
Jun 13
Sティアの人達すぐClass0か1まで連れてってくれるし脱出経路案内してくれる
Jun 12

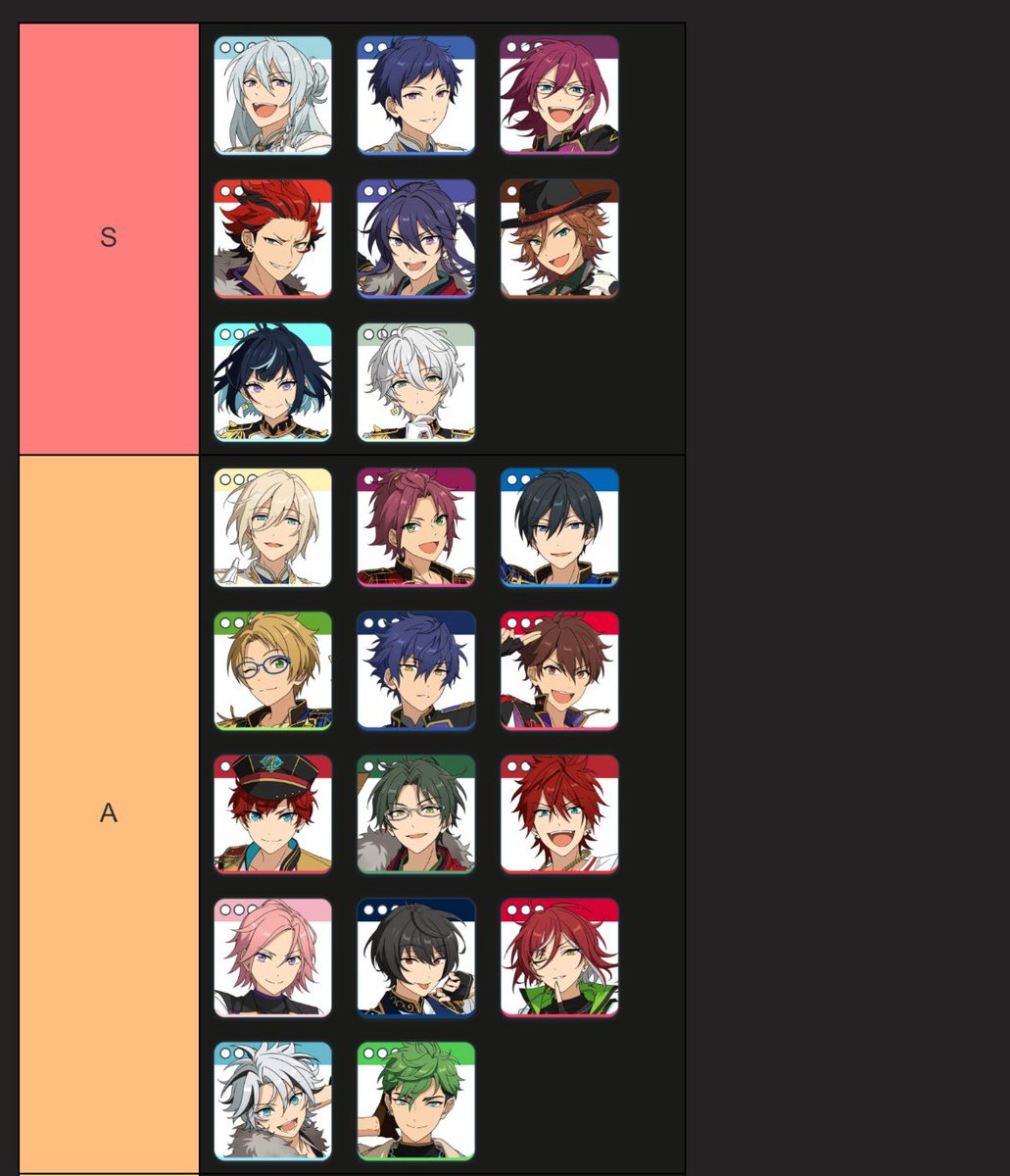
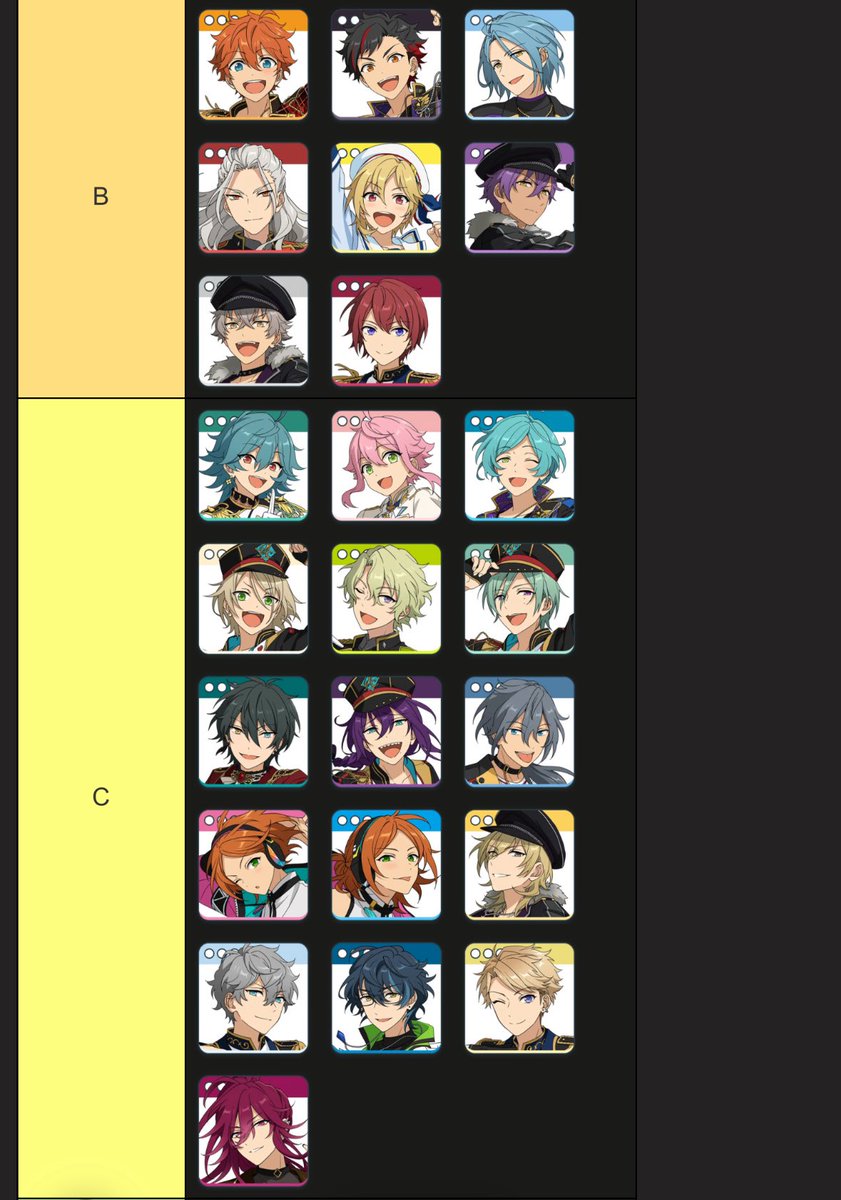
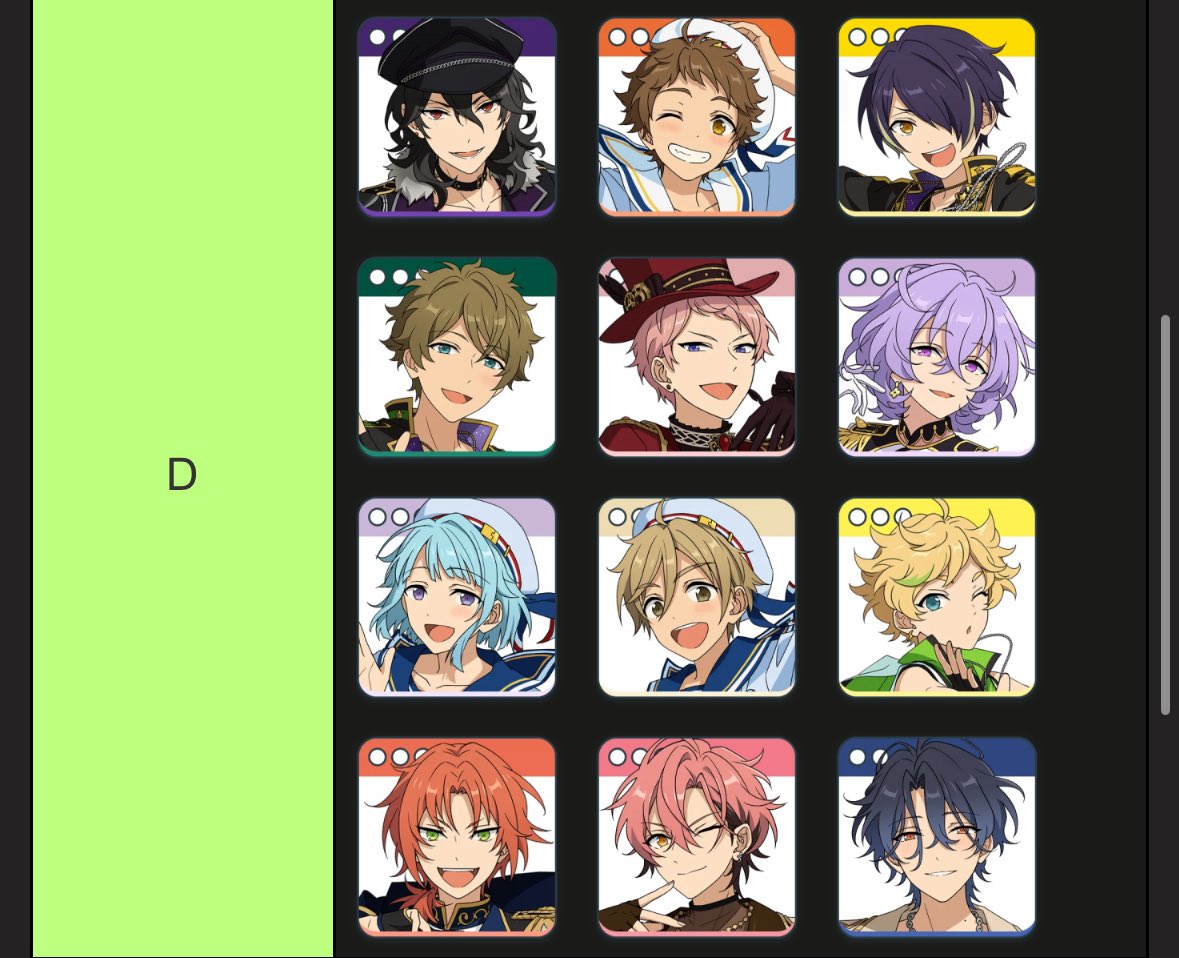
これまじで個人的なんだけど
バックルームっていう異空間に迷い込んだ時に頼りになる人(助かる確率高い)tier表
⚠️個人的意見含む⚠️
みんなの意見聞かせて
1
3
959

