
10 Jun 2025
హైదరాబాద్ పత్రం: భారతదేశంలో మొదటి AI డాక్ మోడల్ ఆవిష్కరణ!
#HyderabadAI #Patram #IndiaAI #AIDocModel #TechInnovation #VisionLanguageAI #HyderabadTech #FutureIsAI #DigitalIndia #MakeInIndiaAI #DocumentUnderstanding #AIRevolution #IndianTech #InnovationHub #Hyderabad #India
1
2
17

Introducing Hi Robot, the next step in AI-driven robotics!
@physical_int @CryptoEternalAI @punk3700
#HiRobot #AI #Robotics #VisionLanguageAI #MachineLearning #AIInnovation #FutureOfAI #IntelligentAutomation #TechBreakthrough #NextGenRobots
26 Feb 2025

Vision-language models can control robots, but what if the prompt is too complex for the robot to follow directly?
We developed a way to get robots to “think through” complex instructions, feedback, and interjections. We call it the Hierarchical Interactive Robot (Hi Robot).
2
13
196

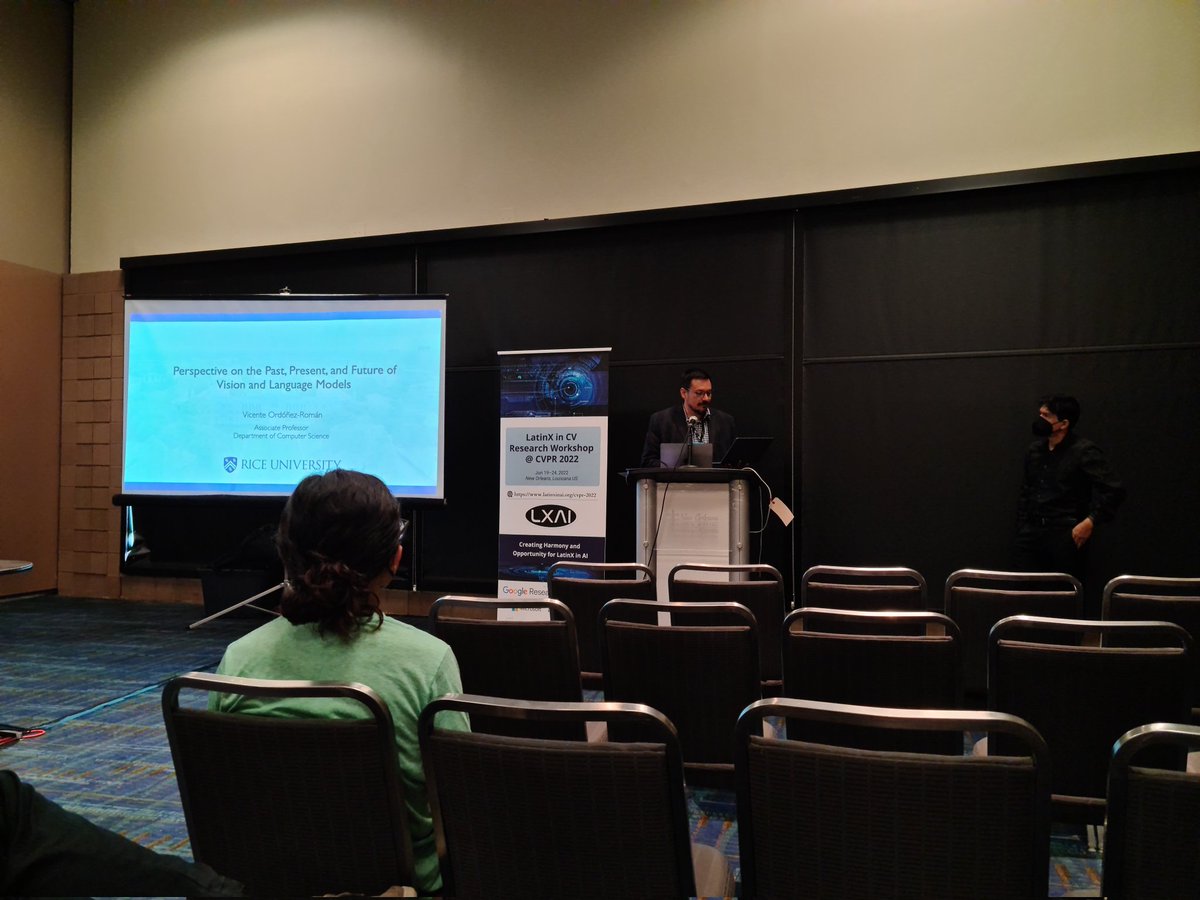
19 Jun 2022
Are you interested in #VisionLanguageAI #MultiModalAI?
We are waiting for you. Come to room 217, quick quick!
#AI #ComputerVision #NLP #CVPR2022 @CVPR
3
5
44