
May 22
Are the motor step angles the same? Do they have the same microstepping settings?
If you wire the motors in parallel on the same controller, they will all move together.
2
2
324


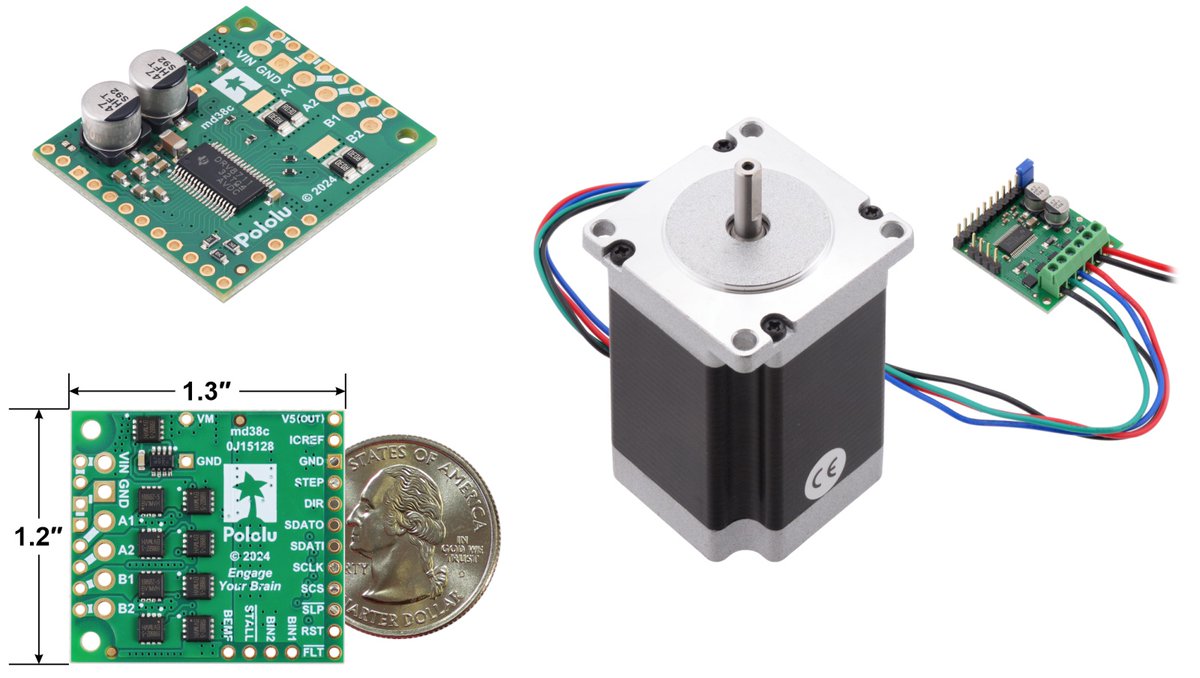
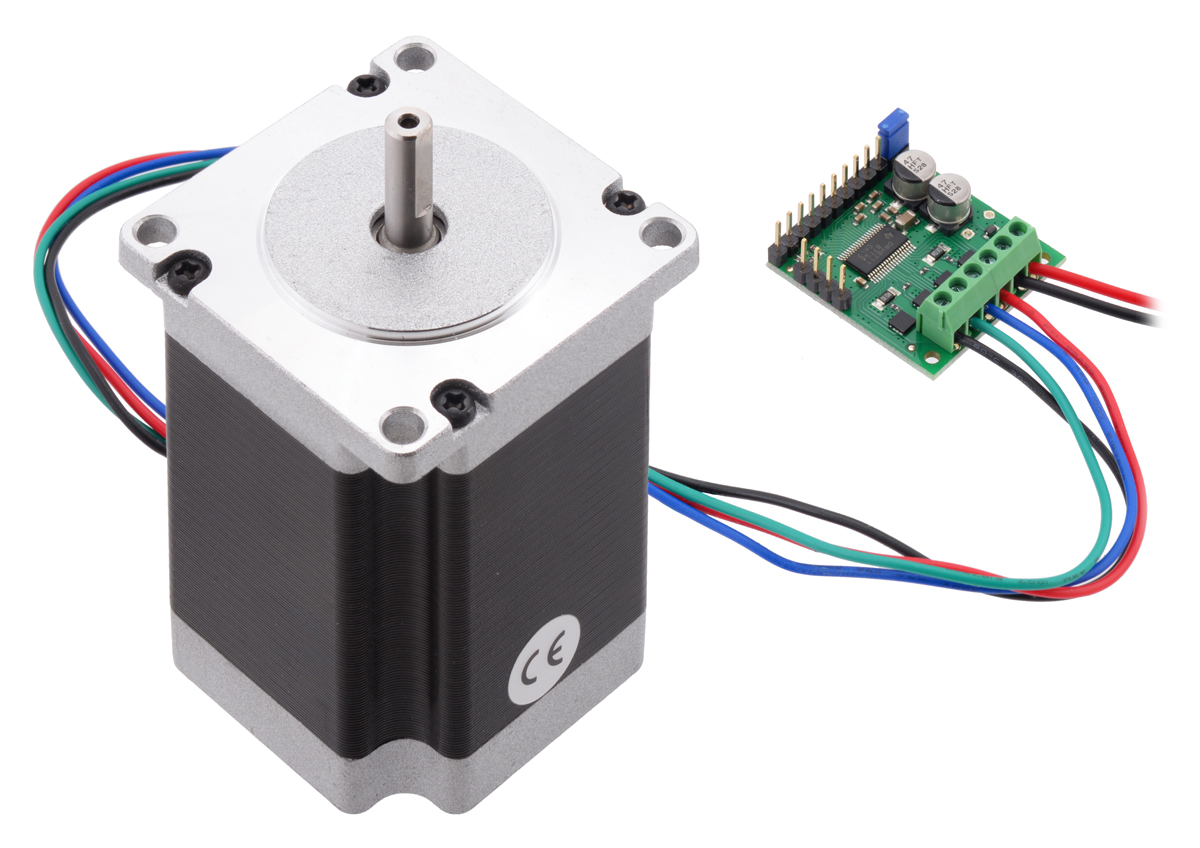
Product of the day: our compact High-Power Stepper Motor Driver 36v8 can control some pretty beefy stepper motors! 8A continuous per coil without heat sinks (11A peak), 8V to 50V operating range, and microstepping down to 1/256. Grab one today for $24!
pololu.com/product/3731?coup…
6
233

