
30 Aug 2023
#AI #robotics #softrobotics #Koopman #systemsandcontrol science.org/doi/10.1126/scir…
Congrats team Ervin Kamenar David Haggerty Michael Banks Alan Cao Patrick Curtis Elliot W. Hawkes!
13
1,012

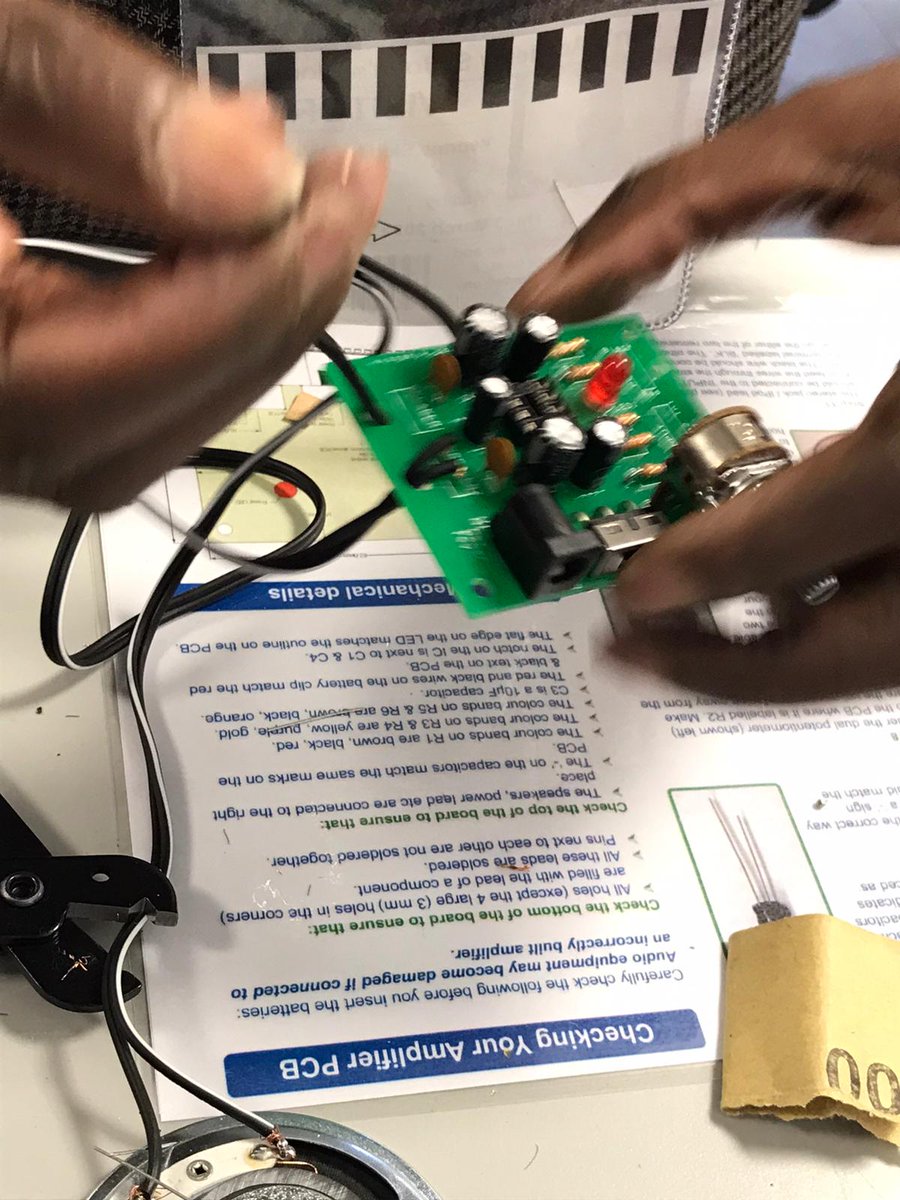
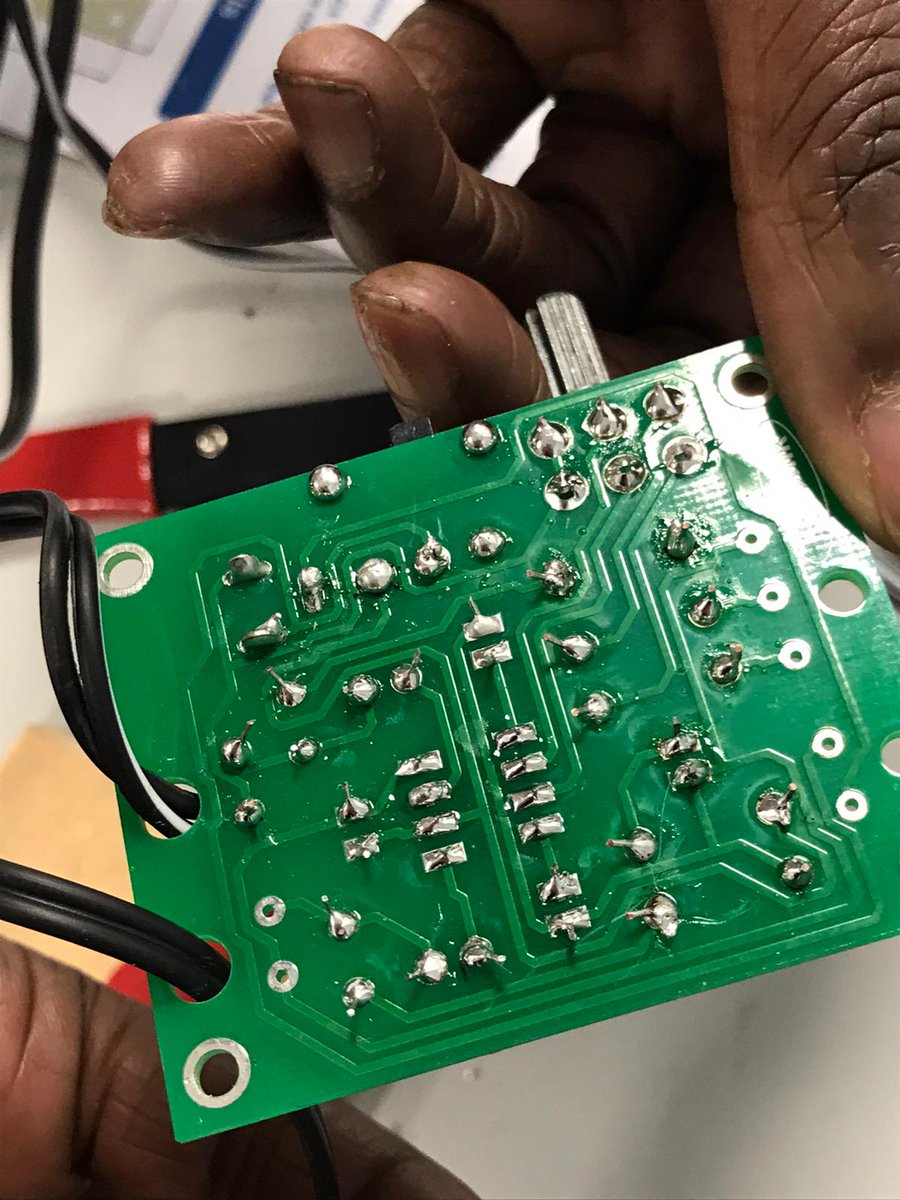
It was a hands-on #core #subjectspecific #training day for our #DesignAndTechnology cohort today @Harris_SJW with @HfedDesign_tech #electronics #SystemsAndControl @DTassoc @HarrisFed


1
6

23 Aug 2021
Postdoc Deep Learning for Human-Robot Interaction – Netherland
nviewscareer.com/job/postdoc…
#phd #Phdposition #TUDelft #Netherland #systemsandcontrol #robotics #appliedmathematics #artificialintelligence #machinelearning #phdstudies
1
1

