
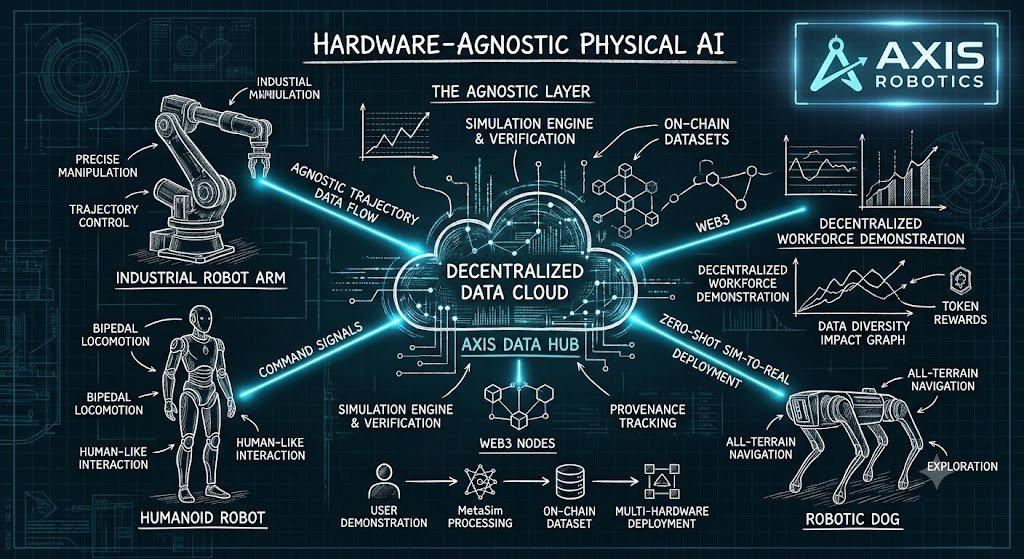
Trong nghiên cứu DePIN, một giao thức hạ tầng mạnh phải có tính độc lập với phần cứng. Đây là điểm cốt lõi trong mô hình của @AxisRobotics. Thay vì tự sản xuất robot, Axis tập trung xây dựng một lớp phi tập trung.
Dữ liệu quỹ đạo thu thập qua MetaSim có thể được chuẩn hóa và triển khai chéo trên nhiều thiết bị—từ cánh tay công nghiệp đến robot hình người của Robotics. Bằng cách tách biệt mô hình AI khỏi phần cứng vật lý, Axis giải quyết bài toán phân mảnh của ngành tự động hóa, tạo ra một tiêu chuẩn dữ liệu mở cho toàn bộ hệ sinh thái. 🦾
2
4
45

Jun 10
You can harvest all the text and images on the web, but you cannot scrape the chaotic, real-world physics of moving atoms from a static page.
That’s why @axisrobotics MetaSim architecture is brilliant. By decoupling heavy physics simulation from a lightweight web interface
2

9/ The future of robotics will not be built by collecting more data alone. It will be built by creating better simulation pipelines. And MetaSim is showing what that future looks like.
@axisrobotics

10
1/ How do you simulate a complex robotic skill in a virtual environment and have it work accurately in the real world? This is one of the biggest challenges in Physical AI.
@AxisRobotics
is tackling it with MetaSim a unified infrastructure layer for Physical AI.
1
16
9/ The future of robotics will not be built by collecting more data alone.
It will be built by creating better simulation pipelines.
And MetaSim is showing what that future looks like.
@axisrobotics

9
1/ How do you simulate a complex robotic skill in a virtual environment and have it work accurately in the real world?
This is one of the biggest challenges in Physical AI.
@AxisRobotics is tackling it with MetaSim a unified infrastructure layer for Physical AI.
1
10