7 Dec 2025
for a single motor yep but for dual independent motors like this the small tolerance in step angle will prevent it coming back together so well unless some microstepping or very high spec motor no?
2
3
44
Product of the day: our compact High-Power Stepper Motor Driver 36v4 can control some pretty beefy stepper motors! 4A continuous per coil without heat sinks (6A peak), 8V to 50V operating range, and microstepping down to 1/256. Grab one today for $19.95!
pololu.com/product/3730?coup…
4
136

24 Sep 2025
EVs need quieter, smarter motion systems.
Novosense's NSD8389-Q1 stepper driver delivers 1/256 microstepping, stall detection, and built-in protections for lighting, thermal management, and display systems.
🔗Learn more: thecomponentclub.com/news/20…
#TCC #TheComponentClub #Novosense #MotorDrivers #AutomotiveElectronics #StepperMotor #MotionControl
2
31


4 Jun 2025
Just hit 30,000 steps on this linear actuator after microstepping to 1/16.
3
6
25
1,193

8 May 2025
Spinning up an STSPIN220 motor driver 🌀⚙️
This year, we've worked on adding more stepper drivers to our offerings. We kicked it off with the classic A4988 (adafruit.com/product/6109), followed up with the fan-favorite TMC2209 (adafruit.com/product/6121). Now we're circling back to one that's been on our list for a while—the STSPIN220 (digikey.com/short/f5nq47vq). It's compact, yet powerful, supporting up to 1/256 microstepping and 1A continuous current. Designed for low-voltage steppers, it maxes out at around 10V motor supply. We've included step and direction LEDs, a current adjustment pot that turns the right way, a 47µF bypass cap, and terminal blocks for power and motor control—making it super easy to use.
#robot #motors #power
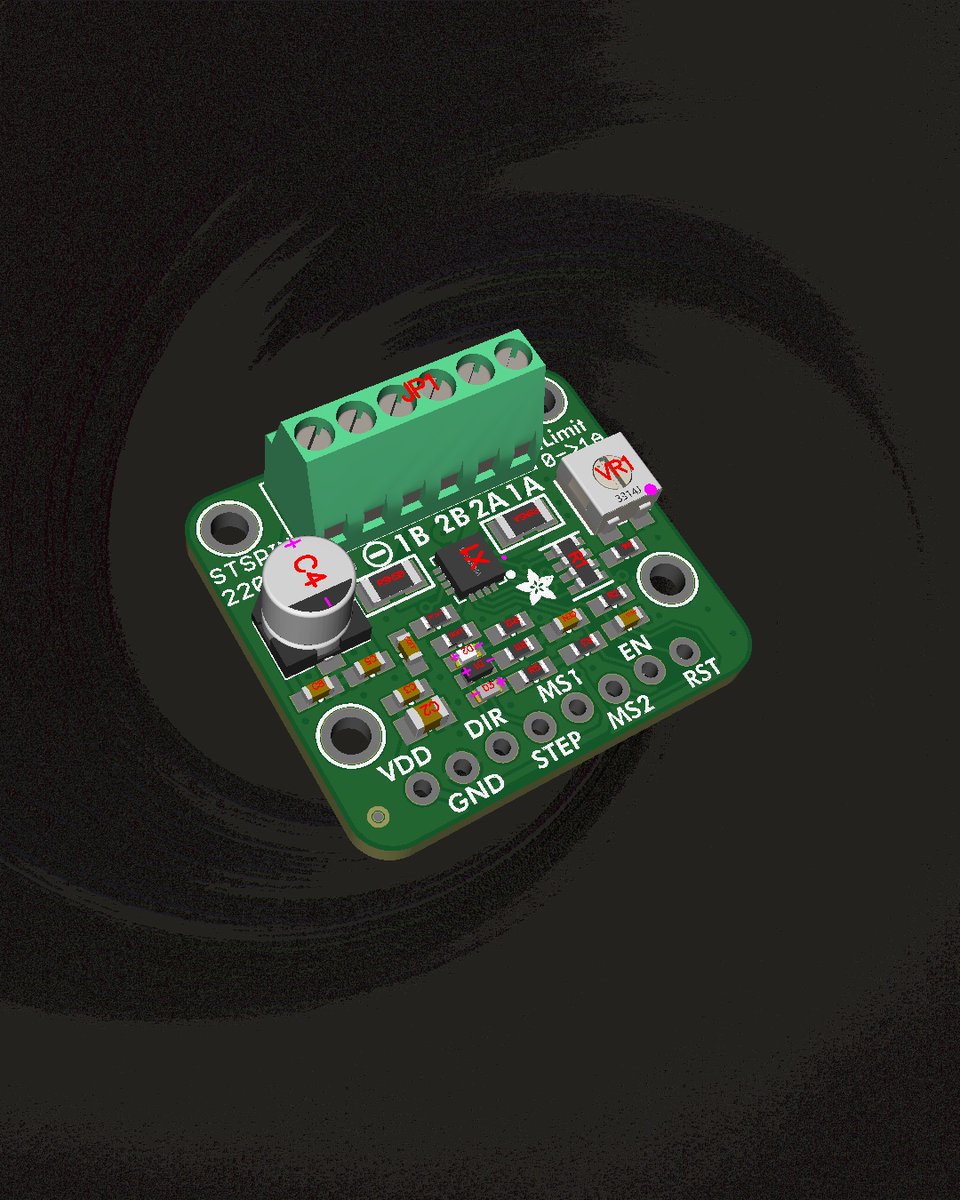
ALT A small green STSPIN220 motor driver board with labeled pins, components, and terminal blocks for stepper motor control.
8
1,848