Feb 26
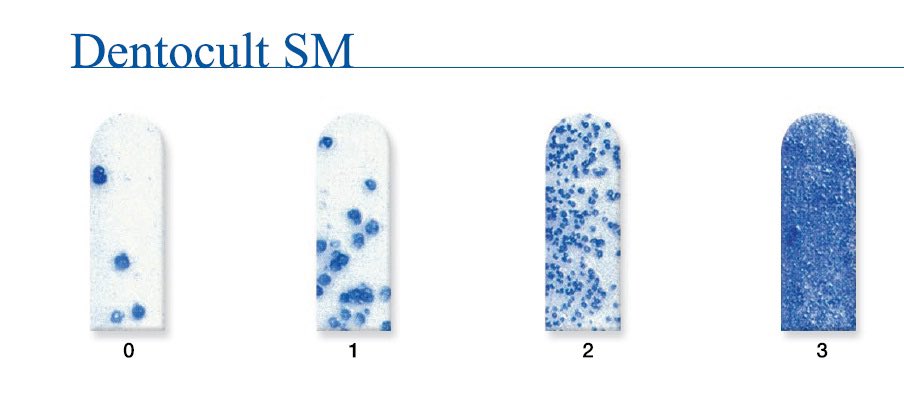
🌟Dentocult® SM
検体:唾液
評価項目:ミュータンスレンサ球菌数測定
特徴:1分間パラフィンを咀嚼させた後に唾液を採取し、高濃度のスクロースを含む培地で37℃で48時間培養する
判定:
Class0
Class1:<10⁵ CFU/mL
Class2:10⁵ ~ 10⁶ CFU/mL
Class3:>10⁶ CFU/mL

2
1
10
487
Feb 26
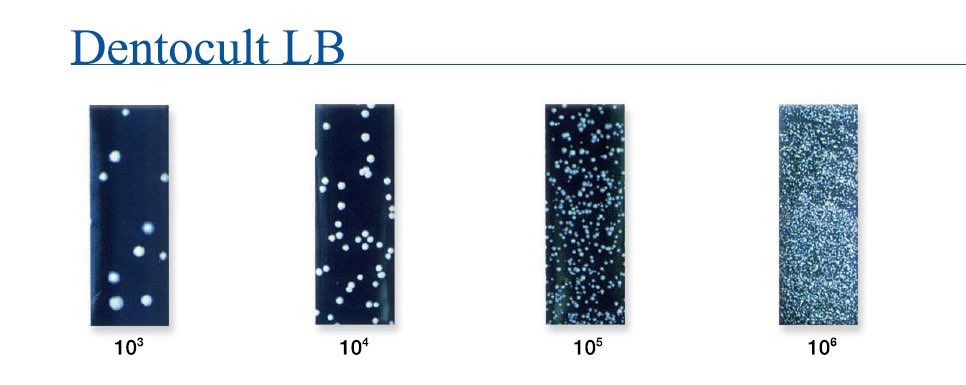
🌟Dentocult® LB
検体:唾液
評価項目:乳酸桿菌数測定
特徴:3分間パラフィンを咀嚼させた後に唾液を採取し、寒天スライド上で37℃で4日間培養する
判定:
Class3:10⁶以上CFU/mL
Class2:10⁵ CFU/mL
Class1:10⁴ CFU/mL
Class0:10³以下CFU/mL

