Chao Liu retweeted

Jun 11
GRASP's Modlab is developing a steerable needle that can be steered both manually and autonomously, injecting medication directly into the affected tissue. See the link below for more info!
modlabupenn.org/steerable-ta…
#GRASP #GRASPLab #Modlab #SteerableNeedle
1
290

Jun 12
* CG - News and Updates *
ModLab
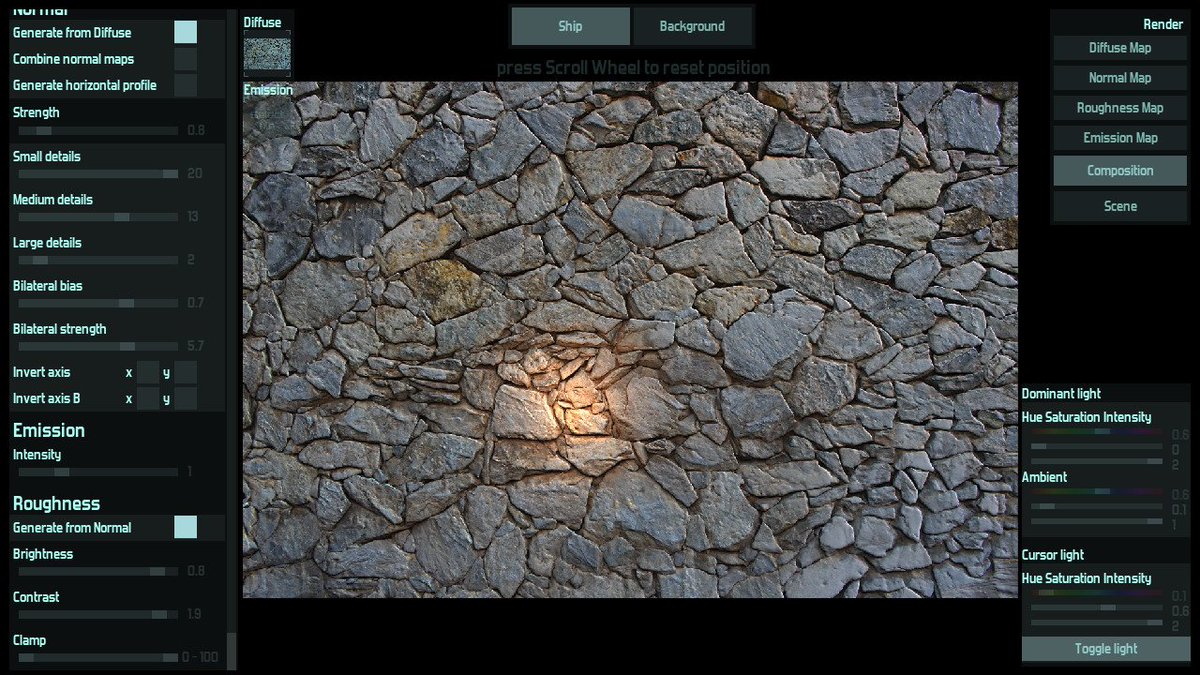
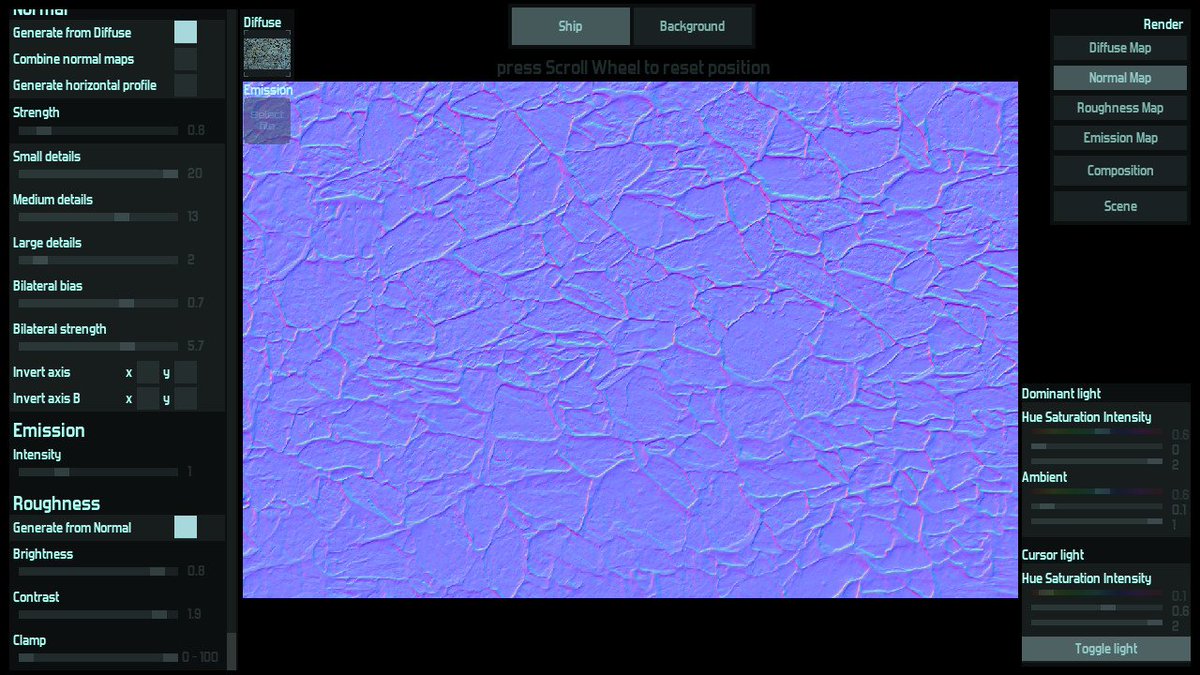
store.steampowered.com/app/7…
Info:
free tool that can generate and fine tune normal maps in a realtime rendering environment.
10