24 Apr 2025
Never understand why people just hold back at the wall. You gotta start microstepping away from the wall so you can backdash
5
4
5,739

21 Apr 2025
Looking to achieve precision and smoother motion in your everyday applications?
Microstepping enhances stepper motor performance across varies applications helping enable smoother, more precise motion.
See how: ow.ly/Yz0850VEKNo
2
13
976

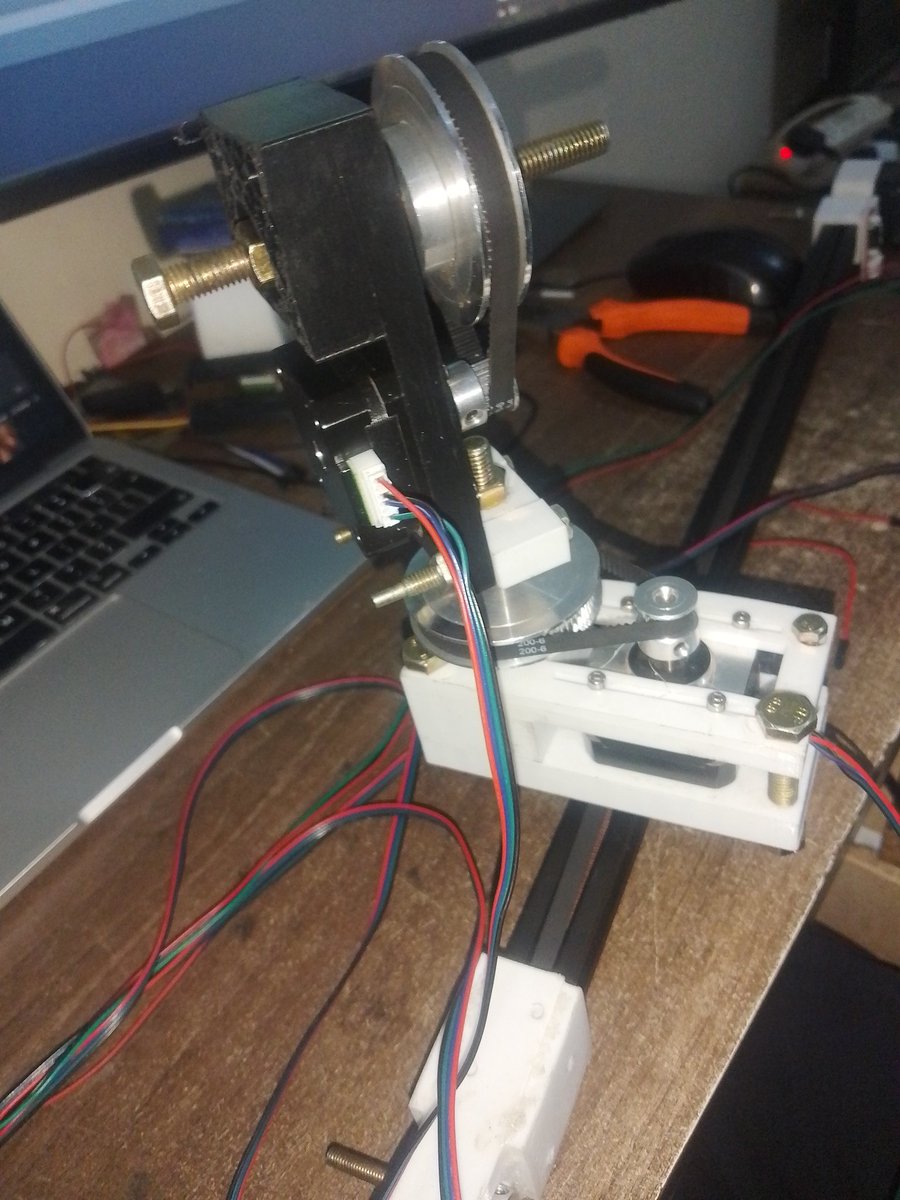
I picked up a Logitech Extreme 3D Pro joystick from FB Marketplace a couple days ago to control the robot arm. My goal is to create a comprehensive web interface with both button controls and joystick integration.
So far, I've implemented a working web-based control system for the single axis I currently have operational. The system consists of three main components: an Arduino sketch running the stepper motor, a Node.js server handling communication, and an HTML/JavaScript frontend.
The Arduino code manages precise stepper motor control with the AccelStepper library. It includes homing with an endstop sensor, smooth acceleration/deceleration, and positional constraints to prevent mechanical damage. The system tracks position in steps and converts to degrees, with a 300° maximum travel range. Eventually I'll start reprogramming my brain (and code) to think in radians instead of degrees.
My Node.js server bridges communication between the browser and Arduino using WebSockets and Serial connections. It relays commands like 'reset', 'jogcw', and 'jogccw' to the Arduino and broadcasts position updates back to all connected clients.
The browser interface displays the current position in degrees and provides buttons for homing the system and jogging in either direction. I've also added joystick readouts that display all axes and button states from the controller.
While I haven't yet connected the joystick control to the actual motor movement, the groundwork is there. I'll need to resolve some issues with how the joystick values are interpreted before fully integrating it into the control system.
Next steps will be adding speed control based on joystick position and extending the system to handle multiple axes as I complete the mechanical build of the remaining robot arm joints.
Evidently these cheap A4988 stepper drivers come out of the box with Vrefs all over the place, so I learned how to adjust that today. I've increased the Vref to 0.96V according to Vref = Motor Current x 8 x Sensing Resistance. I'm only using 60% of rated current, so I feel safe here and the extra torque is noticeable!
I also experimented some with microstepping today and landed on 1/8 step resolution, which is enough precision and still feels like enough torque. Turns out A4988 drivers are not only loud during operation, but also when they stop on a partial step and hold that position. Because of this annoying high pitched noise, I ordered some TMC2208 stepper drivers to replace them. Shout out to Grok for this suggestion.

