
- uploaded Bosch BMI270 config blob via
INIT_DATA
- completed config load
- configured accel to 400 Hz, ±8g
- enabled accel and read plausible raw data: around z ≈ 1g
The most useful resources for controlling BMI270 so far:
1. Cheatsheet from Bosch: bosch-sensortec.com/media/bo…
2. Open source code from Bosch written in C:
github.com/boschsensortec/BM…
Next: bring up gyro.
Jun 13

I've never who have thought that I would be doing low-level programming like this, but here I am doing:
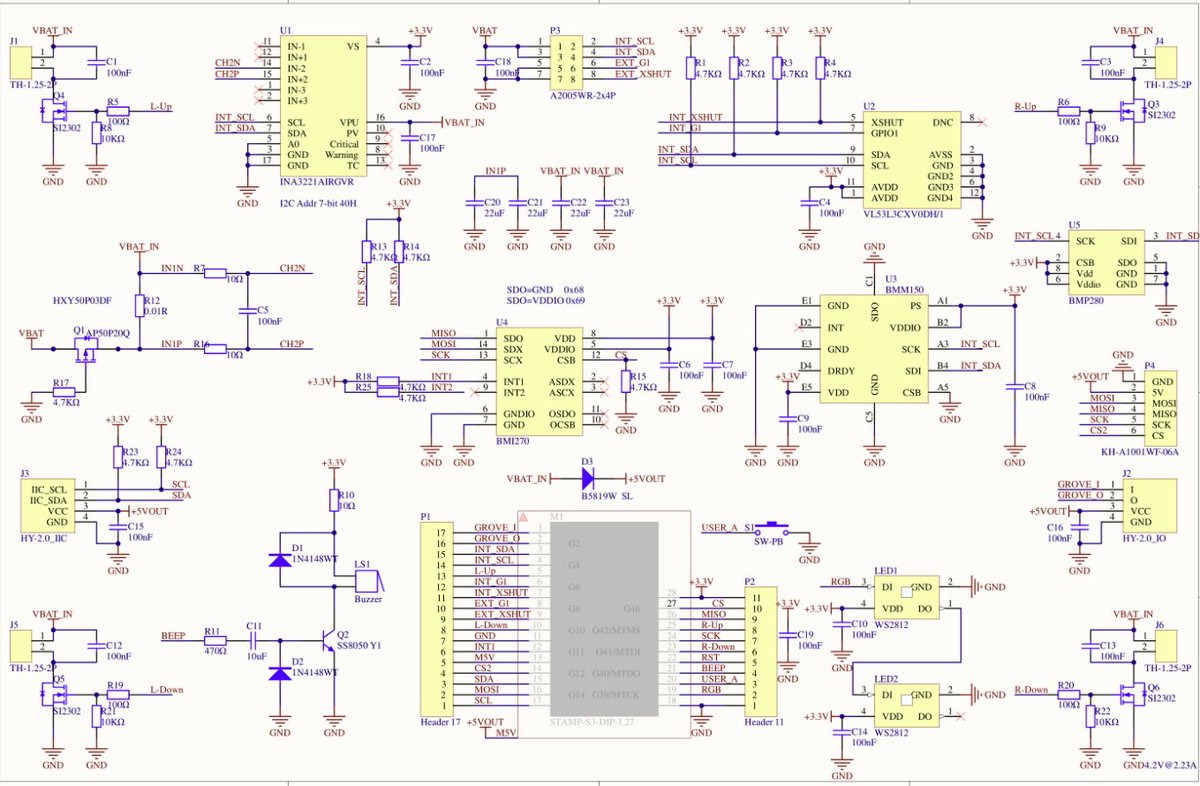
- Reading schematics to identify BMI270 SPI wiring
- Mapping StampFly nets to ESP32-S3 GPIOs
- Reading BMI270 registers over raw SPI
- Debugging shared SPI bus chip-select issues
- Holding PMW3901 CS high so it doesn’t corrupt BMI270 reads
- Parsing datasheet register bits
- Verifying every hardware step with readback logs
- Writing PWR_CONF to disable advanced power save
I'm might be overdoing it, but looks like that's what I need to go through to read gyro reliably. I just found myself doing it all by myself instead of grabbing some crate. If it goes far too long or will be out of reach of my abilities, I will need to look for some crate that would solve all of those for me (if it exists, i found one candidate).
So far, it has been a lot of fun. TOO much even, I've never done things like this.
1
1
106