Jun 3
“Axis Robotics” @axisrobotics (BASE)
Main activity: Build a decentralized infrastructure to collect, clone and process training data for Physical Artificial Intelligence (Physical AI) through a simulated environment
Goals/
-Create infinite data: Use simulation architecture (MetaSim) to create a huge amount of data for robots.
-Scaling up: Become a basic infrastructure layer that helps accelerate and scale AI applications in the real world.
-Comprehensive automation: Complete the process from task setting, model training to deploying directly on real robots
Rewards for users/
When participating, user's contribution data is saved on the blockchain and has the opportunity to receive rewards worthy of contributions in the future.
If you find the project worth following, please visit the official page of the project for more information and how to participate .
Thanks Rikai
5
17
369

Jun 1
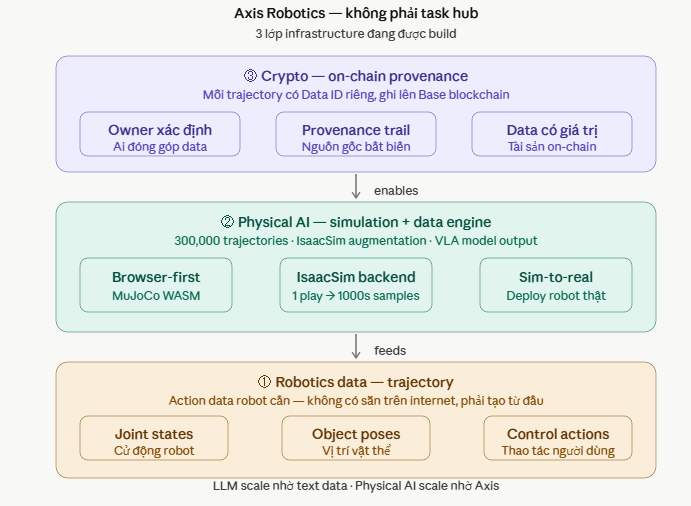
10/ Tóm lại, 3 lớp Axis đang thật sự build:
① Data engine — 300K trajectories, augmented bằng IsaacSim
② Simulation infra — MuJoCo WASM MetaSim, đã upgrade state replay
③ On-chain provenance — mỗi data point có owner trên Base
Khi 3 lớp này hoạt động cùng nhau, đây không còn là task hub nữa.
2
3
159

@axisrobotics verifies robotic training data through automated trajectory replay, quality evaluation, MetaSim cross-simulation validation, high-fidelity physics testing, and blockchain-based provenance, ensuring reliable,reproducible, secure, and trustworthy AI-ready datasets.

10
10
39

May 29
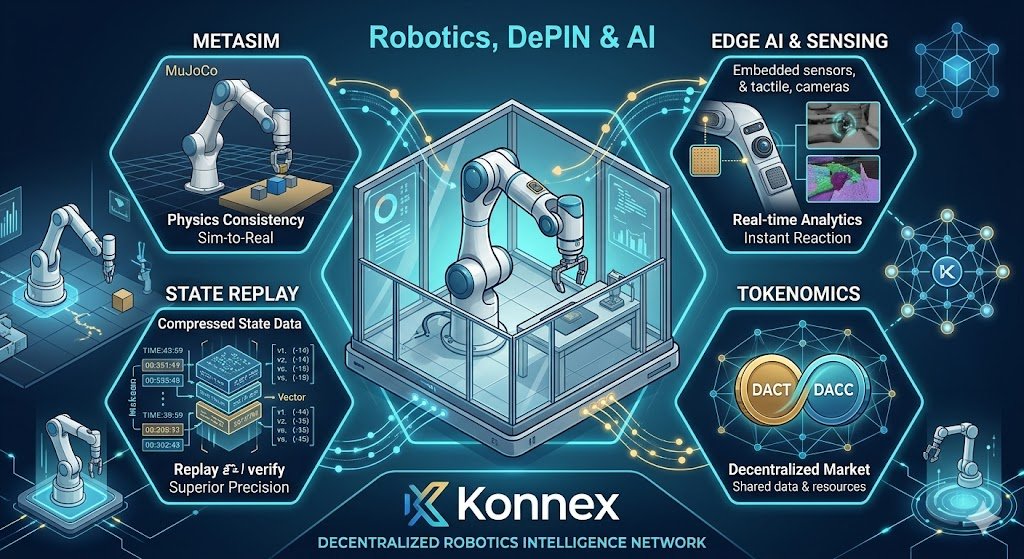
The tech powerhouse driving @konnex_world seamless Sim-to-Real transition: MetaSim & State Replay
Bridging the gap between virtual training and physical execution has never been this efficient:
1️⃣ MetaSim: Simulation evolved. By training robots within advanced virtual environments (like MuJoCo), we radically slash real-world data costs, minimize deployment risks, and accelerate AI learning curves.
2️⃣ State Replay: Moving beyond simple action logging, our backend focuses on reproducing core "states". The payoff? Highly compressed training data, superior precision, and flawless physical consistency when deployed on hardware like Franka robot arms.
The future of decentralized AI robotics is being built right here.
#KonnexWorld #Robotics #DePIN #AI #SimToReal #Web3
1
2
23