3
156

17 Mar 2025
I see, Better to use heat sink for sustained use.
And choose one with enough ampere(current) rating for your usecase.
This one only has 1/16 microstepping if I recall correctly.
One I had , had 1/256
3
38
9 Mar 2025
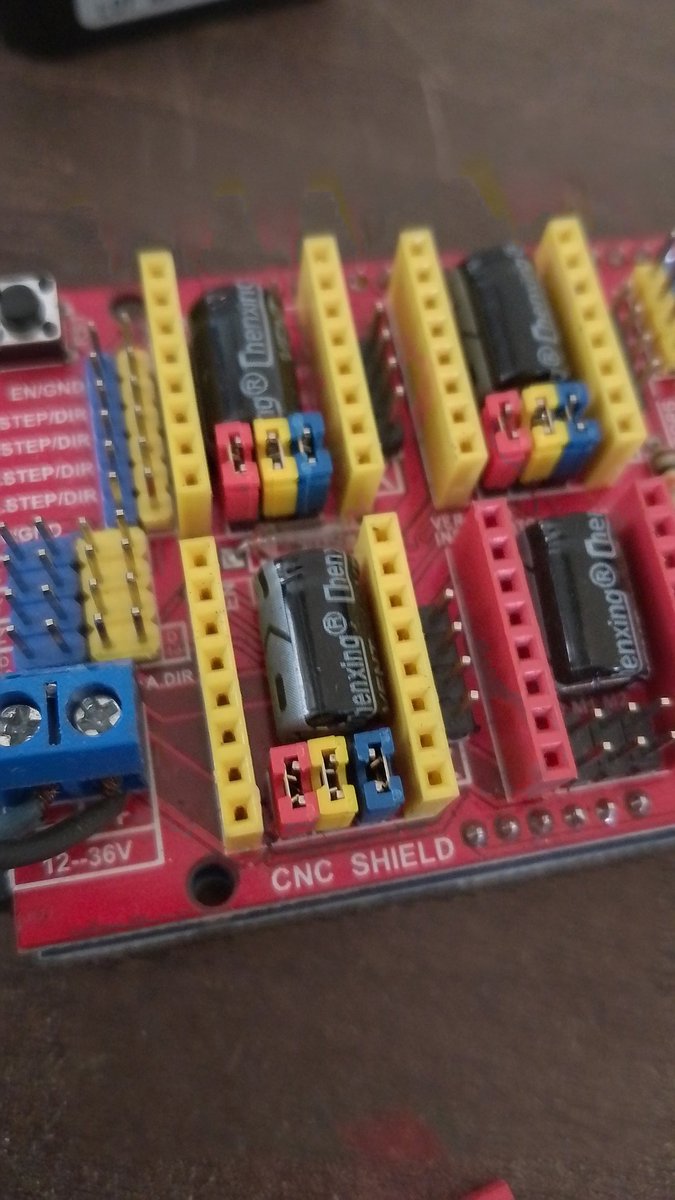
Activated 1/16 microstepping on my CNC board—now enjoying smoother motion and reduced noise. Small tweak, big impact.