I can't comprehend how this works without a camera. I thought it was using the gyro or accelerometer: like having it pick a starting point and then move the model with the phone. But then the phone stays static in the second half... and now I'm confused lol. Camera off screen?
391

9h
📌 Slimme deurbel of slimme dataverzamelaar?
Consumenten kiezen voor slimme beveiliging om meer controle en veiligheid te krijgen. Ironisch genoeg blijkt juist die zoektocht naar veiligheid nieuwe vragen op te roepen over privacy, transparantie en vertrouwen. Het EFF-onderzoek laat zien dat achter een eenvoudige deurbelapp een omvangrijk netwerk van trackers schuilgaat dat veel meer gegevens verzamelt dan veel gebruikers waarschijnlijk verwachten.
📊 DE FEITEN
Uit onderzoek van de EFF naar versie 3.21.1 van de Android-app van Ring bleek dat gegevens worden gedeeld met meerdere externe analyse- en marketingbedrijven.
📡 Ontvangers van gegevens: Facebook (Graph API), Branch .io, AppsFlyer, MixPanel, mogelijk Google Crashalytics
📱 Verzamelde gegevens zijn onder andere naam en e-mailadres, unieke apparaat-ID's, IP-adressen, mobiele provider, taalinstellingen, schermresolutie, apparaatmodel, installatiedatum van de app en gebruiksgegevens binnen de applicatie
🔍 Sensorinformatie
AppsFlyer ontving volgens de onderzoekers zelfs gegevens over aanwezige sensoren zoals gyroscoop, accelerometer, magnetometer. Inclusief informatie over de kalibratie van deze sensoren.
⚠️ Opvallende bevindingen
Facebook ontvangt gegevens zodra de app wordt geopend. MixPanel ontvangt volgens het onderzoek de grootste hoeveelheid gebruikersinformatie, waaronder namen en e-mailadressen. Diverse trackers worden niet of slechts beperkt genoemd in de privacydocumentatie van Ring. Onderzoekers moesten gespecialiseerde technieken gebruiken om het netwerkverkeer zichtbaar te maken vanwege HTTPS-versleuteling en certificaatpinning.
🛠️ OPLOSSING
Bedrijven die slimme beveiligingsproducten aanbieden kunnen het vertrouwen van gebruikers versterken voor leveranciers en consumenten.
Voor leveranciers
✅ Volledige transparantie over alle gebruikte trackers
✅ Alleen gegevens verzamelen die noodzakelijk zijn voor de dienstverlening
✅ Expliciete toestemming vragen voor marketing- en analysetracking
✅ Gebruikers zelf laten bepalen welke gegevens gedeeld mogen worden
✅ Regelmatige onafhankelijke privacy-audits publiceren
Voor consumenten
✅ Privacyverklaringen kritisch beoordelen
✅ Tracking- en advertentie-ID's waar mogelijk beperken
✅ Regelmatig privacy-instellingen controleren
✅ Privacyvriendelijke alternatieven onderzoeken voordat een aankoop wordt gedaan
🧠 DE WAARSCHUWING
We hebben dit patroon eerder gezien. Sociale media-platformen begonnen ooit eveneens met beperkte gegevensverzameling die geleidelijk uitgroeide tot uitgebreide profielen van gebruikers. Achteraf bleek dat veel consumenten nauwelijks inzicht hadden in de omvang van die dataverwerking. Het risico bestaat dat slimme apparaten dezelfde ontwikkeling doormaken: producten die worden gekocht voor gemak of veiligheid veranderen ongemerkt in permanente bronnen van gedragsdata. Wanneer gebruikers pas jaren later ontdekken welke informatie wordt verzameld, is het vertrouwen vaak al beschadigd.
🏛️ TOT SLOT
Privacywetgeving zoals de AVG stelt steeds hogere eisen aan transparantie, proportionaliteit en geïnformeerde toestemming. Tegelijkertijd groeit de maatschappelijke discussie over de combinatie van particuliere camerabewaking, commerciële tracking en toegang tot beeldmateriaal door overheidsinstanties.
Het onderzoek van de EFF laat zien dat deze discussie niet langer alleen gaat over camera's, maar ook over de verborgen datastromen achter de apps die deze systemen aansturen. Volgens de onderzoekers profileert Ring zich als een bedrijf dat veiligheid en privacy centraal stelt, terwijl de app in de praktijk grote hoeveelheden gegevens deelt met derden.
Voor organisaties die werken met beveiliging, slimme technologie of persoonsgegevens ligt hier een duidelijke les: vertrouwen is geen marketingboodschap. Vertrouwen ontstaat door aantoonbare transparantie.
------
Kleo maakt content over bouwen en wonen. En snapt niet dat zo veel buren de straat blijven filmen. Dit schrijven kwam tot stand met ChatGPT op basis van een artikel uit 2020, link in de eerste comment. Is de situatie inmiddels drastisch gewijzigd? Dat vraag ik mij toch wel af.
![Een kijkje achter de videodeurbel [notebooklm]](https://venexa.site/media/HKyR9t_WEAAyaA5.jpg)
ALT Een kijkje achter de videodeurbel [notebooklm]
1
1
9