18 Jan 2021
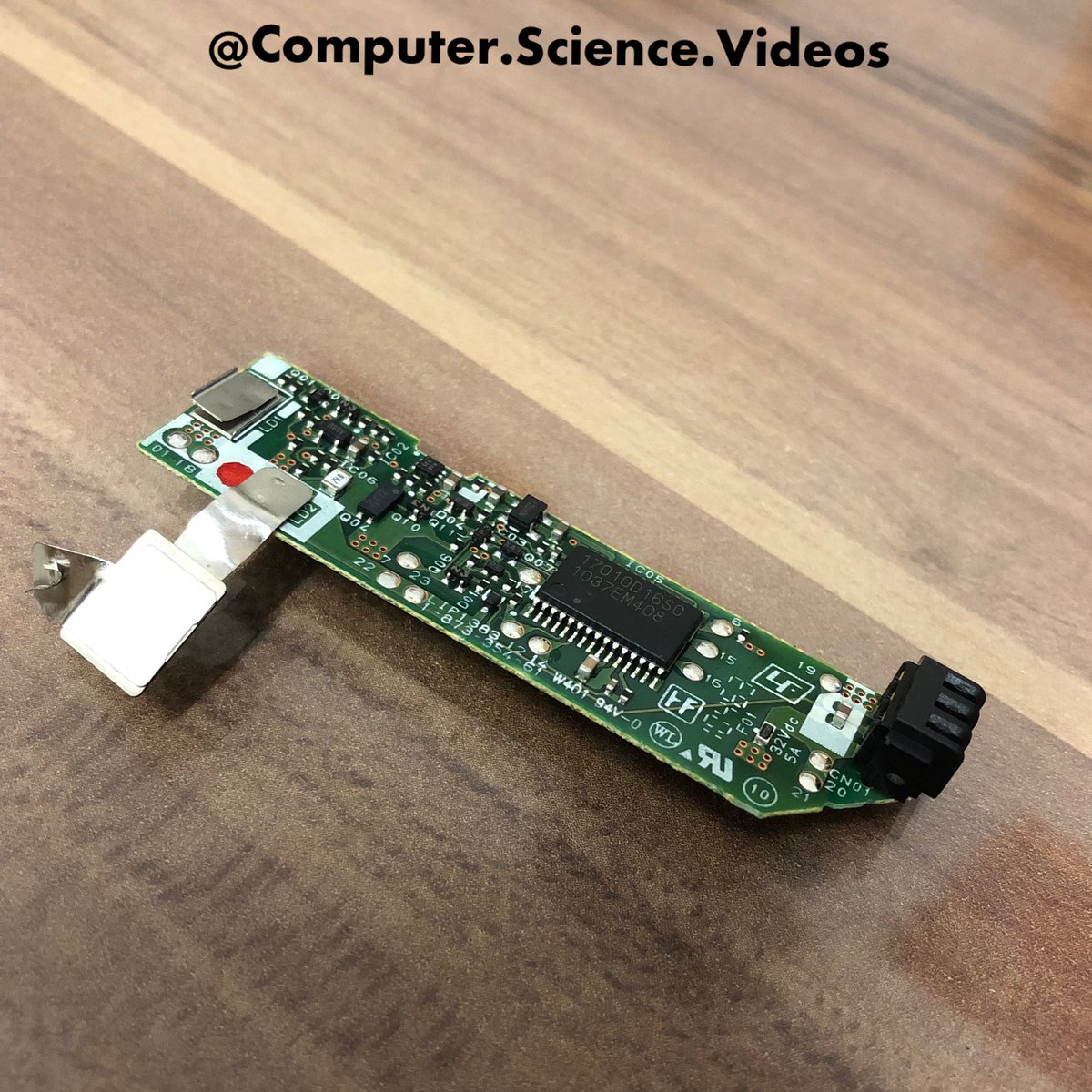
Powerful Technology works through circuit-boards! #ComputerScienceVideos #Circuitboard #ElectronicEngineering #ComputerScience2021 #SystemsAndControl
———
YouTube.com/c/ComputerScienc…
———
3

