
most beautiful.
epitrochoid, hypotrochoids, cycloids, animation.
Wolfram Language code.
math, geometry.
Clear[hypotrochoidAnimate]
hypotrochoidAnimate::usage = "
hypotrochoidAnimate[{a,b,h}]
generates a list of graphics that trace out a hypotrochoid by rolling \
a circle inside another.
a is the radius of the fixed circle.
b is the radius of the rolling circle.
a > b.
h is the distance from the tracing point to the center of the rolling \
circle.
hypotrochoidAnimate[{a,b,h}, {tMin, tMax}]
start at tMin, stop at tMax.
{tMin, tMax} control the number of rotations.
hypotrochoidAnimate[{a,b,h}, {tMin, tMax, tStep}]
using tStep.
hypotrochoidAnimate[ {1, 1/4, 1/4}, {0, 2 Pi, 2 Pi/10} ]
If not specified, an internal algorithm will figure out the number of \
rotations so that the curve is closed.
tStep control the number of frames indirectly.
0 <= tMin <= tMax < Infinity.
Options:
NumberOfFrames-> Automatic
LastFrameOnly -> False
example:
ListAnimate @ hypotrochoidAnimate[ {1, 1/4, 1/4} ]
ListAnimate @ hypotrochoidAnimate[ {1, 1/4, 1/4}, {0, Pi, 0.2 } ]
hypotrochoidAnimate[ {1, 1/4, 1/4}, LastFrameOnly -> True ]
hypotrochoidAnimate[ {1, 1/4, 1/4}, {0, Pi}, LastFrameOnly -> True ]
ListAnimate @ hypotrochoidAnimate[ {1, 3/4, 3/4}, NumberOfFrames -> \
100 ]
hypotrochoidAnimate[ {1, 2/5, 1}, LastFrameOnly -> True, \
NumberOfFrames -> Automatic]
hypotrochoidAnimate[ {1, 1/3, 1/3}, LastFrameOnly -> True, \
NumberOfFrames -> 120]
Created: 2026-03-01
Version: 2026-03-01
";
Options[hypotrochoidAnimate] =
Join[{NumberOfFrames -> Automatic, LastFrameOnly -> False},
Options[Graphics]];
hypotrochoidAnimate[{a_, b_, h_}, tRange_List : Automatic,
opts : OptionsPattern[]] :=
Block[{nOfFrames, tMin, tMax, tStep, xmargin, tRangeList,
tracingPointF, pointListGP, staticGP, movingGP,
lastFrameGP},(*todo.set the number of frames such that the tracing \
