
Jun 9
Sang ingatan: menghitung tanpa duplikasi
Detektor melihat mobil yang sama di bingkai demi bingkai. Bagaimana menghitungnya sekali saja?
DeepSORT memberi tiap kendaraan ID unik. Lalu garis maya melintang jalan — seperti gerbang: lewat sekali, dihitung sekali.
1
34
Jun 9
Para pemainnya — bayangkan seperti kru berita TV:
- Satu operator kamera per siaran (masing-masing satu worker thread)
- "Mata" yang mengenali kendaraan (YOLO)
- Asisten yang mengingat tiap mobil (DeepSORT)
- Meja kendali, arsip, dan layar yang Anda tonton
1
70

May 30
And camera angle
What I actually want this to become: proper DeepSORT or ByteTrack so vehicles don’t lose their ID when they cross paths. Real lane detection so speed limits can be applied per lane.
1
2
27



Mar 14
Under the hood you typically see a stack like:
•vision models (YOLO/DETR variants
for object detection)
•segmentation models for precise
geospatial footprints
•tracking algorithms (SORT/
DeepSORT-like)
•trajectory modeling over time
windows
This converts raw imagery into persistent tracked objects.
1
4
38

Feb 26
Full Match Video
↓
Player Detection (YOLO)
↓
Tracking (DeepSort)
↓
Event Detection (Audio Vision)
↓
Clip Extraction (FFmpeg)
↓
Compilation (MoviePy)
Most of the source code() are on GitHub, An Ai agent can help set it all up or just dm.
4
42
4,682
Feb 26
Full Match Video
↓
Player Detection (YOLO)
↓
Tracking (DeepSort)
↓
Event Detection (Audio Vision)
↓
Clip Extraction (FFmpeg)
↓
Compilation (MoviePy)
You can find source code of each on GitHub. (You gotta be a lil technical to set it up.)
3
1
55
3,571

13 Nov 2025
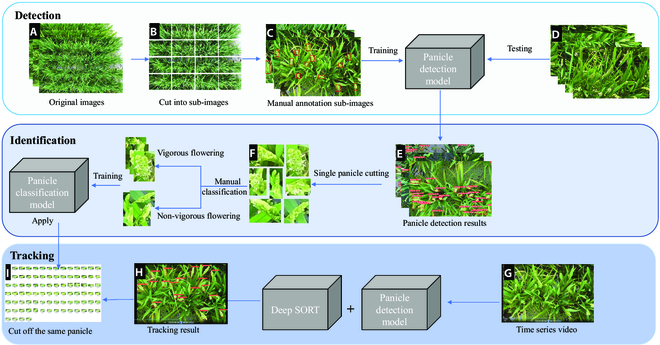
New study uses YOLO v5, ResNet50, and DeepSORT to analyze rice panicle traits under varying nitrogen levels. Results show high accuracy in panicle counting and heading date estimation, revealing detailed flowering changes. #DeepLearning
Details: doi.org/10.34133/plantphenom…
2
4
236

15 Jul 2025
I learnt how DeepSORT combines Kalman Filter, Hungarian Algorithm, and deep appearance descriptors for real-time object tracking, reducing identity switches and handling occlusion better than traditional methods @lftechnology #60DaysOfLearning2025 #LearningWithLeapfrog #LSPPDay45
2
233

4 Jul 2025
DJ Burger&Dafro _ Broken journey
DeepSort 95 _Could you
Speaknice&Dafake- Flip side feel
DjBusary_Hot air
DJ Busary,Inqfive,DjDinho-The soul key
Citizen Sthee - Havoc
Artwork sound -come jesus
Blactear, PandoG -Ambient light
Atlas-Moth
Dafro,Adhesive Twins-Zithande
1
2
12
1,095
2 Jul 2025
#LSPPDay32
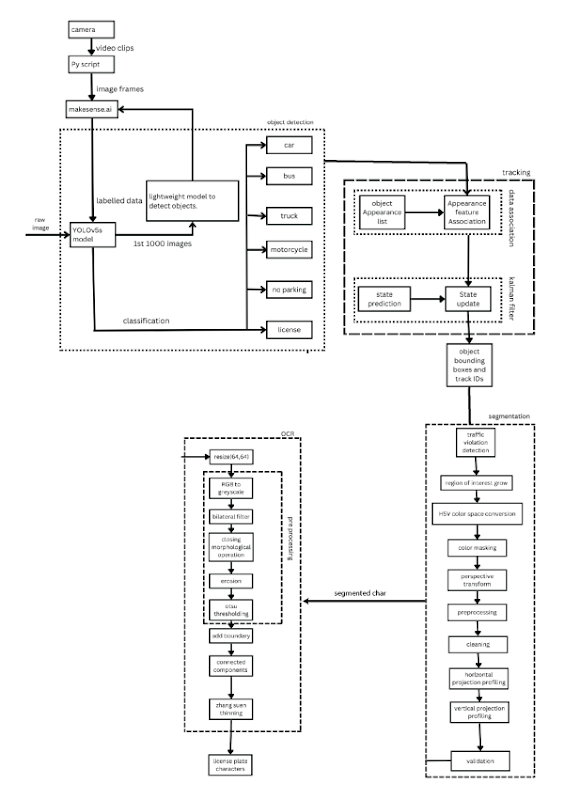
Today I studied and modified a full pipeline for detecting traffic violations using Python. Used YOLOv5 for object detection, DeepSORT for tracking, and OCR and image processing for reading license plates.
#60DaysOfLearning2025
@lftechnology
6
206