4
13
632

7 Mar 2025
Для этого пришлось перенастроить плату усилителей, отключить дробный шаг (microstepping), поменять трансформатор питания шпинделя на здоровенный тороид 2х24 В (подключено как 1х48 В). И подключить по LPT к отдельному компу с LinuxCNC.
1
21
5 Mar 2025
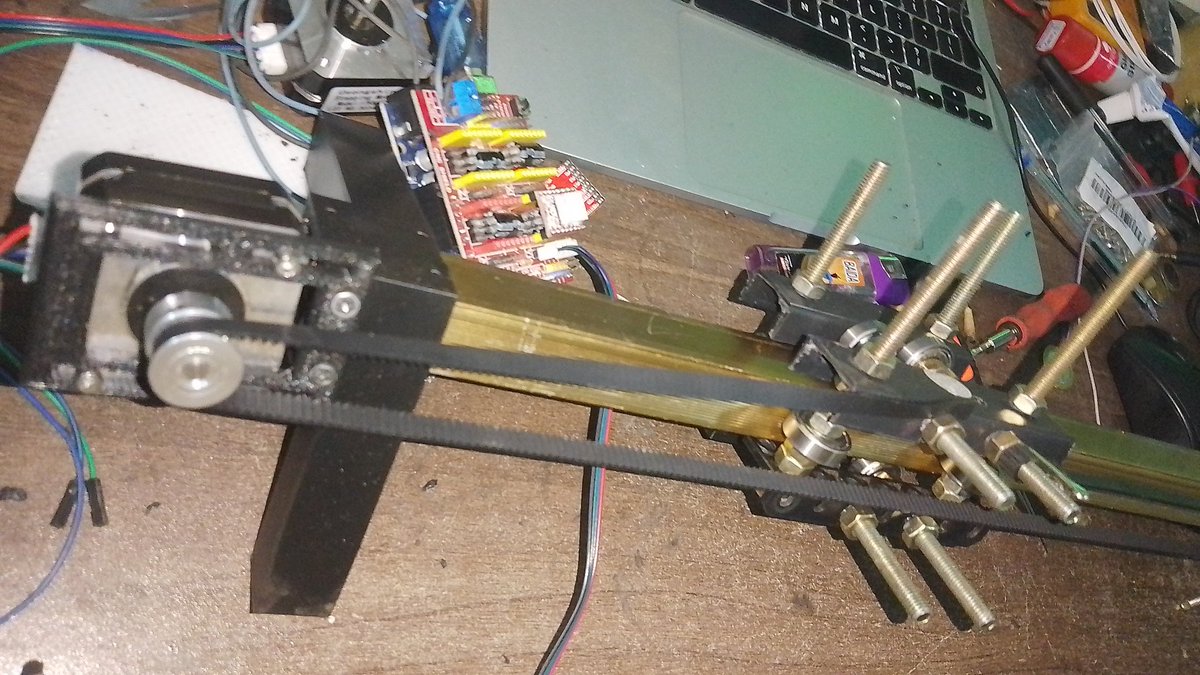
Second iteration on the linear slider, rig now rock solid. Vibrations are a problem but let me try microstepping the stepper motor, and rubber dumpers.