point traveled after tStep is constant like 0.3*)
nOfFrames =
If[OptionValue@NumberOfFrames === Automatic,
Min[400, ((Numerator@Rationalize[b/a, 0]) (15*4))],
OptionValue@NumberOfFrames];
{tMin, tMax, tStep} =
Which[tRange === Automatic, {0,
N@Numerator@Rationalize[N@b/a, 0] 2 Pi,
N@(tMax - tMin)/(nOfFrames - 1)}, Length@tRange === 3, N@tRange,
True, N@{First@tRange,
Last@tRange, (tMax - tMin)/(nOfFrames - 1)}];
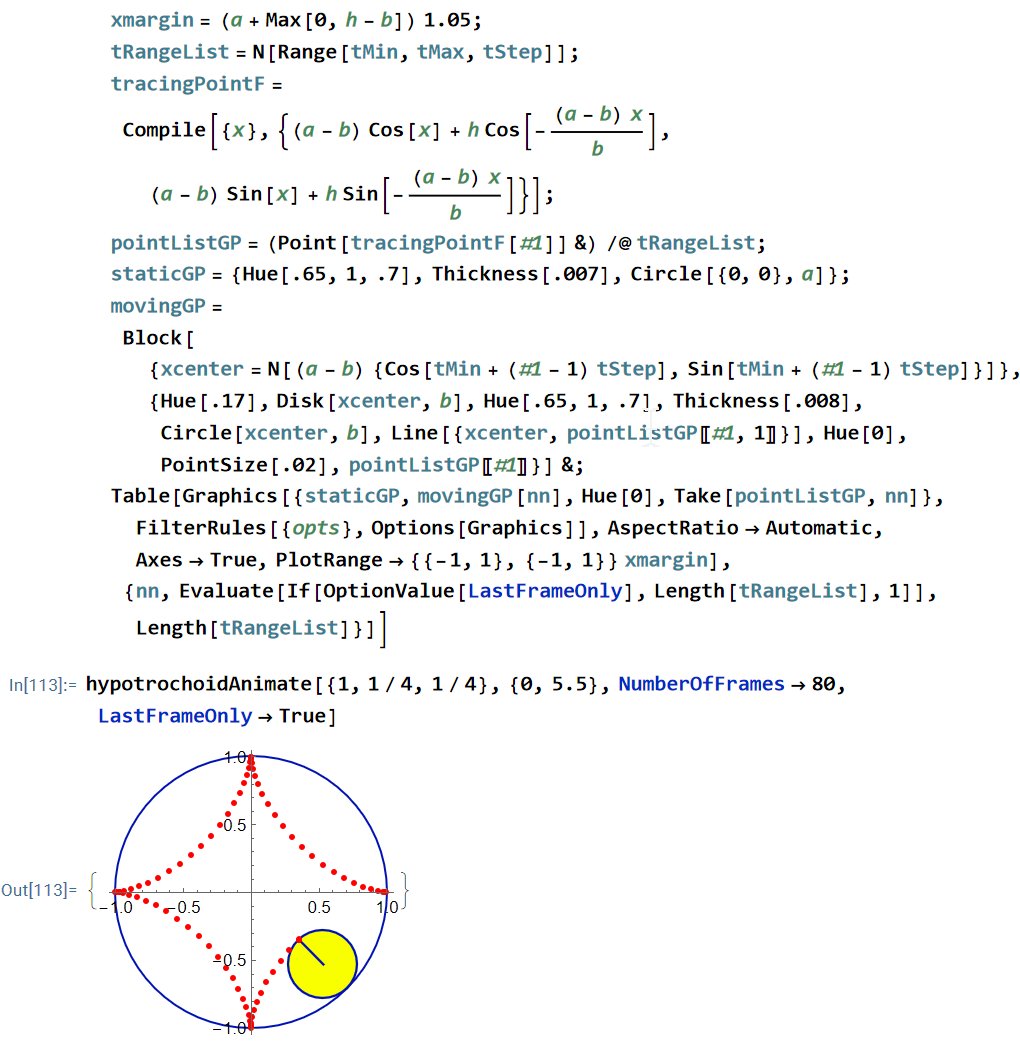
xmargin = (a Max[0, h - b]) 1.05;
tRangeList = N@Range[tMin, tMax, tStep];
tracingPointF =
Compile[{x}, {(a - b) Cos[x]
h Cos[-(a - b)/b x], (a - b) Sin[x] h Sin[-(a - b)/b x]}];
pointListGP = Map[Function[Point@tracingPointF@#], tRangeList];
staticGP = {Hue[.65, 1, .7], Thickness[.007], Circle[{0, 0}, a]};
movingGP =
Function[
Block[{xcenter = (a - b) {Cos[tMin (# - 1) tStep],
Sin[tMin (# - 1) tStep]} // N}, {Hue[.17],
Disk[xcenter, b], Hue[.65, 1, .7], Thickness[.008],
Circle[xcenter, b], Line[{xcenter, pointListGP[[#, 1]]}],
Hue[0], PointSize[.02], pointListGP[[#]]}]];
Table[Graphics[{staticGP, movingGP@nn, Hue[0],
Take[pointListGP, nn]}, FilterRules[{opts}, Options[Graphics]],
AspectRatio -> Automatic, Axes -> True,
PlotRange -> ({{-1, 1}, {-1, 1}} xmargin)], {nn,
Evaluate@If[OptionValue@LastFrameOnly, Length@tRangeList, 1],
Length@tRangeList}]]
(*s------------------------------*)
ListAnimate@hypotrochoidAnimate[{1, 1/4, 1/4}]
ListAnimate@hypotrochoidAnimate[{1, 1/4, 1/4}, {0, Pi, 0.2}]
hypotrochoidAnimate[{1, 1/4, 1/4}, LastFrameOnly -> True]
hypotrochoidAnimate[{1, 1/4, 1/4}, {0, Pi}, LastFrameOnly -> True]
ListAnimate@hypotrochoidAnimate[{1, 3/4, 3/4}, NumberOfFrames -> 100]
hypotrochoidAnimate[{1, 2/5, 1}, LastFrameOnly -> True,
NumberOfFrames -> Automatic]
hypotrochoidAnimate[{1, 1/3, 1/3}, LastFrameOnly -> True,
NumberOfFrames -> 120]
1
3
23
1,620