1
9
395

Feb 22
#Kimsuky #DPRK🇰🇵
5512102[.]net
verify[.]supportnpdisp[.]mydns[.]bz
billmatedoc[.]mydns[.]bz
user[.]billmatedoc[.]mydns[.]bz
n-store[.]ips-nidlog[.]mydns[.]vc
n-corp[.]ips-nidlog[.]mydns[.]vc
nuser-login[.]ips-mailer[.]mydns[.]vc
n-store[.]ips-mailer[.]mydns[.]vc
navemainse[.]mydns[.]jp
lmdoc-hometax[.]mydns[.]bz
n-corp[.]ips-dns[.]mydns[.]vc
ips-dns[.]mydns[.]vc
nid-user[.]ips-nidlog[.]mydns[.]vc
n-cloud[.]ips-mailer[.]mydns[.]vc
docinf[.]nphostinvoice[.]mydns[.]bz
nfo[.]reviewusrblog[.]mydns[.]bz
info[.]nphostinvoice[.]mydns[.]bz
docinfp[.]reviewusrblog[.]mydns[.]bz
nfo[.]docauthzone[.]mydns[.]bz
ice[.]docauthzone[.]mydns[.]bz
58nts-govkr[.]mydns[.]vc
210[.]58nts-govkr[.]mydns[.]vc
247[.]210[.]58nts-govkr[.]mydns[.]vc
158[.]247[.]210[.]58nts-govkr[.]mydns[.]vc
teddy[.]jp
nwdocument-hometax[.]mydns[.]bz
invoice[.]docauthzone[.]mydns[.]bz
edoc[.]docauthzone[.]mydns[.]bz
docinfo[.]docauthzone[.]mydns[.]bz
docauthzone[.]mydns[.]bz
nid-user[.]ips-notice[.]mydns[.]bz
twins2000[.]net
usraccesstype[.]mydns[.]bz
usrauthsystem[.]mydns[.]bz
usr[.]usrauthsystem[.]mydns[.]bz
usr[.]usraccesstype[.]mydns[.]bz
invoice[.]usrauthsystem[.]mydns[.]bz
invoice[.]usraccesstype[.]mydns[.]bz
info[.]usrauthsystem[.]mydns[.]bz
edoc[.]usrauthsystem[.]mydns[.]bz
edoc[.]usraccesstype[.]mydns[.]bz
doc[.]usrauthsystem[.]mydns[.]bz
xyinc[.]biz
n-cloud[.]ips-dns[.]mydns[.]vc
tokyoanalysis[.]com
edoc[.]lnkblogaddress[.]mydns[.]bz
lnkblogaddress[.]mydns[.]bz
idas-g[.]com
ncv-clinic[.]com
n-corp[.]nts-ecorp[.]mydns[.]bz
bok[.]mydns[.]bz
store[.]bok[.]mydns[.]bz
nblog-auth[.]mydns[.]bz
ips-nidkr[.]mydns[.]bz
n-blog[.]nblog-auth[.]mydns[.]bz
nidocument-hometax[.]mydns[.]bz
doc[.]nps-usrcontent[.]mydns[.]bz
nps-usrcontent[.]mydns[.]bz
edoc[.]nps-usrcontent[.]mydns[.]bz
info[.]nps-usrcontent[.]mydns[.]bz
manageblogsvc[.]mydns[.]bz
userinfo[.]ntlinkprofile[.]mydns[.]bz
usr[.]manageblogsvc[.]mydns[.]bz
docinfo[.]manageblogsvc[.]mydns[.]bz
blog[.]manageblogsvc[.]mydns[.]bz
info[.]manageblogsvc[.]mydns[.]bz
untistar[.]com
mkdocument-hometax[.]mydns[.]bz
noticeips-nid[.]mydns[.]bz
mmdoc-hometax[.]mydns[.]bz
info[.]ntgokorea[.]mydns[.]bz
nid-user[.]ips-authcheck[.]mydns[.]bz
n-store[.]ips-authcheck[.]mydns[.]bz
n-corp[.]ips-authcheck[.]mydns[.]bz
ips-authcheck[.]mydns[.]bz
ntgokorea[.]mydns[.]bz
n-corp[.]ips-nidlg[.]mydns[.]bz
n-cloud[.]ips-nidlg[.]mydns[.]bz
ips-nidlg[.]mydns[.]bz
ips-dns[.]mydns[.]bz
invoice[.]blog-usrproof[.]mydns[.]bz
info[.]blog-usrproof[.]mydns[.]bz
docinfo[.]blog-usrproof[.]mydns[.]bz
ntercmdoc[.]mydns[.]bz
ips-nidecall[.]mydns[.]vc
mtdocument-hometax[.]mydns[.]bz
mtdoc-hometax[.]mydns[.]bz
dn[.]mtdoc-hometax[.]mydns[.]bz
info[.]ntercmdoc[.]mydns[.]bz
nuser-login[.]ips-nidecall[.]mydns[.]vc
nid-user[.]ips-nidecall[.]mydns[.]vc
n-store[.]ips-nidecall[.]mydns[.]vc
bn[.]mkdocs-hometax[.]mydns[.]bz
kasii[.]work
n-corp[.]ips-taxmail[.]mydns[.]bz
n-cloud[.]ips-taxmail[.]mydns[.]bz
ips-taxmail[.]mydns[.]bz
ips-ndoc[.]mydns[.]bz
mydns[.]bz
nuser-login[.]ips-calledoc[.]mydns[.]bz
nid-user[.]ips-ndoc[.]mydns[.]bz
ips-calledoc[.]mydns[.]bz
caramel-latte[.]net
kakao[.]com-login[.]live-on[.]net
ips-krgo[.]mydns[.]bz
n-cloud[.]ips-krgo[.]mydns[.]bz
fuji-kouseihogo[.]net
japanloli[.]tech
maachang[.]com
blue[.]mydns[.]jp
n-store[.]ips-govkr[.]mydns[.]bz
kuncho-train[.]com
hirutec[.]com
webtaxdocderive[.]mydns[.]vc
docinfo[.]webtaxdocderive[.]mydns[.]vc
mojichuoichiba[.]com
evermedica02[.]jp
qnk[.]jp
kotatsuneko[.]jp
whitetubasa[.]com
hit24you-info[.]com
uncoops[.]com
ekdocs-hometax[.]mydns[.]bz
an[.]ekdocs-hometax[.]mydns[.]bz
dn[.]eodocs-hometax[.]mydns[.]bz
bn[.]ekdocs-hometax[.]mydns[.]bz
ewdoc-hometax[.]mydns[.]bz
dn[.]ekdocs-hometax[.]mydns[.]bz
dn[.]ewdoc-hometax[.]mydns[.]bz
eodocs-hometax[.]mydns[.]bz
eodocument-hometax[.]mydns[.]bz
cn[.]eodocument-hometax[.]mydns[.]bz
bn[.]eodocument-hometax[.]mydns[.]bz
amakui[.]com
atletico[.]tokyo
yoppyi[.]net
kakaocorp[.]com-login[.]live-on[.]net
ips-ecall[.]mydns[.]bz
nuser-info[.]ips-ecall[.]mydns[.]bz
9b-p[.]info
shack[.]jp
dn[.]eodocument-hometax[.]mydns[.]bz
an[.]eodocument-hometax[.]mydns[.]bz
xn--v92b[.]eodocument-hometax[.]mydns[.]bz
_[.]com-login[.]live-on[.]net
dn[.]ekdocument-hometax[.]mydns[.]bz
ekdocument-hometax[.]mydns[.]bz
info[.]dochostread[.]mydns[.]bz
dochostread[.]mydns[.]bz
eodoc-hometax[.]mydns[.]bz
cn[.]eodoc-hometax[.]mydns[.]bz
cn[.]oedocument-home[.]mydns[.]bz
oedocument-home[.]mydns[.]bz
lollipop[.]pgw[.]jp
vicky[.]mydns[.]jp
mail[.]shounan[.]jp
geiger[.]mydns[.]jp
paradise[.]mydns[.]jp
project[.]mydns[.]jp
takerusoftware[.]mydns[.]jp
ncs[.]mydns[.]jp
shira[.]su
nostr[.]shira[.]su
jq7atb[.]mydns[.]jp
blue2age[.]com
termdocdelegate[.]mydns[.]vc
bons6[.]com
shibutani[.]site
shibutani[.]biz
ysdmac[.]work
aristowork[.]com
hanamizuki[.]pgw[.]jp
invoice[.]ninvoicemanage[.]mydns[.]vc
info[.]ninvoicemanage[.]mydns[.]vc
wuas[.]work
kmmtm[.]net
edoc[.]donateusrdoc[.]mydns[.]vc
donateusrdoc[.]mydns[.]vc
edoc[.]officialdoccorp[.]mydns[.]vc
officialdoccorp[.]mydns[.]vc
edoc[.]npinvoicelab[.]mydns[.]vc
n-invoice[.]ips-gov[.]mydns[.]vc
ncorp-cloud[.]ips-doc[.]mydns[.]vc
ncorp-info[.]ips-store[.]mydns[.]vc
ninvoicemanage[.]mydns[.]vc
docinfo[.]checkforreceive[.]mydns[.]vc
doc[.]npinvoicelab[.]mydns[.]vc
npinvoicelab[.]mydns[.]vc
doc[.]ninvoicemanage[.]mydns[.]vc
checkforreceive[.]mydns[.]vc