Did you see this #PhD #Fellowship in #ControlEngineering offered by Reissig Group at Bundeswehr University Munich? bit.ly/2k9Hvvi #PhDGermany #Mathematics #SystemsandControl #ComputerScience
4
6
Look at this open #PhD #Fellowship in #ControlEngineering offered by Reissig Group at Bundeswehr University Munich bit.ly/2k9Hvvi #PhDGermany #Mathematics #SystemsandControl #ComputerScience
6
7

Congratulations to all our A-Level students collecting their results today. A difficult year and some amazing results to show for your hard work! #ALevelResults #DandT #productdesign #systemsandcontrol #productdesigntextiles
1

16 Aug 2018
Congratulations to all our A-Level students collecting their results today. A difficult year and some amazing results to show for your hard work! #ALevelResults #DandT #productdesign #systemsandcontrol #productdesigntextiles
1
5

8 Jan 2018
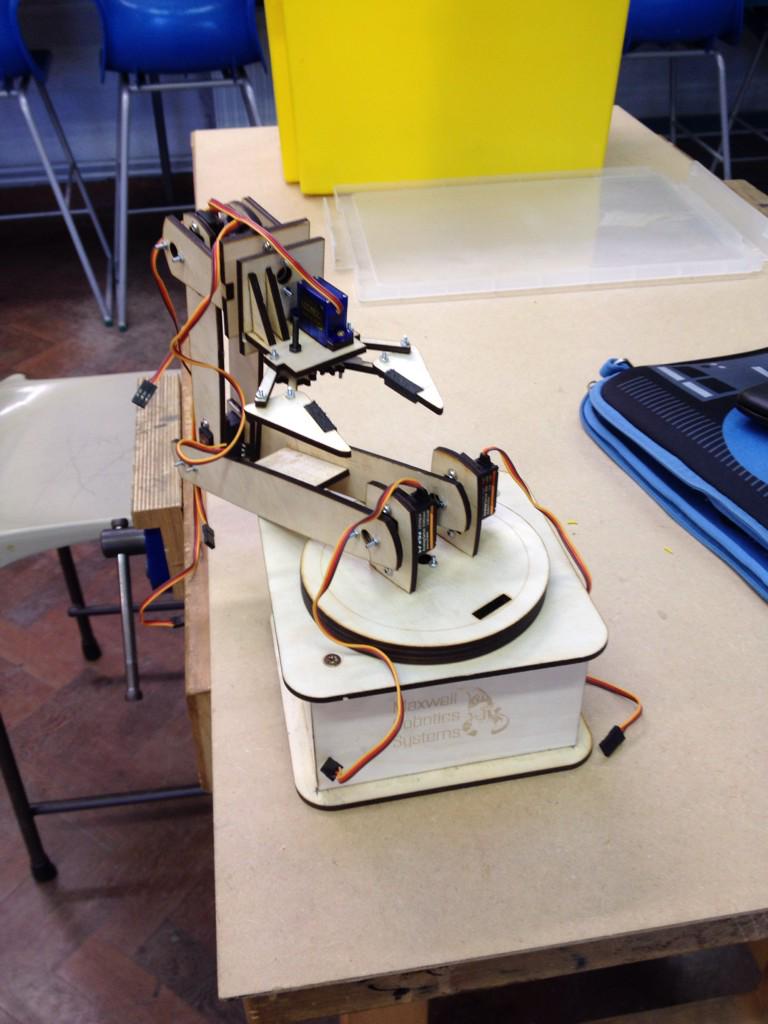
When the master becomes the apprentice. Everybody needs a mentor #olddognewtricks #designtechnology #uwcdesigneast #uwcsea_east #growthmindset #lifelinglearning #systemsandcontrol ift.tt/2me8VQg