12 Sep 2025
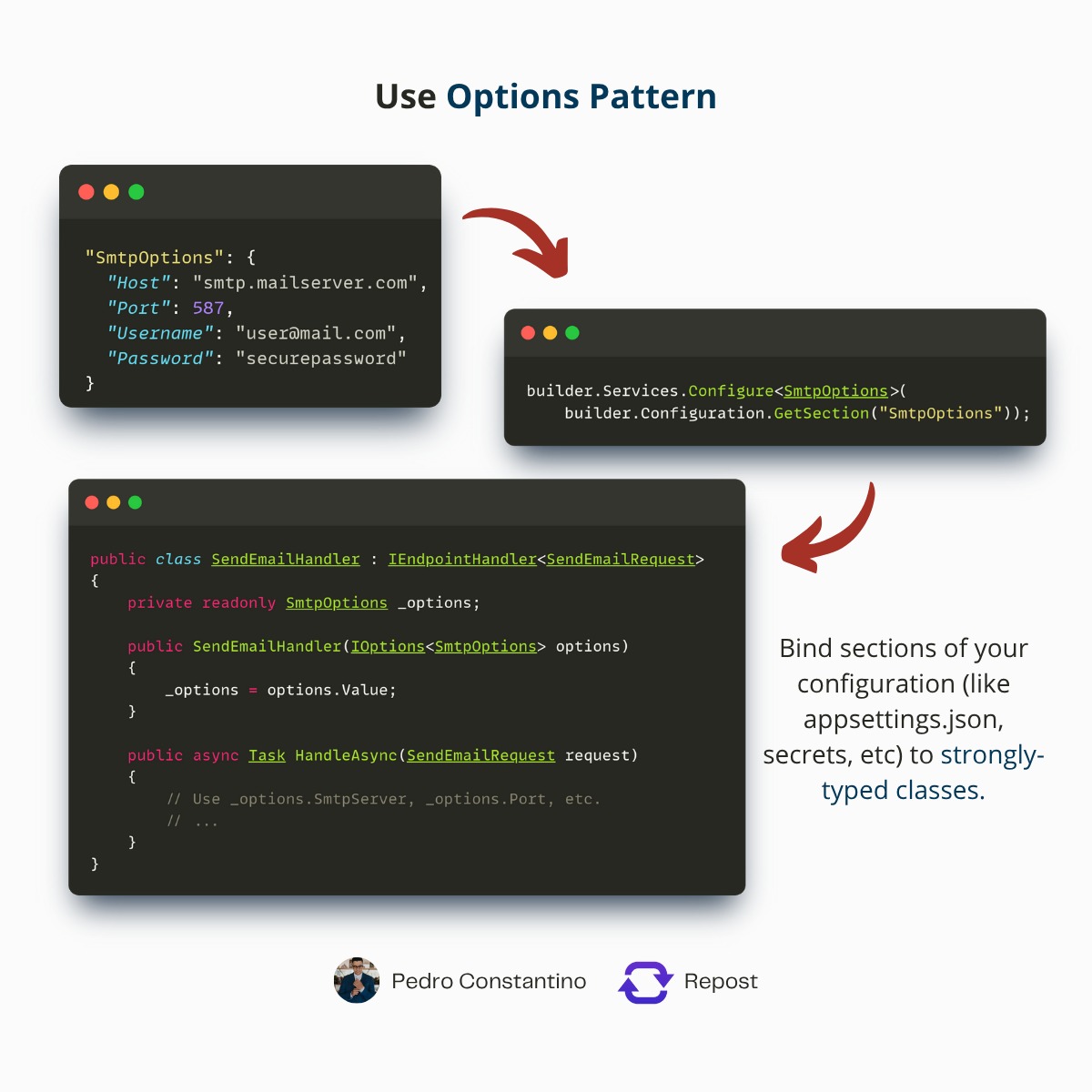
🔵 𝐔𝐬𝐞 𝐎𝐩𝐭𝐢𝐨𝐧𝐬 𝐏𝐚𝐭𝐭𝐞𝐫𝐧
Still accessing config values with Configuration["Section:Key"] everywhere? That’s a maintenance nightmare waiting to happen.
📌 The Options Pattern in .NET is a design approach that allows you to bind sections of your configuration (like appsettings.json, secrets, etc) to strongly-typed classes. Instead of reading raw values from IConfiguration directly throughout your code, you encapsulate configuration data into well-defined objects that can be injected via dependency injection.
✅ Use services.Configure<T>() and inject IOptions<T> to make your configuration reliable and structured.
💬 Are you still reading settings as raw strings?
❤️ Like if you prefer clean, type-safe config!
🔁 Share to help others stop the hardcoding madness!
#DotNet #CSharp #OptionsPattern #CleanCode #CodingTips #SoftwareDevelopment
1
3
27
18 Jul 2025
🔵 𝟖 𝐛𝐥𝐨𝐠𝐬 𝐭𝐡𝐚𝐭 𝐢𝐦𝐩𝐫𝐨𝐯𝐞𝐝 𝐦𝐲 .𝐍𝐄𝐓 𝐜𝐨𝐝𝐞 — 𝐟𝐨𝐫 𝐫𝐞𝐚𝐥
If you're a backend or full-stack dev working with .NET, these articles were written with you in mind.
Over the past few months, I’ve shared 8 blog posts packed with lessons from real-world projects, each one packed with clean code tips, architectural insights, and code samples that you can use right away.
1 - How to Generate Fake Data for Automated Tests Using Bogus
(pedrocons.com/how-to-generat…)
2 - Central Package Management in .NET: A Must-Have for Scalable Projects
(pedrocons.com/central-packag…)
3 - What Is Vertical Slice Architecture and Why Should You Care?
(pedrocons.com/what-is-vertic…)
4 - Global Exception Handling in .NET – Why You Can’t Ignore It
(pedrocons.com/global-excepti…)
5 - Why Most Developers Get Minimal API Structure Wrong (And How to Fix It)
(pedrocons.com/why-most-devel…)
6 - Why .NET Developers Are Saying Goodbye to Controllers and Embracing Minimal APIs – And You Should Too
(pedrocons.com/why-net-develo…)
7 - What Is the Options Pattern in .NET and Why Should You Use It?
(pedrocons.com/what-is-the-op…)
8 - How to Boost Your .NET Apps with Fluent Validation (Step-by-Step Tutorial)
(pedrocons.com/how-to-boost-y…)
No fluff. Just sharp solutions to common problems.
💬 Which topic should I dive deeper into with code walkthroughs?
❤️ Like if one of these saved you some time
🔁 Repost to help others write better .NET apps
#DotNet #CSharp #CleanCode #MinimalApi #AspNetCore #Testing #Architecture #VerticalSlice #FluentValidation #OptionsPattern #SoftwareEngineering
1
2
6
765