賓州大學研發ModQuad模組化四旋翼無人機 可空中自主對接組裝
美國賓夕法尼亞大學GRASP實驗室最新研發「ModQuad」模組化空中機器人系統,實現無人機空中自主對接與重組。這項技術讓多架小型四旋翼無人機在飛行中利用立方體框架上的磁鐵或機械連接器,精準對接形成線形、十字形等更大結構,共享控制、穩定性與推力,宛如單一大型飛行器般協同作業。
每個ModQuad模組以輕量Crazyflie四旋翼為核心,外覆立方框架,可在三維空間中快速對齊並連接,無需降落或外部輔助。研究人員透過分散式姿態控制器,確保組裝後結構穩定飛行,有效克服大型結構慣性增加的挑戰。
此技術源自GRASP實驗室ModLab與Kumar、Yim教授團隊多年研究,曾於ICRA等國際會議發表。未來應用潛力龐大,包括搜救任務中快速組建平台、物流運輸動態調整載具形狀,或基礎設施巡檢等動態環境。專家認為,這是可重構空中機器人領域的重要突破,有望推動無人機群從單一作業走向靈活自組態的「變形」新時代。
Jun 9

University of Pennsylvania researchers created ModQuad—quadrotors that dock mid-air and self-assemble into larger flying structures, then fly together as one, sharing control and stability.
409

Jun 3
ModLab can still produce some okayish results (asset not mine, just sorting something out)
2
3
101
7,447

May 22
法線マップを1発で作成!!無料で使えるノーマルマップエディタ「ModLab」!! (17位 / CG GEEKS 2018年 ベスト30) cg-geeks.com/?p=19394