Tương lai của robot không nằm ở phòng thí nghiệm, nó nằm trên trình duyệt của bạn.
Đã qua rồi cái thời việc huấn luyện robot chỉ giới hạn trong các phòng lab đắt đỏ với thiết bị chuyên dụng. Với @axisrobotics, toàn bộ quy trình này được gói gọn vào một kiến trúc 4 lớp (L1 đến L4) mạnh mẽ, kết nối con người và AI ngay trên trình duyệt web,. Cùng bóc tách cách "cỗ máy" này hoạt động!
1/ Lớp 1 (L1) — World Generation (Xây dựng thế giới ảo) Để AI học cách tương tác với thế giới, nó cần một môi trường. Chỉ từ những câu lệnh ngôn ngữ tự nhiên đơn giản (như "nhặt món đồ chơi"), L1 sẽ tự động sinh ra các môi trường mô phỏng hoàn chỉnh. Lớp này sử dụng ngôn ngữ MetaSim để lấy dữ liệu từ thư viện hơn 2.000 vật thể 3D, từ đó sắp xếp bố cục, cài đặt tính chất vật lý và xuất ra các định dạng tương thích với mọi loại giả lập.
2/ Lớp 2 (L2) — Behavior Collection (Thu thập dữ liệu trên trình duyệt) Đây là lúc bạn tham gia! L2 sẽ đặt bạn vào thế giới ảo của L1 để điều khiển robot hoàn thành nhiệm vụ. Điểm kỳ diệu là nền tảng này sử dụng MuJoCo WASM, cho phép chạy giả lập vật lý trực tiếp trên trình duyệt web máy tính. Bạn không cần GPU hay cài đặt phần mềm, chỉ cần dùng bàn phím điều khiển cánh tay máy và mọi hành động của bạn sẽ được ghi lại thành các quỹ đạo (trajectories).
3/ Lớp 3 (L3) — Data Refinement (Tăng cường dữ liệu bằng GPU server) Làm sao để 1 hành động điều khiển của con người biến thành hàng ngàn bài học cho AI? Dữ liệu thô từ web sẽ được làm sạch (lọc lỗi, làm mượt) và đưa lên các máy chủ GPU chạy giả lập IsaacSim. Tại đây, hệ thống áp dụng kỹ thuật Domain Randomization, liên tục thay đổi góc camera, ánh sáng, vật liệu và trọng lượng vật thể, nhân bản thao tác của bạn thành hàng nghìn mẫu dữ liệu siêu thực.
4/ Lớp 4 (L4) — Model Training & Deployment (Huấn luyện mô hình AI) Lớp cuối cùng là nơi "bộ não" thực sự hình thành. Nguồn dữ liệu hoàn hảo từ L3 sẽ được sử dụng để huấn luyện các mô hình như Vision-Language-Action (VLA),. Các mô hình AI này không chỉ được đánh giá qua nhiều môi trường ảo mà còn được triển khai thực tế thành công lên phần cứng vật lý (như cánh tay máy Franka Research 3) với độ chính xác cao.
5/ Tổng kết: Với cấu trúc chia tách hoàn hảo: L1 tạo môi trường, L2 thu thập hành vi qua web, L3 tăng cường dữ liệu trên đám mây và L4 huấn luyện mô hình. AXIS đã giải quyết bài toán cốt lõi của Physical AI: thiếu hụt dữ liệu. Bạn có thể trở thành một phần của kỷ nguyên này bằng cách tự mình điều khiển robot và đóng góp dữ liệu ngay hôm nay.
@LihThooi @chris_anm01 @mintt_34 @irisle_growth