nitsuke[.]com
ips-doc[.]mydns[.]vc
edoc-hometax[.]mydns[.]bz
nci[.]navrlogen[.]live-on[.]net
kak2ao[.]com-login[.]live-on[.]net
asdf[.]com-login[.]live-on[.]net
kakaocrop[.]com-auth[.]server-on[.]net
edocument-hometax[.]mydns[.]bz
nts-eml[.]mydns[.]bz
edoc-nts[.]mydns[.]bz
document-hometax[.]mydns[.]bz
com-login[.]live-on[.]net
cn[.]edocument-hometax[.]mydns[.]bz
cn[.]document-hometax[.]mydns[.]bz
navercorp[.]com-auth[.]server-on[.]net
outlook[.]server-on[.]net
docauthlink[.]mydns[.]vc
edoc[.]docauthlink[.]mydns[.]vc
iiailog[.]mydns[.]bz
nndiayou[.]mydns[.]bz
inyouirinfo[.]mydns[.]bz
inyoiurnfo[.]mydns[.]bz
kakao[.]com-auth[.]server-on[.]net
com-signin[.]live-on[.]net
ciliuicnck[.]mydns[.]bz
info[.]blogauthmanage[.]mydns[.]vc
invoice[.]mdocinfo[.]mydns[.]vc
cn[.]ciliuicnck[.]mydns[.]bz
n-store[.]nts-ncorp[.]mydns[.]vc
nid-user[.]nts-eml[.]mydns[.]vc
n-store[.]nts-eml[.]mydns[.]vc
nid-user[.]nts-nl[.]mydns[.]vc
bok[.]mydns[.]vc
nts-nl[.]mydns[.]vc
ips-store[.]mydns[.]vc
homecorpdep[.]mydns[.]vc
ifillog[.]mydns[.]bz
ligllilssyou[.]mydns[.]bz
n-cloud[.]nts-kit[.]mydns[.]vc
nts-kit[.]mydns[.]vc
download[.]bok[.]mydns[.]vc
nai[.]navoerlogin[.]keyword-on[.]net
docinfo[.]nportalonline[.]mydns[.]vc
jq2sai[.]mydns[.]jp
usr[.]nportalonline[.]mydns[.]vc
invoice[.]nportalonline[.]mydns[.]vc
nportalonline[.]mydns[.]vc
info[.]nportalonline[.]mydns[.]vc
ips-as[.]mydns[.]bz
oauth[.]contactdocid[.]server-on[.]net
bn[.]sevilverif[.]mydns[.]bz
accountndoc[.]server-on[.]net
nts-nidauth[.]mydns[.]bz
n-corp[.]nts-nidauth[.]mydns[.]bz
n-invoice[.]ips-as[.]mydns[.]bz
icoincfim[.]mydns[.]bz
nbd[.]icoincfim[.]mydns[.]bz
nad[.]ifcoinvfim[.]mydns[.]bz
ifcoinvfim[.]mydns[.]bz
cailiucnck[.]mydns[.]bz
sevilverif[.]mydns[.]bz
vernity[.]mydns[.]bz
logllilssyou[.]mydns[.]bz
dn[.]logllilssyou[.]mydns[.]bz
online-kt[.]server-on[.]net
cn[.]cailteve[.]mydns[.]bz
urabe[.]click
usrdocslink[.]server-on[.]net
embloger[.]server-on[.]net
myblogauth[.]mydns[.]vc
navrlogen[.]live-on[.]net
nbi[.]navrlogen[.]live-on[.]net
ntdocid[.]server-on[.]net
dn[.]incoinecfim[.]mydns[.]bz
cn[.]incoinecfim[.]mydns[.]bz
bn[.]incoincfim[.]mydns[.]bz
cn[.]incoincfim[.]mydns[.]bz
cn[.]sevilrverif[.]mydns[.]bz
invoice[.]myblogauth[.]mydns[.]vc
incoincfim[.]mydns[.]bz
dn[.]veraity[.]mydns[.]bz
dn[.]incoincfim[.]mydns[.]bz
docinfo[.]myblogauth[.]mydns[.]vc
info[.]myblogauth[.]mydns[.]vc
kakako[.]com-login[.]live-on[.]net
navercorp[.]com-signin[.]live-on[.]net
sevilrverif[.]mydns[.]bz
cn[.]veraity[.]mydns[.]bz
caliucnck[.]mydns[.]bz
an[.]veraity[.]mydns[.]bz
komusou[.]com
ncd[.]isyournfo[.]mydns[.]bz
infellog[.]mydns[.]bz
nbd[.]infellog[.]mydns[.]bz
auth[.]blogrighthome[.]server-on[.]net
blogrighthome[.]server-on[.]net
invoice[.]mydns[.]jp
nvc[.]invoice[.]mydns[.]jp
nid[.]usrdocslink[.]server-on[.]net
docs[.]usrdocslink[.]server-on[.]net
verify[.]usrdocslink[.]server-on[.]net
userdoc[.]webdoclnk[.]server-on[.]net
edoc[.]webdoclnk[.]server-on[.]net
nbd[.]nidayou[.]keyword-on[.]net
ncd[.]nidayou[.]keyword-on[.]net
ndd[.]calianck[.]keyword-on[.]net
nbd[.]calianck[.]keyword-on[.]net
nad[.]calianck[.]keyword-on[.]net
calianck[.]keyword-on[.]net
nid-user[.]ips-nid[.]mydns[.]vc
nid-invoice[.]ips-nid[.]mydns[.]vc
calicnck[.]mydns[.]bz
invoice[.]onlinedeposits[.]mydns[.]bz
ncd[.]sevirvrerif[.]keyword-on[.]net
ncd[.]lognisyou[.]live-on[.]net
nad[.]lognisyou[.]live-on[.]net
lognisyou[.]live-on[.]net
ncd[.]veraty[.]live-on[.]net
nbd[.]lognisyou[.]live-on[.]net
sevirvrerif[.]keyword-on[.]net
veraty[.]live-on[.]net
nid-check[.]nps-htax[.]live-on[.]net
ndd[.]sevirvrerif[.]keyword-on[.]net
nbd[.]veraty[.]live-on[.]net
ndd[.]lognisyou[.]live-on[.]net
nad[.]sevirvrerif[.]keyword-on[.]net
nad[.]veraty[.]live-on[.]net
usr[.]usermemberblog[.]mydns[.]vc
invoice[.]usermemberblog[.]mydns[.]vc
edoc[.]usermemberblog[.]mydns[.]vc
info[.]usermemberblog[.]mydns[.]vc
docinfo[.]usermemberblog[.]mydns[.]vc
usermemberblog[.]mydns[.]vc
binfo[.]embloger[.]server-on[.]net
chkblog[.]accountrecheck[.]server-on[.]net
nid[.]edoc[.]view[.]file[.]cto[.]com-mg[.]mydns[.]tw
com-view[.]mydns[.]tw
com-ces[.]keyword-on[.]net
contactdocid[.]server-on[.]net
edoc[.]contactdocid[.]server-on[.]net
pretix[.]iswa2[.]mydns[.]jp
pretalx[.]iswa2[.]mydns[.]jp
iswa2[.]mydns[.]jp
com-tree[.]mydns[.]tw
police[.]com-tree[.]mydns[.]tw
nid[.]police[.]com-tree[.]mydns[.]tw
edoc[.]view[.]com-mtc[.]server-on[.]net
nid[.]edoc[.]view[.]com-mtc[.]server-on[.]net
cn[.]infclog[.]mydns[.]bz
xiaoyux[.]mydns[.]jp
proeblog[.]server-on[.]net
kemonchu[.]com
officialnblog[.]server-on[.]net
user[.]officialnblog[.]server-on[.]net
isyounfo[.]mydns[.]bz
dn[.]nodeyou[.]mydns[.]bz
cn[.]nodeyou[.]mydns[.]bz
an[.]isyounfo[.]server-on[.]net
an[.]isyounfo[.]mydns[.]bz
nid-login[.]live-on[.]net
nodeyou[.]live-on[.]net
navercorp[.]nid-login[.]live-on[.]net
0algo1[.]com
zx-7r[.]com
verity[.]server-on[.]net
com-kro[.]mydns[.]tw
edoc[.]com-kro[.]mydns[.]tw
file[.]edoc[.]com-kro[.]mydns[.]tw
view[.]file[.]edoc[.]com-kro[.]mydns[.]tw
edoc[.]view[.]file[.]edoc[.]com-kro[.]mydns[.]tw
file[.]edoc[.]view[.]file[.]edoc[.]com-kro[.]mydns[.]tw
view[.]file[.]edoc[.]view[.]file[.]edoc[.]com-kro[.]mydns[.]tw
edoc[.]view[.]file[.]edoc[.]view[.]file[.]edoc[.]com-kro[.]mydns[.]tw
nood[.]edoc[.]view[.]file[.]edoc[.]view[.]file[.]edoc[.]com-kro[.]mydns[.]tw
nisshin-net[.]com
cto[.]com-mg[.]mydns[.]tw