5 Jun 2025
even with all this rich context, i am unable to get smolvlm to use this, maybe i am missing something somewhere.
here is the colab notebook of work done so far!
colab.research.google.com/dr…
here is the notebook i referred for deepsort tracker by roboflow:
colab.research.google.com/gi…
and here is the blog that i referred for smolvlm2:
huggingface.co/blog/smolvlm2
(by the way i love how power packed this model is, thanks @mervenoyann, @ClementDelangue and @huggingface)
1
3
194
5 Jun 2025
ramping up on roboflow supervision and trackers
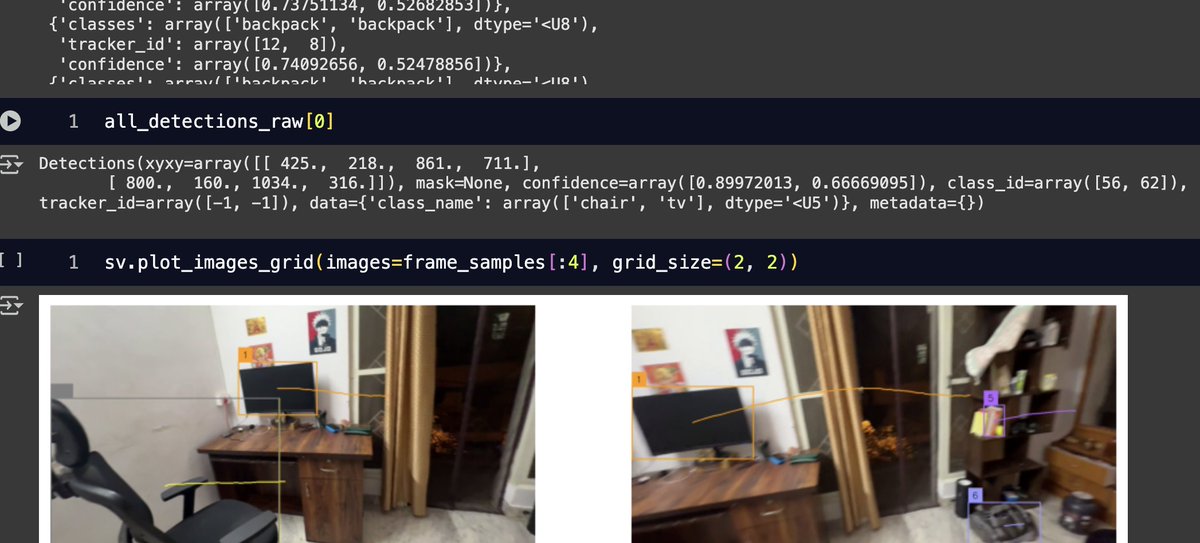
i ran very room video through roboflow's DeepSORT tracker to understand what outputs look like and if this idea is feasible at all?
i observed that a detection object has bounding box coordinate, confidence score, (unique) object id. i think this is pretty useful information.
i accumulated all these detections in an array and one shotted this with vlm, just to see what happens. as expected it wasn't good and model outputted some gibberish.
3/n
1
2
118

14 May 2025
we later want to used the fine-tuned model in DeepSORT, ByteTrack, StrongSORT...
1
3
138


26 Apr 2025
I've used DeepSORT before. Using a different tracker right now. For object detection I'm currently using D-FINE. Processing 10 cameras with an RTX 3080. github.com/Peterande/D-FINE
1
2
50

24 Apr 2025
🔥 Trackers by @roboflow is officially released 🚀
🧠 Combines SoTA object detectors with powerful multi-object-tracking techniques like SORT and DeepSORT, with more advanced trackers on the way!
🏡 github.com/roboflow/trackers
📚 roboflow.github.io/trackers
📣 Huge shoutout to @skalskip92 for collaborating with me closely!
(1/3)🧵👇
2
3
29
2,322
24 Apr 2025
trackers v2.0.0 is out
combo object detectors from top model libraries with multi-object tracker of your choice
for now we support SORT and DeepSORT; more trackers coming soon
link: github.com/roboflow/trackers
34
259
1,986
205,205
16 Apr 2025
we're building a fully open-source tracking library!
- combo object detectors from top model libraries (ultralytics, transformers, mmdetection) with tracker of your choice
- for now we support SORT and DeepSORT; more trackers coming soon
link: github.com/roboflow/trackers
9
38
386
13,604