6
12
835

i’ve been following @axisrobotics pretty early and the deeper i looked into it the more i realized this project is way more than just another “do tasks earn points” platform
what they’re actually trying to build is infrastructure for physical AI meaning AI that can control real-world robots
the most interesting part for me is how they approach the data problem
in robotics today the biggest bottleneck isn’t really the model itself but high-quality manipulation data
training robots is much harder than training LLMs because robots need to understand physics 3D space collisions force grip angles and object interaction
being off by a few centimeters can completely fail a task
that’s also why companies like Figure Tesla Optimus and even OpenAI Robotics burned massive amounts of money on data collection
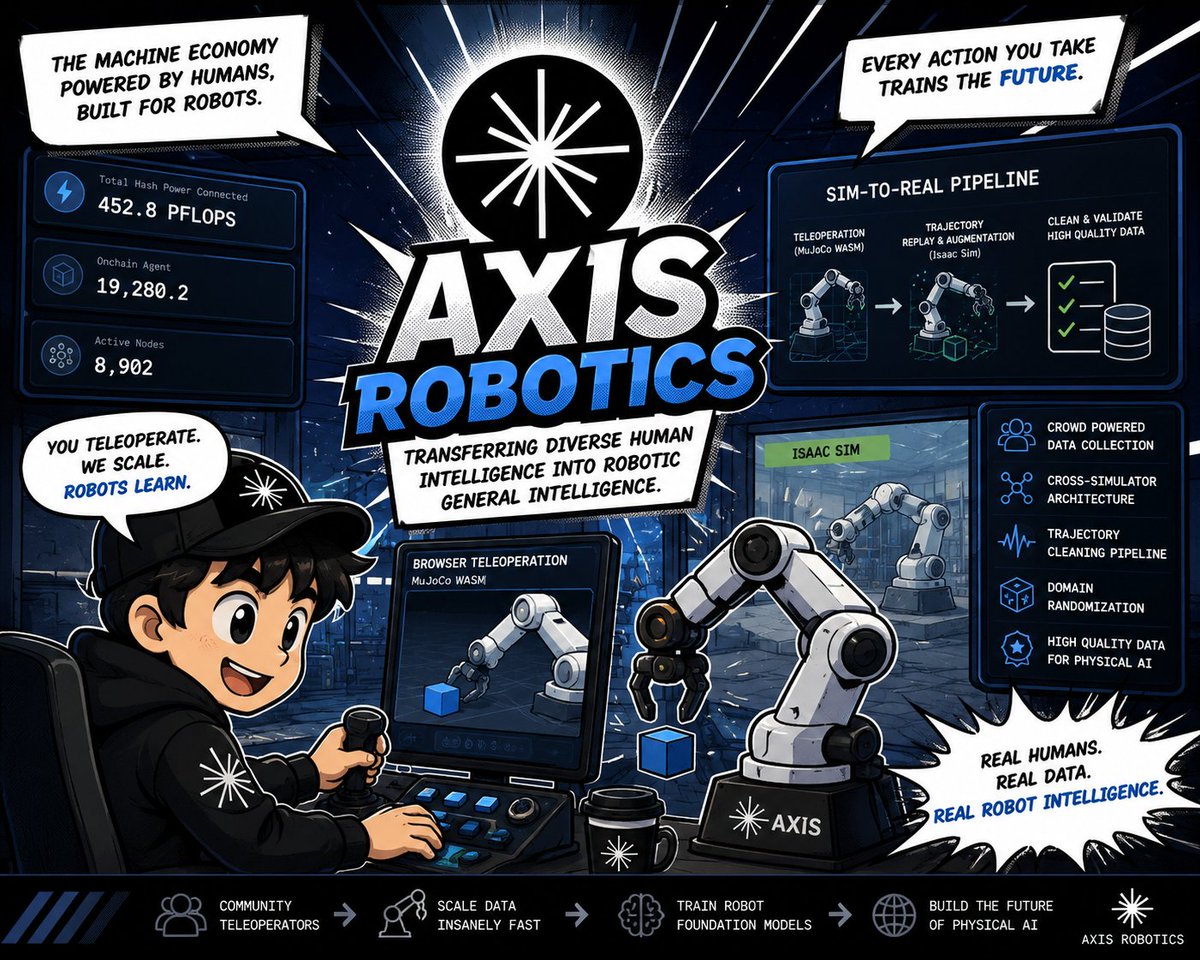
Axis is taking a pretty different route by basically turning the community into human teleoperators
users enter a browser simulator control a robot arm inside MuJoCo WASM while the backend replays the full trajectory inside IsaacSim for augmentation and domain randomization
this part matters a lot because they’re not just collecting random gameplay data
they’re actually building a sim-to-real pipeline which is something most people completely overlook when talking about the project
after reading through the technical docs i noticed they’re using something called RoboVerse MetaSim architecture
the interesting part is that task definitions are not locked into a single simulator
a trajectory generated in MuJoCo can later be replayed inside IsaacSim without rebuilding the format
people outside robotics probably won’t realize how difficult this actually is because every simulator uses different physics engines coordinate systems and asset structures
Axis is basically trying to solve the fragmentation problem inside robotics simulation