yynavi[.]wjg[.]jp
sakuradia[.]llc
info[.]membersverify[.]server-on[.]net
eriko[.]click
tetsujiroh[.]com
twinstarsystems[.]net
blog[.]daemon[.]asia
214[.]accountrecheck[.]server-on[.]net
137[.]214[.]accountrecheck[.]server-on[.]net
102[.]137[.]214[.]accountrecheck[.]server-on[.]net
27[.]102[.]137[.]214[.]accountrecheck[.]server-on[.]net
dns[.]ntt-doc[.]live-on[.]net
dns-info[.]ntt-doc[.]live-on[.]net
kesemory[.]com
accountrecheck[.]server-on[.]net
nid[.]accountrecheck[.]server-on[.]net
account-v3sign[.]server-on[.]net
com-mg[.]mydns[.]tw
delivery[.]auction[.]server-on[.]net
noteyou[.]live-on[.]net
n-info[.]bill-nts[.]server-on[.]net
nid[.]police[.]com-view[.]mydns[.]tw
junkcaptor[.]net
nld[.]edoc[.]view[.]com-ces[.]keyword-on[.]net
mld[.]edoc[.]view[.]file[.]com-life[.]keyword-on[.]net
nid-check[.]nts-co[.]server-on[.]net
callteve[.]live-on[.]net
an[.]imortinfo[.]live-on[.]net
cn[.]imortinfo[.]live-on[.]net
noticingyou[.]mydns[.]bz
infelog[.]mydns[.]bz
nlink[.]mydns[.]bz
inyounfo[.]mydns[.]bz
nid-check[.]ntskr[.]server-on[.]net
npskr[.]server-on[.]net
nid-check[.]nps-doc[.]server-on[.]net
n-info[.]nps-doc[.]server-on[.]net
mid[.]edoc[.]view[.]file[.]cot[.]man[.]com-war[.]daemon[.]asia
dns[.]nps-doc[.]server-on[.]net
cn[.]inyounfo[.]mydns[.]bz
check-info[.]home-tax[.]server-on[.]net
an[.]noticingyou[.]server-on[.]net
an[.]inyounfo[.]mydns[.]bz
com-ace[.]live-on[.]net
dns[.]doc-nps[.]server-on[.]net
edoc[.]invoicedocdeposit[.]mydns[.]bz
invoicedocdeposit[.]mydns[.]bz
invoice[.]docsecure[.]mydns[.]bz
nid[.]invoicedeposit[.]server-on[.]net
docsecure[.]mydns[.]bz
nid[.]edoc[.]view[.]com-ace[.]live-on[.]net
a98[.]biz
dogyan[.]net
bn[.]imortinfo[.]live-on[.]net
dn[.]imortinfo[.]live-on[.]net
imortinfo[.]live-on[.]net
nekotabi-archive[.]com
arrivee[.]net
lunapooh[.]com
nts-go[.]server-on[.]net
com-swod[.]mydns[.]tw
nood[.]edoc[.]view[.]file[.]com-life[.]keyword-on[.]net
com-life[.]keyword-on[.]net
nid[.]edoc[.]view[.]file[.]cot[.]man[.]com-swod[.]mydns[.]tw
urapara[.]site
vrcworldtour[.]com
mood[.]edoc[.]view[.]file[.]com-life[.]keyword-on[.]net
eblogauths[.]server-on[.]net
confirmusrdoc[.]mydns[.]bz
wwwhirax[.]net
n-info[.]nts-go[.]server-on[.]net
dns-info[.]ntsbiling[.]server-on[.]net
check-info[.]nts-go[.]server-on[.]net
ntsbiling[.]server-on[.]net
htax-kr[.]server-on[.]net
hometxschedule[.]mydns[.]bz
aaaaa[.]mydns[.]jp
man[.]com-swod[.]mydns[.]tw
cot[.]man[.]com-swod[.]mydns[.]tw
file[.]cot[.]man[.]com-swod[.]mydns[.]tw
edoc[.]view[.]file[.]cot[.]man[.]com-swod[.]mydns[.]tw
view[.]file[.]cot[.]man[.]com-swod[.]mydns[.]tw
ninvoicesecure[.]mydns[.]jp
authenticate[.]ntaxhomedoc[.]live-on[.]net
oauth[.]nofficialinvoice[.]live-on[.]net
invoicetxhome[.]server-on[.]net
one[.]usrinvoice[.]mydns[.]bz
usrinvoice[.]mydns[.]bz
ntaxhomedoc[.]live-on[.]net
nofficialinvoice[.]live-on[.]net
file[.]cto[.]com-mg[.]mydns[.]tw
mid[.]edoc[.]view[.]file[.]com-ox[.]mydns[.]jp
cloud162[.]biz
mobile[.]auction[.]server-on[.]net
auction[.]server-on[.]net
file[.]com-life[.]keyword-on[.]net
view[.]com-ces[.]keyword-on[.]net
edoc[.]view[.]com-ace[.]live-on[.]net
view[.]com-ace[.]live-on[.]net
edoc[.]view[.]com-ces[.]keyword-on[.]net
docsvccorp[.]live-on[.]net
anone[.]mydns[.]bz
cn[.]anone[.]mydns[.]bz
nld[.]mois[.]com-coe[.]live-on[.]net
nid[.]mois[.]com-coe[.]live-on[.]net
com-coe[.]live-on[.]net
mois[.]com-coe[.]live-on[.]net
nood[.]edoc[.]view[.]file[.]com-ox[.]mydns[.]jp
google[.]userauthority[.]server-on[.]net
userauthority[.]server-on[.]net
pop[.]ntdoccorps[.]mydns[.]bz
edoc[.]nationaltaxdoc[.]server-on[.]net
edoc[.]ntdoccorps[.]mydns[.]bz
verifys[.]nationaltaxdoc[.]server-on[.]net
userlnk[.]nationaltaxdoc[.]server-on[.]net
qwes[.]nationaltaxdoc[.]server-on[.]net
usrlnk[.]nationaltaxdoc[.]server-on[.]net
dn[.]seververif[.]live-on[.]net
seververif[.]live-on[.]net
usr[.]docsdeliver[.]mydns[.]jp
docinfo[.]docsdeliver[.]mydns[.]jp
infosevres[.]live-on[.]net
hometxdoc[.]mydns[.]bz
oauth[.]npuserdoc[.]live-on[.]net
taxdepcorp[.]mydns[.]bz
npuserdoc[.]live-on[.]net
nationalport[.]live-on[.]net
nationalsecsvc[.]mydns[.]bz
yxuvvbn[.]tiang[.]server-on[.]net
com-de[.]mydns[.]jp
com-ever[.]wjg[.]jp
kakao[.]com-info[.]server-on[.]net
com-info[.]server-on[.]net
an[.]verifyserve[.]live-on[.]net
verifyserve[.]live-on[.]net
piechama[.]jp
bn[.]anone[.]live-on[.]net
anone[.]live-on[.]net
tiang[.]mydns[.]bz
an[.]tiang[.]mydns[.]bz
hashiken[.]org
infolog[.]live-on[.]net
clink[.]live-on[.]net
an[.]infeyou[.]live-on[.]net
dn[.]infolog[.]live-on[.]net
an[.]infolog[.]live-on[.]net
infeyou[.]live-on[.]net
go-ntax[.]live-on[.]net
nid-check[.]go-ntax[.]live-on[.]net
mid[.]edoc[.]view[.]com-sos[.]server-on[.]net
blogcorp[.]com-blog[.]0am[.]jp
view[.]com-sos[.]server-on[.]net
com-blog[.]0am[.]jp
nid[.]blogcorp[.]com-blog[.]0am[.]jp
com-sos[.]server-on[.]net
edoc[.]view[.]com-sos[.]server-on[.]net
usernotifications[.]server-on[.]net
securevalidation[.]live-on[.]net
google[.]usernotifications[.]server-on[.]net
google[.]securevalidation[.]live-on[.]net
hirax[.]net
calleve[.]server-on[.]net
dn[.]calleve[.]server-on[.]net
r-pu[.]com
tkt-eshop[.]com
com-aura[.]dix[.]asia
dragon[.]alphablend[.]org
alphablend[.]org
waki-jp[.]com
calleve[.]live-on[.]net
an[.]calleve[.]live-on[.]net
gd30sec[.]com
mybox[.]com-kami[.]pgw[.]jp
mood[.]myboxe[.]view[.]com-kami[.]pgw[.]jp
mood[.]mybox[.]com-kami[.]pgw[.]jp