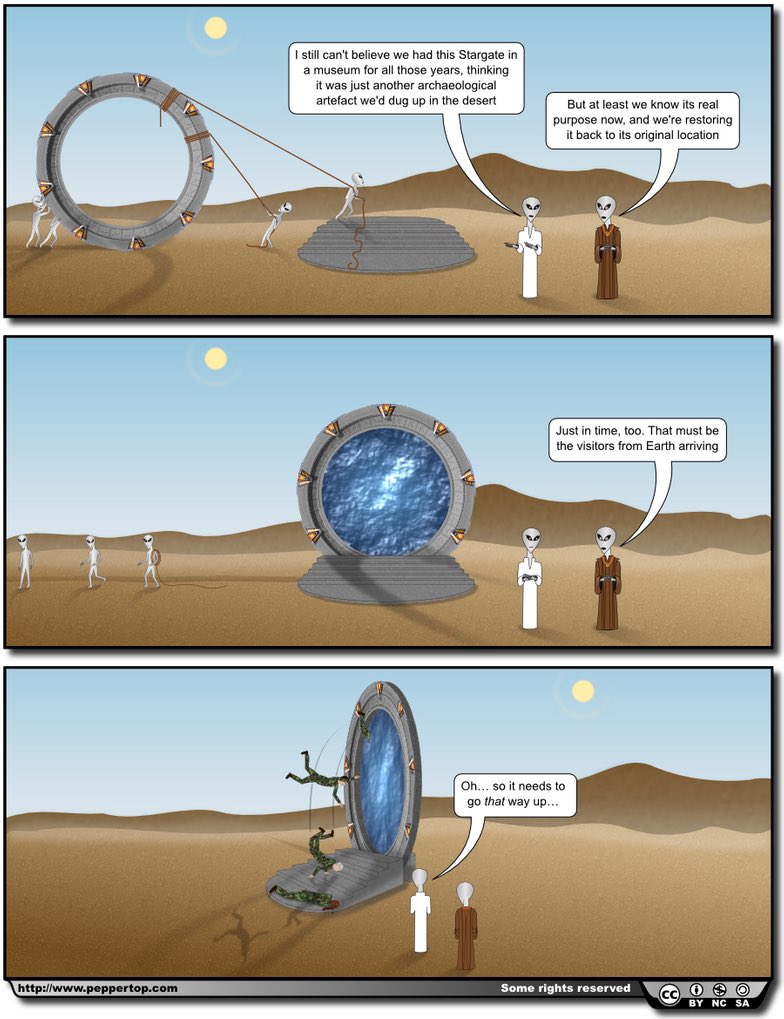
I suspect it would be fairly trivial for the Ancients to add an accelerometer and then adjust the aperture orientation accordingly.
#SaveStargate @AmazonMGMStudio #DialTheGate
The one that really bakes my noodle, though, is how this would work for space gates. When a puddle jumper enters the wormhole via space gate, it always enters the Atlantis control tower right side up. There would have to be some kind of detector on the space gate that could transmit orientation data through to the receiving gate. This would be straight-forward if they hard-coded the parameters for a puddle jumper, I suppose.
Jun 13