another thing i found interesting is their trajectory cleaning pipeline
they run smoothing spline resampling hesitation removal and replay validation before pushing data into the training pool
that matters because crowdsourced robot data is usually extremely noisy
without proper filtering the model quality becomes terrible very quickly
in my opinion the biggest strength of Axis is scalability
browser-based teleoperation allows them to scale data collection insanely fast without deploying physical robots to users
but at the same time i still question where their real moat is
right now the narrative of “AI robotics crypto crowdsourcing” sounds very attractive but eventually the real value still depends on model performance
so far Axis has shown a lot of infrastructure and pipeline work but there’s still limited public evidence around benchmark performance or real-world policy generalization
another issue is that simulation will always have sim-to-real gaps
even with IsaacSim physics simulation still cannot perfectly reproduce the real world and the whole robotics industry is still struggling with this problem
personally i don’t see Axis as a short-term hype project
it feels more like an infrastructure data accumulation phase where they’re building the foundation first
if they actually manage to scale high-quality robotics data the long-term upside could be huge
because embodied AI is becoming one of the strongest trends in 2025–2026
but reaching the level of a true robot foundation model that works reliably in the real world is still a very long journey
most people currently see Axis as a point farming project
personally i think they’re attempting to build something closer to “RLHF for robots”
and honestly when you look at it from that angle the project becomes way more interesting than it first appears
40
1
35
758