com-kami[.]pgw[.]jp
nts-edoc[.]live-on[.]net
nts-edoc[.]server-on[.]net
mld[.]mybox[.]com-kami[.]pgw[.]jp
cn[.]seververif[.]server-on[.]net
t2m-tech[.]com
mybox[.]com-cool[.]mydns[.]bz
bn[.]tiang[.]server-on[.]net
tiang[.]server-on[.]net
qqsite[.]server-on[.]net
nb[.]checkyouinfo[.]server-on[.]net
mail[.]mydns[.]bz
andmnsn[.]com
niconet-web[.]com
haruna-yuri[.]jp
ponsuke-web[.]com
unlink[.]server-on[.]net
callnotice[.]server-on[.]net
na[.]lognotice[.]server-on[.]net
ne[.]checkyouinfo[.]live-on[.]net
checkyouinfo[.]live-on[.]net
nc[.]callnotice[.]server-on[.]net
cn[.]unlink[.]server-on[.]net
pgw[.]jp
ohllengeapplication[.]com
oyagine[.]com
ginpode[.]com
lognotice[.]server-on[.]net
sbcservice[.]net
na[.]com-claim[.]mydns[.]bz
com-claim[.]mydns[.]bz
satoraichi[.]net
myapps[.]mydns[.]jp
gmaty[.]com
anchovy-s3[.]net
miku[.]jp
nakajima[.]live
donaishitanyarobert[.]mydns[.]jp
yizawa[.]net
jh1hso[.]com
nobuyasu[.]net
osc2025-nagoya[.]com
continuous-government[.]jp
srgn[.]jp
crunch-lab[.]net
tshimizu[.]net
not[.]osaka
dynamicpub[.]net
ntochi[.]com
akira-ggwp[.]com
onomimono[.]net
kspw[.]info
jf3goh[.]mydns[.]jp
okozkai[.]net
marinsnowwrx[.]net
molcoco[.]com
radioham[.]mydns[.]jp
catzpaw[.]net
aber[.]jp
system-ds[.]info
noz[.]nz
mynethome[.]orettaworks[.]com
wbird[.]net
infinity[.]nagoya
soyosya[.]jp
mail[.]soyosya[.]jp
blog[.]mmaakkyyii[.]com
macavity[.]jp
maruapp[.]com
sakanoue[.]nu
wrapbitcoin[.]0am[.]jp
frenziedhive[.]site
hgrm[.]net
madanna[.]info
silva-net[.]com
motchy870[.]com
okomeblog[.]blog
web-simpro[.]com
hanege[.]com
falstoa[.]com
kirin-san[.]net
kirinsfloor[.]net
suenaga[.]work
yokohama-midori-boys[.]com
alltsurumi[.]com
1sei[.]com
newvictory[.]net
takasawa[.]yokohama
xn--48j330igq2b[.]com
vgi[.]it[.]com
yonekawa[.]net
nw[.]444[.]mydns[.]jp
taga[.]mydns[.]jp
boota[.]mydns[.]jp
qq12548[.]mydns[.]jp
uchishiba001[.]0am[.]jp
droneport[.]yamatsu[.]info
flydrone[.]yamatsu[.]info
asaka-sobunsha[.]com
alpha-net[.]info
terve[.]jp
itoho[.]wjg[.]jp
suzuri-sumi[.]online
cloud-castle[.]jp
myfreeya[.]net
cherryserver[.]jp
kenokeno[.]org
mmaakkyyii[.]com
seitan[.]tokyo
iikagen[.]net
naoto-yamaguchi[.]com
884k23[.]com
chicen-mentaiko[.]com
t20527[.]net
cultivator[.]co[.]jp
starewind[.]net
maeda-kigata[.]com
csl-takeda-lab[.]com
rtc[.]mydns[.]jp
leitz[.]jp
video[.]pgw[.]jp
masturbation[.]asia
retrev[.]online
me-ru-1106[.]com
chi-aes[.]click
riti0208[.]com
machi-comi[.]wjg[.]jp
nc[.]tane[.]mydns[.]jp
fang[.]sh[.]cn
alst[.]mydns[.]jp
yamatsu[.]info
factory[.]wjg[.]jp
vmc-shonan[.]com
camcam[.]work
sanyo[.]us
jo3ujz[.]com
guraia[.]jp
blue5001[.]com
mochiko[.]work
garlicport[.]com
mdoty[.]net
zfree[.]biz
hakodate-ikuseien[.]net
gingko[.]jp
alnico-blue[.]com
godaicloud[.]com
blauvier[.]net
k3i[.]jp
mydns[.]vc
w-zero3[.]wiki[.]class0[.]net
takenoco[.]blog
photo-station[.]jp
456986[.]net
nuzarashi[.]com
asaka[.]com
bellwood-software[.]com
ismetaoperation[.]com
0j0[.]jp
mikam-stg[.]xyz
kaflife[.]net
linux-wordpress[.]info
24echizentakefu[.]com
flame-server[.]com
tomorrownetworks[.]site
jimaoka[.]com
rezavoircats[.]com
ishidajuku[.]com
neconini[.]com
class0[.]net
unyaa[.]net
matsumoto[.]work
gisshop[.]net
ptr3[.]jp
mikanberry[.]com
add9[.]org
acwwp[.]com
zyandyoko[.]com
ralshe[.]com
bigpig[.]jp
maygraphics[.]org
inexio[.]info
pc-sys-ad[.]com
tmphero[.]net
kiyonaga-ya[.]com
npo-ok[.]tokyo
nyaunyau[.]net
sunphonix39[.]com
shounan[.]jp
hotspare[.]net
n-laboratory[.]net
j310jp[.]com
c-piece[.]com
gan3[.]net
gaiheki-pro[.]net
barguest[.]net
speedcolor[.]work
kosupe[.]com
fujii3[.]site
tos-web[.]jp
tk-markets[.]cyou
pyonsu2023[.]com
cvs-gw[.]net
mayosaba[.]net
msdco[.]space
ichikawa[.]org
diverting-db[.]info
ryusui[.]site
tendersnow[.]net
ygg-drasil[.]net
spotpico[.]com
twins-heart[.]net
locking-smarting[.]jp
plants-style[.]com
shinya-nagashima[.]biz
planet-star[.]net
kogosei[.]net
mast23mc[.]net
villa-camera[.]com
kota-inui[.]com
nfo-titech[.]jp
hogefuga[.]xyz
kaeruken[.]com
nb3[.]jp
nicomin[.]com
federal[.]de[.]com
friend-computer[.]biz
tdj[.]nara[.]jp
windsurfer[.]jp
matomerr[.]com
windsurfin[.]jp
orangetakam[.]com
nullpod[.]net
cleanroom[.]jp
puni2complex[.]net
natsu-matsure[.]xyz
niur[.]net
fujisawa[.]life
rizm[.]dev
ripplelapple[.]online
nago3[.]net
eoceanblue[.]com
anchovy-s3[.]xyz
kaizou[.]net
utty[.]info
fuurin[.]info
ktcp[.]net
digitalworld[.]link
hades-physics[.]com
sasaki-yoyaku[.]com
otsuka-b[.]com
ito[.]info
kanbetu01[.]genba-monitor[.]0g0[.]jp
tsuchinokometal[.]com
lindenbaum[.]online
nyan5[.]com
umegatsubo[.]org
wadaiko[.]org
takamuras[.]org
disn-data[.]com
inocchi[.]com
e-magazine[.]spaceweather[.]or[.]jp
veryfree[.]click
einstein-cross[.]info
sdust[.]info
talentfocus[.]online
oipest[.]com
kk-marutoyo[.]com
cosmic-heart[.]com
710[.]red
tsubaco[.]net
sugimo[.]com
kobayashi-portfolio[.]net
all-studio[.]sbs
shumiafu[.]com
ukou-sys[.]com
e1600[.]com
dream-chip[.]jp
cloud[.]mydns[.]bz
2019-ncov[.]jp
seektone[.]com
teekee[.]net
severzemlya[.]com
bl-ld[.]com
amefur[.]dev
xnanx[.]org
noraneko-gundan[.]club
noth[.]moe
ipv4[.]mydns[.]jp
zoomdevtester[.]daemon[.]asia
akatsuki[.]co[.]jp
ftp[.]mydns[.]vc
sundoya[.]com
atyontyon[.]xyz
senkouhanabi[.]com
myuto[.]net
niseng[.]biz
takamiya[.]net
amelkane[.]com
arciel[.]link
stream-live[.]net
ubilabo[.]net
zeissphoto[.]org
dashix[.]com
solaserver[.]space
89[.]117[.]74[.]49
AS40021 Contabo Inc 🇺🇸