2 Sep 2024
📢 I'm thrilled to announce the launch of my first ever @dometrain course—From Zero to Hero: Configuration and Options in .NET. This is fundamental to all #dotnet apps and covers everything you need to know. 🤓
#configuration #optionspattern #csharp
dometrain.com/course/from-ze…
19
58
8,692

30 Apr 2023
🔥How do you load configurations from appsettings.json in your #aspnetcore applications? Here is the #optionspattern for you.
Follow this thread along to learn more.
#dotnet #developer #backend #webapi #settings
5
32
155
14,969

12 Nov 2021
Our AppSec Engineer, @dkotik, will be presenting Why the Options Pattern is Great for Security tomorrow. Be sure to register: hubs.ly/H0_5HBk0
#SecurityJourney #OptionsPattern #AppSec #0xcon #Discord #YouTube
1
14 Oct 2021
Have you marked your calendars for the @SecSeaConf to join in on @dkotik's presentation, "Why the Options Pattern is Great for Security"? Here's your last chance to reserve your spot!
hubs.ly/H0XpkKg0
#OptionsPattern #SecureCode #AppSec #CyberSecurity #Cyber
1
30 Aug 2021
Our very own Application Security Engineer, @dkotik, will present "Why the Options Pattern is Great for Security" at @NoNameConOrg!
Be sure to join the presentation on September 3rd at 12pm UTC: hubs.ly/H0WdFQt0
#SecurityJourney #NoNameCon #OptionsPattern
2
2
20 Aug 2021
Check out Security Journey's Application Security Engineer @dkotik's presentation "Why the Options Pattern is Great for Security" @owasp: hubs.ly/H0TqX5_0
#SecurityJourney #OptionsPattern #CyberSecurity #Tech #OWASP
1
2

3 Sep 2020
In our new article, we’re going to cover another way of reading configuration data in #aspnetcore – the Options Pattern. It helps us group related configuration settings, and it provides strongly typed access to them: code-maze.com/aspnet-configu…
#configuration #optionspattern
5

Yeah, OptionsPattern[] is the only sane way to do things. I wish more languages had keyword args like python. At the same time I also wish more langs had pattern-matching like Haskell and Mma
3

21 Nov 2017
Can you answer this? About the OptionsPattern[] approach of inheriting Options mathematica.stackexchange.co… #mathematica
1