May 25
axisrobotics metasim data trajectories need precise validation to filter simulation bots
3

AXIS ROBOTICS : KHI AI VẬT LÝ KHÔNG CÒN LÀ ĐỘC QUYỀN CỦA BIG TECH
Trước giờ, để dạy một con robot biết làm việc, các phòng thí nghiệm truyền thống phải tốn hàng triệu USD để mua phần cứng và thu thập dữ liệu thủ công. Nhưng @axisrobotics xuất hiện để định nghĩa lại cuộc chơi bằng mô hình Hạ tầng phi tập trung cho AI vật lý (DePAI).
Thực tế, Axis mang lại những giá trị cốt lõi gì mà k cần vẽ vời hoa mỹ?
• Phá vỡ rào cản dữ liệu bằng Mô phỏng (Simulation):
Không giống LLM có thể cào dữ liệu từ Internet, robot muốn thông minh phải học qua tương tác vật lý. Axis xây dựng môi trường giả lập (MetaSim) giúp tạo ra nguồn dữ liệu hành trình gần như vô hạn mà k cần đầu tư phần cứng đắt đỏ.
• Biến người dùng thành người huấn luyện AI:
Dự án phi tập trung hóa quy trình thu thập dữ liệu. Người dùng phổ thông trên toàn thế giới chỉ cần lên web, làm nhiệm vụ điều khiển robot giả lập thực hiện các thao tác (gắp, thả, di chuyển) để tạo ra dữ liệu đào tạo chất lượng cao (như thử nghiệm "The Rose of the Little Prince" gom 10,000 dữ liệu chỉ trong 5 ngày).
• Kiếm tiền từ đóng góp dữ liệu (Data-to-Earn):
Mọi tương tác, phản hồi cảm biến và kết quả tác vụ từ người dùng đều được ghi nhận on-chain. Nhờ cơ chế Incentives của Web3, đóng góp của bạn củm chính là "tài sản" giúp tối ưu mô hình AI, và bạn sẽ nhận lại phần thưởng token xứng đáng.
• Ứng dụng thực tế ra đời thực:
Không dừng lại ở lý thuyết, Axis đã chứng minh mô hình crowdsourcing này hoàn toàn khả thi khi tái hiện thành công các dữ liệu thu thập từ người dùng lên cánh tay robot Franka ngoài đời thực.
🦾 Axis Robotics chính là cầu nối biến những hành động click chuột của cộng đồng thành trí tuệ cho robot ngoài đời thực. Cơ hội đóng góp sớm cho các campaign Testnet/Beta đang mở, k tham gia là bỏ lỡ làn sóng DePIN Physical AI của năm nay oy nà!


13
19
1,010
📌 SỰ THẬT VỀ AI ROBOTICS: ROBOT KHÔNG THỂ KHÔN LÊN NHỜ... LƯỚT WEB!
Tại sao @axisrobotics nắm giữ "chìa khóa vàng" giải quyết nút thắt nghẽn cổ chai của cả ngành?
- Có một sự thật mà nhiều người hay lầm tưởng: Con robot k thể thông minh lên chỉ nhờ đi cào text hay video 2D trên internet như cách mấy con chatbot ChatGPT, Claude đang làm đâu nà.
- Mấy con LLM đọc sách, đọc báo mạng thì khôn ra được, chứ robot muốn biết cầm cái ly k bị vỡ, mở cái cửa k bị kẹt thì nó phải va chạm, tương tác và "cảm nhận" được không gian 3D thực tế. Mà ngặt nỗi, data không gian 3D chất lượng cao trên internet hiện tại vừa hiếm vừa đắt đỏ kinh khủng. Đây chính là cái phanh chí mạng kìm hãm cả ngành robotics phát triển suốt thời gian qua.
Trong khi các dự án khác vẫn đang loay hoay với mớ video 2D kém hiệu quả, thì Axis Robotics lại chọn một lối đi riêng cực gắt và thông minh:
• Tạo dữ liệu vô hạn bằng giả lập: Họ đưa robot vào môi trường giả lập siêu thực (MetaSim & Isaac Sim) để tạo ra hàng triệu dữ liệu quỹ đạo 3D chuẩn công nghiệp. Khỏi tốn hàng tỷ đô test phần cứng ngoài đời cho dễ hỏng hóc, tối ưu chi phí cực kỳ.
• Kích hoạt sức mạnh DePIN: Thay vì tự làm một mình, Axis biến nó thành cuộc chơi toàn cầu. Đám đông (chính là tụi mình) sẽ tự tay training cho robot thông qua các task giả lập ngay trên Hub để tích lũy data thực tế về hành vi.
🍀 Giải quyết được bài toán nghẽn cổ chai về data bằng Web3 scalability, Axis đang tự xây cái hào sâu công nghệ cực lớn mà k phải dự án nào củm bắt chước được. Tech stack xịn sò thế này thì phe long-term hold tha hồ mà yên tâm nà! Mọi người thấy góc nhìn này của Axis có đủ thuyết phục để làm nên chuyện trong mùa này ko? Comment thảo luận với Mỹ nha! 👇

10
13
420