2
8
809




1
31
959


29 Oct 2025
객체지향 이야기 나와서 하는 말.
객체지향에 있어서 정말 중요한게 무엇일까요...? 단 하나 지켜야할 원칙 0위를 꼽으라면 무엇을 꼽을까요? SOLID 원칙? 아니면 각종 객체지향 팁들?
저는 이걸 꼽고싶습니다. 객체는 생성자가 호출되는 순간부터 사용 준비가 끝나야한다.
물론 외부 파일에 의존하는 객체나 페킷같은걸 객체로 표현하면 이게 아닐 수도 있어요. 그런데 그런 예외적인걸 제외하고 Class0 obj0(아무리 인자가 많더라도); 이 순간부터 객체는 가용 상태여야합니다.
요즘 빌더패턴이라던가 다양한 패턴으로 미완성된 생성자를 조금 정당화해주는 코드가 늘어났는데... 솔직히 말하자면 회의적입니다. 이러면 해당 클래스를 어떻게 써야할지 다른 사람이 모를 수 있어요.
클래스 사용법은 생성자의 인자로 이미 드러나있고 그것만 채워넣으면 바로 작동하도록 해야합니다. 물론 필요에 따라 객체의 상태를 메서드로 변경하거나 메서드 호출로 기능이 실행됨에 따라 사이드 에펙트로 객체에 변화가 생기는건 괜찮아요.
이렇게 사용하면 버그를 고칠 때도 정말 유용합니다.
그림을 그리려면 종이가 필요합니다. 종이에 그림을 그리려고 했는데 하기 전에 내가 표백도 해야하고 그림을 A4규격으로 잘라야한다면 그건 잘못된 종이입니다.
먼저 A4크기에 표백이 된 것이 종이의 디폴트입니다. 그래서 하다못해 디폴트 값이라도 정해두면 좋죠. 종이를 풀칠해서 이어붙이든 물들이든 그건 표준적 A4종이가 재공된 후의 일입니다. 객체도 마찬가지예요. 아주 최소한 작동해야하는데 필요한 값은 생성 순간에 모두 요청해야하고 없으면 객체생성이 안되는게 맞습니다. 순서상 특수한 예외가 없다면요.
1
2
3
139


18 Jul 2025
作品のタイトル
農家の娘
#MIX30MLコンテスト
作品紹介コメント
class0の無職の冒険者。ある日住んでいる村が魔物に襲われ壊滅。復讐の為に冒険者になった。装備品は村の金持ちの家から拝借した物。職を持たず、PTには誘われないためソロでクエストをこなし生きている。




2
29
206
16,833

10 Jul 2025
import torch
import torch.nn as nn
import torch.optim as optim
import numpy as np
import matplotlib.pyplot as plt
# Toy dataset: two Gaussian blobs for binary classification
np.random.seed(42)
class0 = np.random.randn(100, 2) * 0.5 np.array([0, 0])
class1 = np.random.randn(100, 2) * 0.5 np.array([2, 2])
data = np.vstack([class0, class1])
labels = np.hstack([np.zeros(100), np.ones(100)])
data_tensor = torch.tensor(data, dtype=torch.float32)
labels_tensor = torch.tensor(labels, dtype=torch.long)
# Neural ODE dynamics: parameterizes dz/dt
class ODEFunc(nn.Module):
def __init__(self, dim):
super().__init__()
self.net = nn.Sequential(
nn.Linear(dim, 50),
nn.Tanh(),
nn.Linear(50, dim)
)
def forward(self, t, z):
return self.net(z)
# Euler method for forward ODE solve (N steps approximate continuous integration)
def euler_solve(func, z0, t0=0.0, t1=1.0, N=50):
dt = (t1 - t0) / N
z = z0
t = t0
for _ in range(N):
z = z dt * func(t, z)
t = dt
return z
# Full model: ODE evolution classifier
class NeuralODEClassifier(nn.Module):
def __init__(self, input_dim, num_classes):
super().__init__()
self.func = ODEFunc(input_dim)
self.classifier = nn.Linear(input_dim, num_classes)
def forward(self, x):
z_T = euler_solve(self.func, x)
return self.classifier(z_T)
# Training
model = NeuralODEClassifier(2, 2)
optimizer = optim.Adam(model.parameters(), lr=0.01)
criterion = nn.CrossEntropyLoss()
for epoch in range(100):
optimizer.zero_grad()
outputs = model(data_tensor)
loss = criterion(outputs, labels_tensor)
loss.backward()
optimizer.step()
if epoch % 20 == 0:
acc = (outputs.argmax(1) == labels_tensor).float().mean().item()
print(f"Epoch {epoch}: Loss = {loss.item():.4f}, Accuracy = {acc:.4f}")
# Visualization (optional, for demo)
with torch.no_grad():
xx, yy = np.meshgrid(np.linspace(-1, 3, 50), np.linspace(-1, 3, 50))
grid = torch.tensor(np.c_[xx.ravel(), yy.ravel()], dtype=torch.float32)
preds = model(grid).argmax(1).reshape(xx.shape)
plt.contourf(xx, yy, preds.numpy(), alpha=0.8)
plt.scatter(data[:, 0], data[:, 1], c=labels)
plt.title("Decision Boundary via Neural ODE Trajectory")
plt.show()
1
2
240

29 Apr 2025



1
11
660

14 Mar 2025
今零式集合を加工してるんだけど、私のClass0顔がいい〜可愛い〜あっ私のじゃなかった…を繰り返してる…
先生ポジで参加してたら私のClass0と言えたのになぁ…
2
5
244

こちらの記事で #三菱 のRJ71SEIP91-T4を使用しで #TURCK 社のTBIP-L5-4FDI-4FDXと #CIPSAFETY Class0通信を0から構築し、SafetyFBを使用し安全プログラムを作成します。
さ、FAを楽しもう。
#PLC #Safety #EthernetIP
soup01.com/ja/2025/01/02/pos…
1
1
13
591

3 Feb 2025
🚀 Class 5 of the Job Ready AI Powered Cohort by @sheryians_ (Sheryians Coding School)
📚 Today's Focus:
Intro to CSS, selectors, precedence, font & text properties, box model, borders, backgrounds, and gradients.
@harshbhaiyaa #Day0 #Class0 #100DaysOfLearning #100DaysOfCode