5
19
3,107
Mar 20
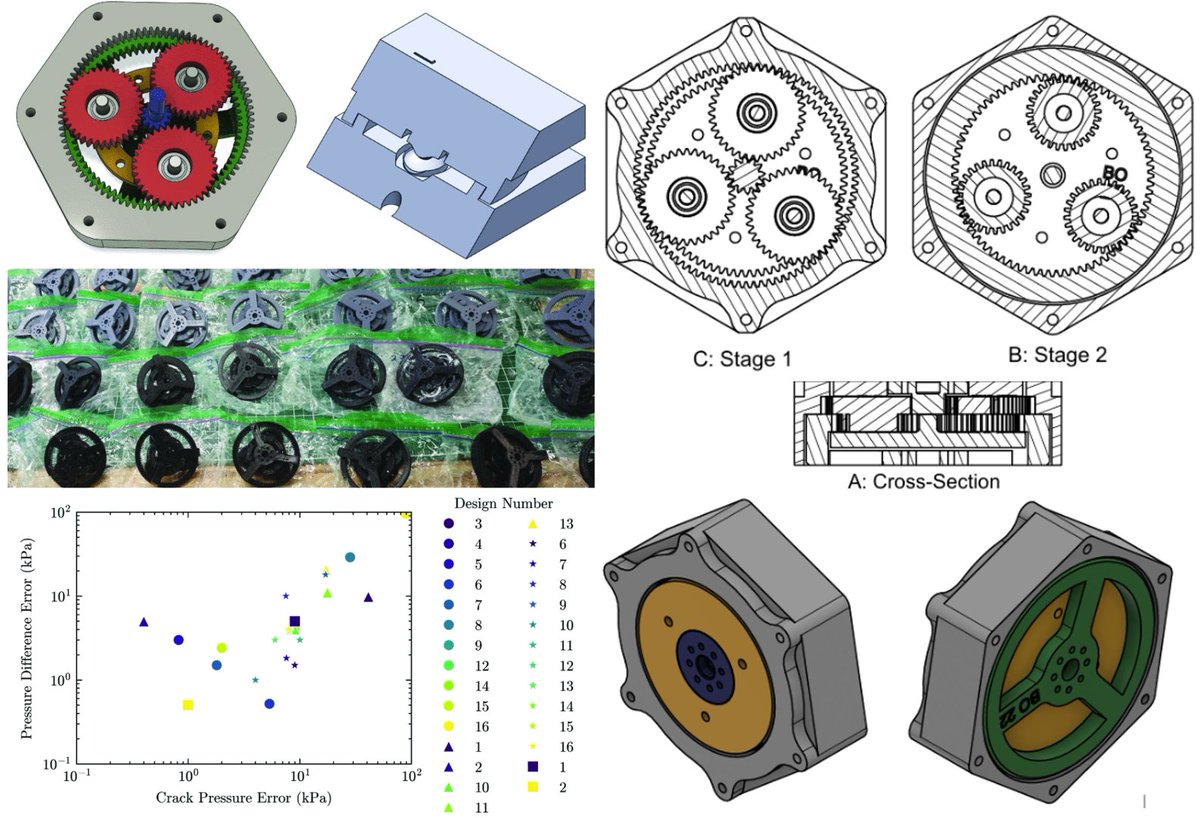
Check out the this article written by Yi Cao, a Master's student in MEAM and researcher with Modlab run by Dr. Mark Yim.
grasp.upenn.edu/news/co-opti…
#GRASP #GRASPLab #GRASPArticle
1
5
450
Feb 10
法線マップを1発で作成!!無料で使えるノーマルマップエディタ「ModLab」!! (17位 / CG GEEKS 2018年 ベスト30) cg-geeks.com/?p=19394
25
209
12,905