Another Stargate meme found in the wilds of Reddit. It does seem challenging to distinguish the top of the ring from the bottom!
#SaveStargate @AmazonMGMStudio
1
14

12h
Meanwhile in Mustang <iframe width="560" height="315" src="youtube.com/embed/bejyRr7Tmj…" title="YouTube video player" frameborder="0" allow="accelerometer; autoplay; clipboard-write; encrypted-media; gyroscope; picture-in-picture; web-share" referrerpolicy="strict-origin-when-cross-origin" allowfullscreen></iframe>
11



Lithium-polymer batteries (Li-Po): 70-80% of global drone batteries are manufactured in China (CATL, BYD, ATL, etc.).
Features: High discharge rate, lightweight, and inexpensive; US-developed batteries of the same level cost 2-4 times more.
Hornet: Range approximately 150 km, endurance 1-1.5 hours, requires high-energy-density lithium batteries, almost certainly Chinese cells/modules.
Brushless motors ESCs: The core of the motor is rare-earth neodymium iron boron magnets: China accounts for 85-90% of global production capacity.
Low-cost military/suicide drones: Extensively use external rotor brushless motors ESCs from Chinese companies like DJI, Langyu, and Yinyan.
US assessment: The motor is "extremely difficult to replace," and the US has almost no low-cost civilian production capacity.
Flight Control Core Board (MCU Inertial Sensors)
Main Control MCU: Mostly STM32 (28–72 nm), with wafer fabrication/packaging largely done in China/Taiwan.
Inertial Measurement Unit (IMU: Gyroscope Accelerometer): 90% of low-to-mid-range MEMS are manufactured/packaged in China.
Public reports: The vast majority of drones on the US "Blue List" certification were disqualified because they used Chinese IMUs/MCUs.
Hornet: Uses an integrated single-board flight control system (Russian teardown analysis), highly integrated, making it extremely difficult to completely avoid Chinese components.
GPS/BeiDou/GLONASS Positioning Modules
A large portion of inexpensive navigation modules (such as the U-blox series) are assembled and tested in China.
Even with US chips, the modules and peripheral circuits are mostly manufactured in China.
Camera/Image Transmission (Analog/Digital)
Lens assembly, CMOS packaging, image transmission modules: China accounts for over 70% of global production capacity.
Hornet: Dual front-facing cameras (day/night) video feedback; these modules are almost all made in China for drones in the same price range.
Connectors, ribbon cables, passive components (resistors/capacitors/inductors)
Basic electronic components: China is the world's largest production base, with a significant cost advantage.
Body materials (auxiliary)
The Hornet's main body is made of polystyrene foam carbon fiber/glass fiber composite materials.
Carbon fiber: China accounts for approximately 30% of global production capacity, offering a significant price advantage for civilian-grade products.