2
53

29 Jan 2025
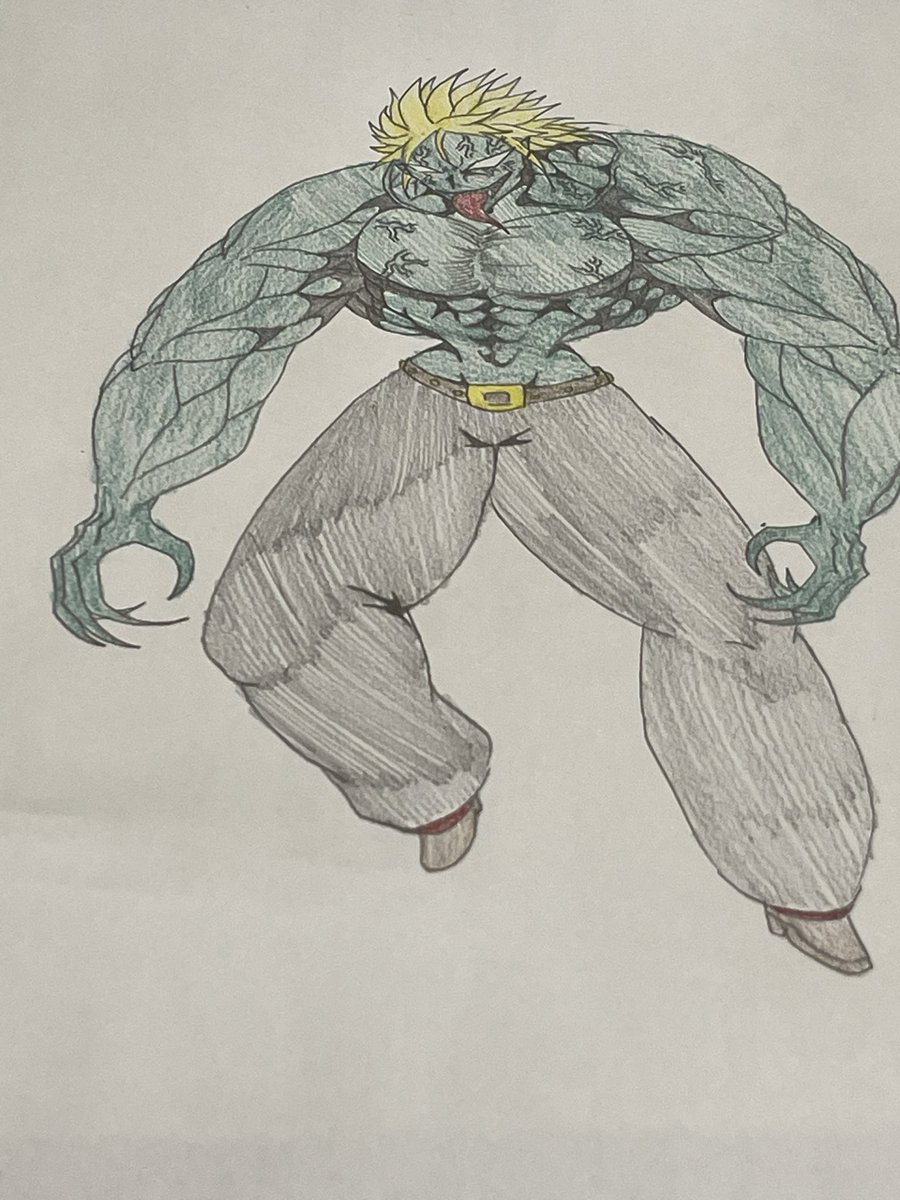
犯罪組織【Class0】創設者 覇者マスターゼドム
能力、硬化
肉体を硬化させる能力
身長、3m54cm
体重、89.5kg
年齢、数千歳
種族、人間
誕生日5月11日
好きな食べ物
鯖と豚汁
嫌いな食べ物
ライム

2
56
29 Jan 2025
犯罪組織【Class0】創設者
覇者マスターゼドム
#創作
#絵描き
#オリキャラ
#アナログ絵
#オリキャライラスト
#絵描きさん交流会
#絵描きさんと繫がりたい
#絵描きさんフォロバ100
#絵描きさんとつながりたい
#絵描きさんと仲良くなりたい
#絵描きフォロバ100

1
9
132
29 Jan 2025
犯罪組織【Class0】幹部 傭兵 リザレクション
#創作
#絵描き
#アナログ絵
#オリキャラ
#オリキャライラスト
#絵描きさん交流会
#絵描きさんと繋がりたい
#絵描きさんと仲良くなりたい
#絵描きフォロバ100
#絵描きさんとつながりたい

1
10
88
29 Jan 2025
犯罪組織【Class0】幹部 不死身ノ狂人
マッハゾンビ
#創作
#異形
#絵描き
#アナログ絵
#オリキャラ
#オリキャライラスト
#絵描きさんと仲良くなりたい
#絵描きさんと繋がりたい
#絵描きさんと繋がたい
#絵描きさんとつながりたい
#絵描きフォロバ100
#絵描きさんフォロバ100
1
17
149
28 Jan 2025
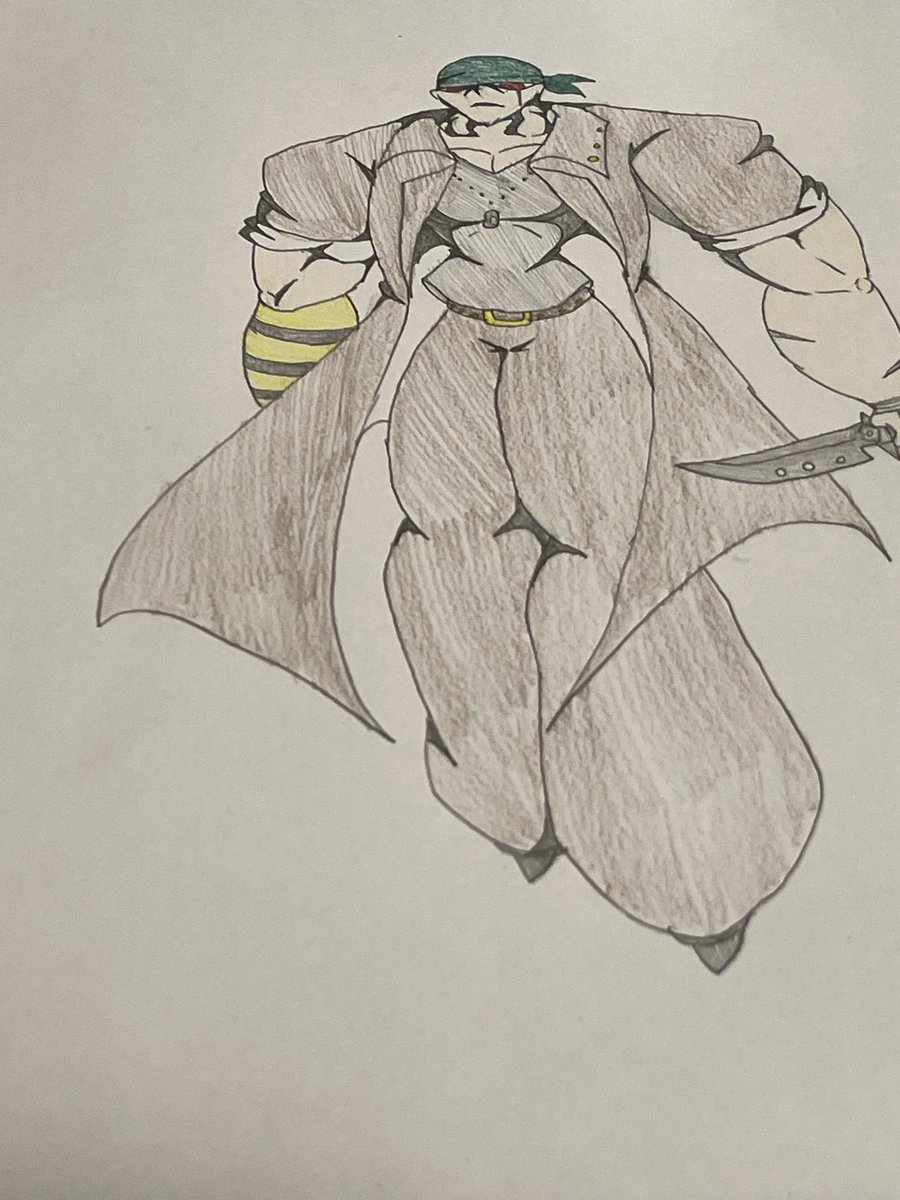
犯罪組織【Class0】幹部 傭兵 ナックル
能力、大雀蜂
大雀蜂に変異する能力
身長、2m61cm
体重、68.1kg
年齢、45歳
種族、人間
誕生日7月5日
好きな食べ物
ポップコーン(キャラメル味)
嫌いな食べ物
アサリ
1
154