28 Dec 2025
ModQuad의 공중 합체 드론 영상이 2018년도 자료임에도 다시 회자되는 이유는 기술 자체보다 로봇을 무엇으로 정의할것인가라는 질문으로 귀결되기 때문이다.
이 질문에 대한 답은 하드웨어 성능이 아니라, 어떤 프레임으로 해석하느냐에 달려 있다.
@openmind_agi @xmaquina 본다면 로봇은 완성된 제품이 아니라, 필요에 따라 호출되고 해체되는 인프라가 된다.
openmind_agi의 관점에서 ModQuad는 로봇 지능이 고정된 몸을 가져야 한다는 전제를 무너뜨린다.
기존 로봇은 무게와 구조가 정해져있고, 지능은 그 조건안에서 움직임을 계산한다.
반면 ModQuad는 드론이 합체하거나 분리될때마다 무게 중심과 균형, 비행 특성이 달라진다.
같은 지능이라도 매 순간 전혀 다른 몸을 다루게 되는 셈이다.
이 환경에서 지능은 미리 정해진 동작을 반복하는 존재가 아니라,
지금 어떤 구조가 만들어졌는지를 먼저 이해하고,
그에 맞는 제어 방식을 새로 만들어야 한다. 더 중요한점은 목표가 주어졌을때 지능이 가장 먼저 하는 일이
어떻게 움직일까가 아니라 어떤 몸이 필요할까를 판단한다는 것이다.
지능이 행동 이전에 신체를 설계하는 단계로 이동한것이다.
xmaquina의 관점에서 ModQuad는 로봇을 하나의 완성품이 아니라, 필요할때만 합쳐지는 자산의 묶음으로 본다.
각 드론은 따로 소유될 수 있는 자산이며, 특정 작업이 있을때만 일시적으로 결합된다.
이 결합은 소유권을 넘기는것이 아니라, 일정 시간 동안 함께 일하는 상태에 가깝다.
그 시간동안 각 드론이 얼마나 역할을 분담했는지, 얼마나 에너지를 썼는지가 기록되고 작업이 끝나면 바로 정산된다.
여기서 중요한것은 위험도 함께 움직인다는 점인데, 여러 드론이 연결된 상태는 단독으로 날때보다 고장 위험이 크다.
xmaquina는 이 결합 상태 자체를 하나의 위험 조건으로 보고, 그 기간에만 비용과 보험 구조를 적용할 수 있을것이다.
물리적으로 연결된 상태가 곧바로 경제적 책임으로 어이지는 구조다.
이 두 관점이 결합되면 로봇은 고정된 역할을 수행하는 제품이 아니라,
평소에는 흩어진 작은 유닛으로 작동하다가, 큰 작업이 필요해지는 순간 openmind_agi가 적절히 드론들을 모으고 xmaquina는 그 결합상태를 하나의 자산 운용 단위로 관리할 수 있다.
ModQuad는 로봇은 지능과 로봇이 동시에 호출해 쓰는 물리적 실행 수단이 될 수 있음을 보여준다.
영상 출처: Modlab UPenn 유튜브

无心插柳,没想到写成 @openmind_agi 的榜一大哥了
正好期末也结束了,准备深入研究下机器人这个权威的赛道
个人认为机器人这个方向或许是 Web3 罕见的有明确需求、有技术门槛、同时拥有结构性增长的赛道
后续我会持续研究这个方向,从叙事、机制、产品、积分、激励、生态五个维度切入
最后想问大家:你理想中的 Web3 机器人,应该是个什么样子?

51
53
659
7 Dec 2025
法線マップを1発で作成!!無料で使えるノーマルマップエディタ「ModLab」!! (17位 / CG GEEKS 2018年 ベスト30) cg-geeks.com/?p=19394
34
372
26,840
1 Oct 2025
法線マップを1発で作成!!無料で使えるノーマルマップエディタ「ModLab」!! (17位 / CG GEEKS 2018年 ベスト30) cg-geeks.com/?p=19394
1
12
2,485
16 Sep 2025
法線マップを1発で作成!!無料で使えるノーマルマップエディタ「ModLab」!! (17位 / CG GEEKS 2018年 ベスト30) cg-geeks.com/?p=19394
24
3,177
8 Jun 2025
法線マップを1発で作成!!無料で使えるノーマルマップエディタ「ModLab」!! (17位 / CG GEEKS 2018年 ベスト30) cg-geeks.com/?p=19394
9
3,009
18 May 2025
法線マップを1発で作成!!無料で使えるノーマルマップエディタ「ModLab」!! (17位 / CG GEEKS 2018年 ベスト30) cg-geeks.com/?p=19394
17
2,606

12 Apr 2025
■ModLAB. / RC4558P MC Mod 808
実際にヴィンテージTSに触れてきたTRIALのビルダー高早氏が手掛ける究極のTS-808モディファイペダル。音を再現する為に半導体パーツは同ブランド同品番のオリジナルに交換し、選定したパーツを使用して仕上げた逸品。
#大日エフェクター便り
store.shimamura.co.jp/ec/pro…



2
504

2 Mar 2025
法線マップを1発で作成!!無料で使えるノーマルマップエディタ「ModLab」!! (17位 / CG GEEKS 2018年 ベスト30) cg-geeks.com/?p=19394
6
102
6,810

La Dra. Susanna Bodoy, i investigadora del grup de recerca Mechanisms of Disease Lab (MoDLab), lidera una recent publicació científica a la revista Molecular Medicine
👉bit.ly/3F72Hgk
2
66
30 Jan 2025
Congratulations to GRASP research groups Modlab and Sung Robotics and their UG researcher, Summer Cobb, for winning the 2025 Penn Y-Prize competition!
#PennYPrize #GRASP #GRASPLab
2
5
792