Przechwycony egzemplarz amerykańskiego drona uderzeniowego Hornet pokazuje coś ważniejszego niż samą konstrukcję. Pokazuje zmianę sposobu walki z logistyką.
Hornet jest opisywany jako niewielki, płatowcowy dron uderzeniowy średniego zasięgu, wykorzystywany przez Ukraińców do ataków na rosyjskie pojazdy, transport paliwa i ruch logistyczny na zapleczu frontu. W źródłach pojawia się zakres 50–150 km, ale tę liczbę trzeba traktować ostrożnie. Przy masie rzędu 15 kg, głowicy około 4–5 kg, rozpiętości około 2,2 m i prędkości przelotowej około 100–120 km/h, wartość 150 km wygląda raczej na górną granicę w bardzo korzystnym profilu lotu, a nie na pewny, powtarzalny promień bojowy przy klasycznym starcie z ziemi.
To zastrzeżenie jest istotne, bo w ostatnich dniach pojawiły się informacje o testach Horneta wynoszonego przez balon/aerostat na wysokość około 8–8,25 km. Po wypuszczeniu dron miał przelecieć szybowaniem około 42 km i zachować większość energii w akumulatorze. Taki profil całkowicie zmienia rachunek zasięgu, bo platforma nie zużywa energii na start, wznoszenie i długi lot w gęstym powietrzu przy ziemi. Dopiero w takim wariancie wartości rzędu 150 km i więcej zaczynają wyglądać technicznie wiarygodniej.
Z materiałów rosyjskich i ukraińskich wynika, że Hornet ma dwie kamery, jedną skierowaną do przodu, drugą w dół. Ten układ sugeruje nie tylko klasyczne naprowadzanie na cel, ale też wsparcie orientacji terenowej i pracy algorytmów wizyjnych. To ważne w środowisku, gdzie GPS może być zakłócany, a sam lot do celu nie może opierać się wyłącznie na zwykłej nawigacji satelitarnej.
Najważniejszy wniosek nie dotyczy więc samej liczby kilometrów. Hornet wypełnia lukę między klasycznym FPV a dużymi dronami dalekiego zasięgu. FPV działa głównie w pobliżu linii styczności. Duże drony uderzają w cele strategiczne, rafinerie, składy, zakłady przemysłowe. Hornet i podobne platformy pracują pośrodku, czyli tam, gdzie znajduje się realny krwiobieg armii: drogi, cysterny, ciężarówki, punkty przeładunkowe, warsztaty, mosty i zaplecze brygad.
To jest właśnie sens ukraińskiej kampanii „middle strike”. Guardian opisuje działania przeciwko rosyjskiej trasie R-280, nazywanej już „highway of death”, jako systematyczne uderzenia na logistykę na głębokości około 20–200 km za frontem. Ukraińcy twierdzą, że na wybranych odcinkach ruch wojskowych ładunków spadł nawet o 71% w ciągu dwóch tygodni. Tę liczbę trzeba traktować jako deklarację strony walczącej, ale sam trend jest spójny z innymi doniesieniami: rosyjskie zaplecze staje się coraz mniej bezpieczne.
Dlatego Hornet nie powinien być opisywany jako „kolejny dron kamikaze”. To element szerszego modelu: tania lub relatywnie tania amunicja krążąca średniego zasięgu, wsparta obserwacją, algorytmami wizyjnymi, łącznością i rozpoznaniem tras. Jej zadaniem nie jest jednorazowy efekt medialny, ale systematyczne duszenie ruchu logistycznego.
Dla wojsk lądowych to poważna lekcja. Współczesna logistyka nie może zakładać, że 50 czy 100 km od frontu zaczyna się bezpieczne zaplecze. Ochrona konwojów, rozproszenie, maskowanie, mobilne C-UAS, kontrola emisji elektromagnetycznej, obserwacja tras i szybka zmiana korytarzy ruchu stają się tak samo ważne jak same pojazdy i magazyny.
Hornet pokazuje więc nie tylko nową platformę, ale nowy problem operacyjny. Zaplecze przestaje być zapleczem. Staje się częścią pola walki.


3
3
557