2
5
153
5 Mar 2025
Switching to microstepping, smother motion and quieter operation
1
2
59

5 Feb 2025
Mastering Precision: Understanding #Microstepping in #MotionControl #robotics #industrial embedded.com/mastering-preci…

1
1
102

3 Feb 2025
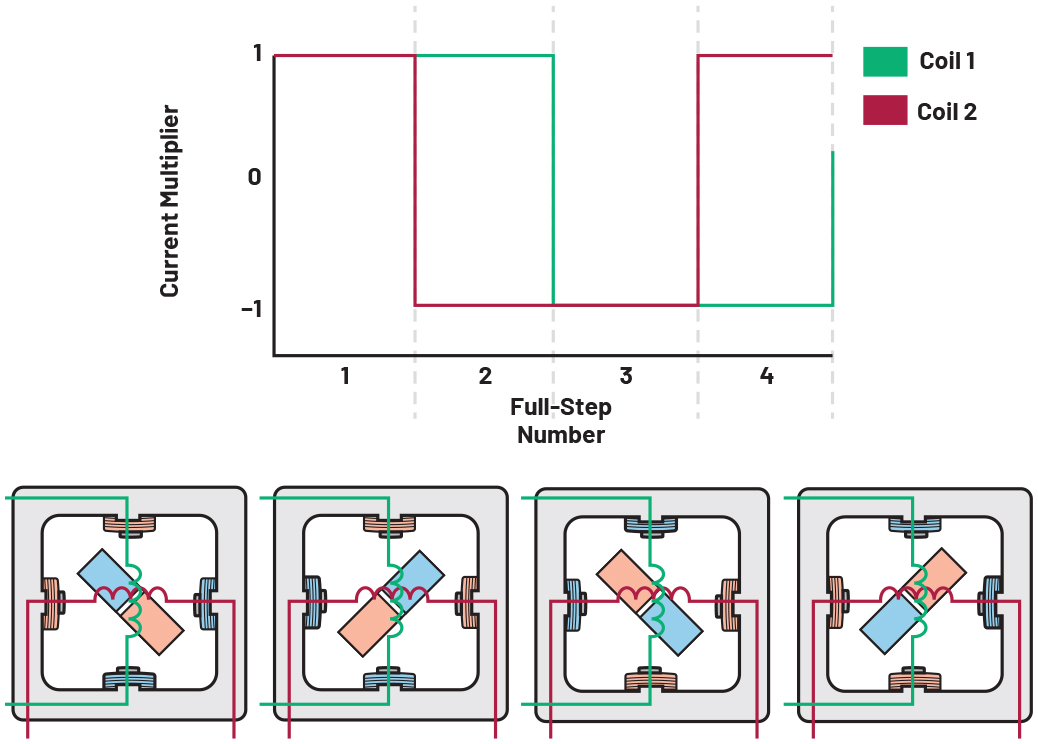
Stepper Motor Operating Principle and Microstepping Explained:
The [Denki Otaku] YouTube channel took a look recently at some stepper motors, or ‘stepping motors’ as they’re called in Japanese. Using a 2-phase stepper motor as an example, the stepper m… ift.tt/tB71Ncz
1
4
215

Stepper Motor Operating Principle and Microstepping Explained
hackaday.com/2025/02/03/step…
1
14
52
5,223