1

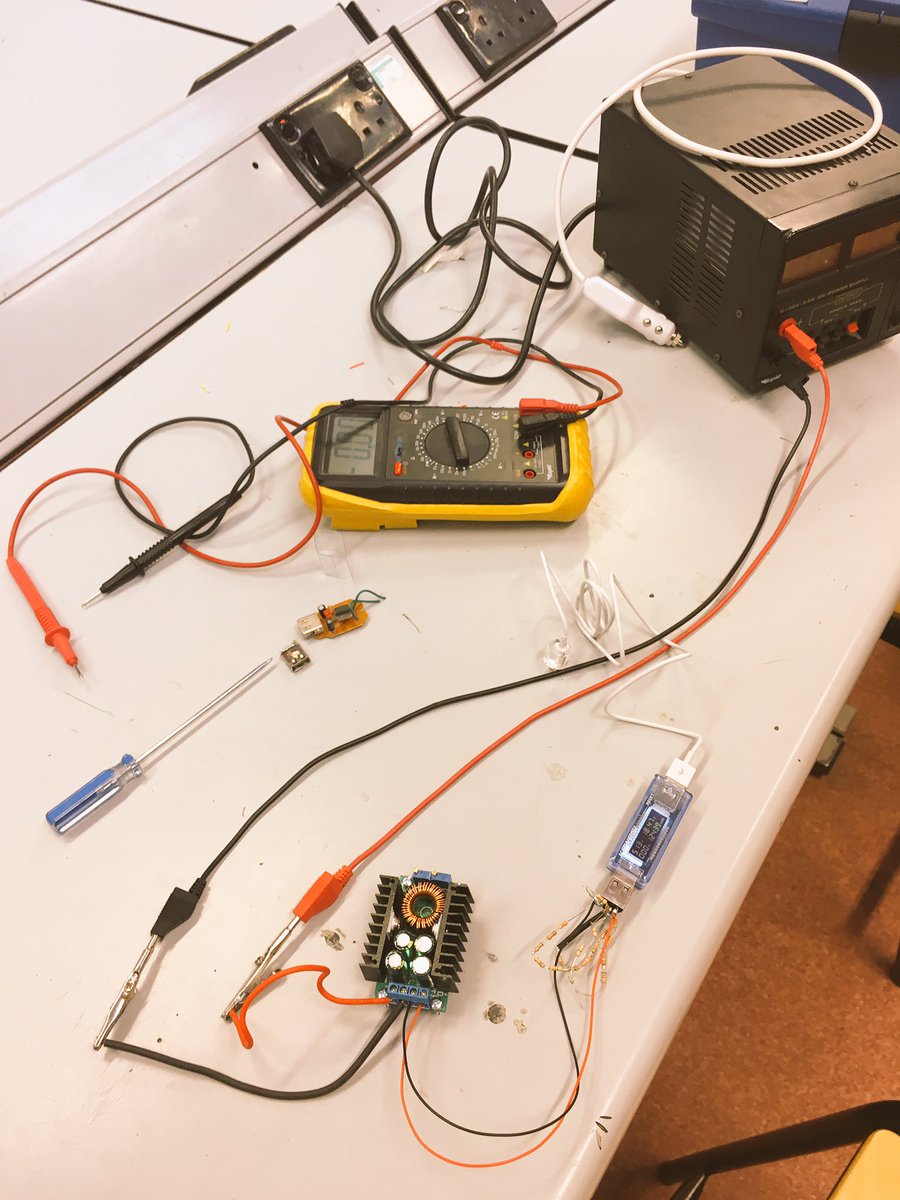
Arron O'Neill's high current iPhone charging circuitry testing. U6 A2 coursework #systemsandcontrol @BILLie_Group
1
1
30 Sep 2016
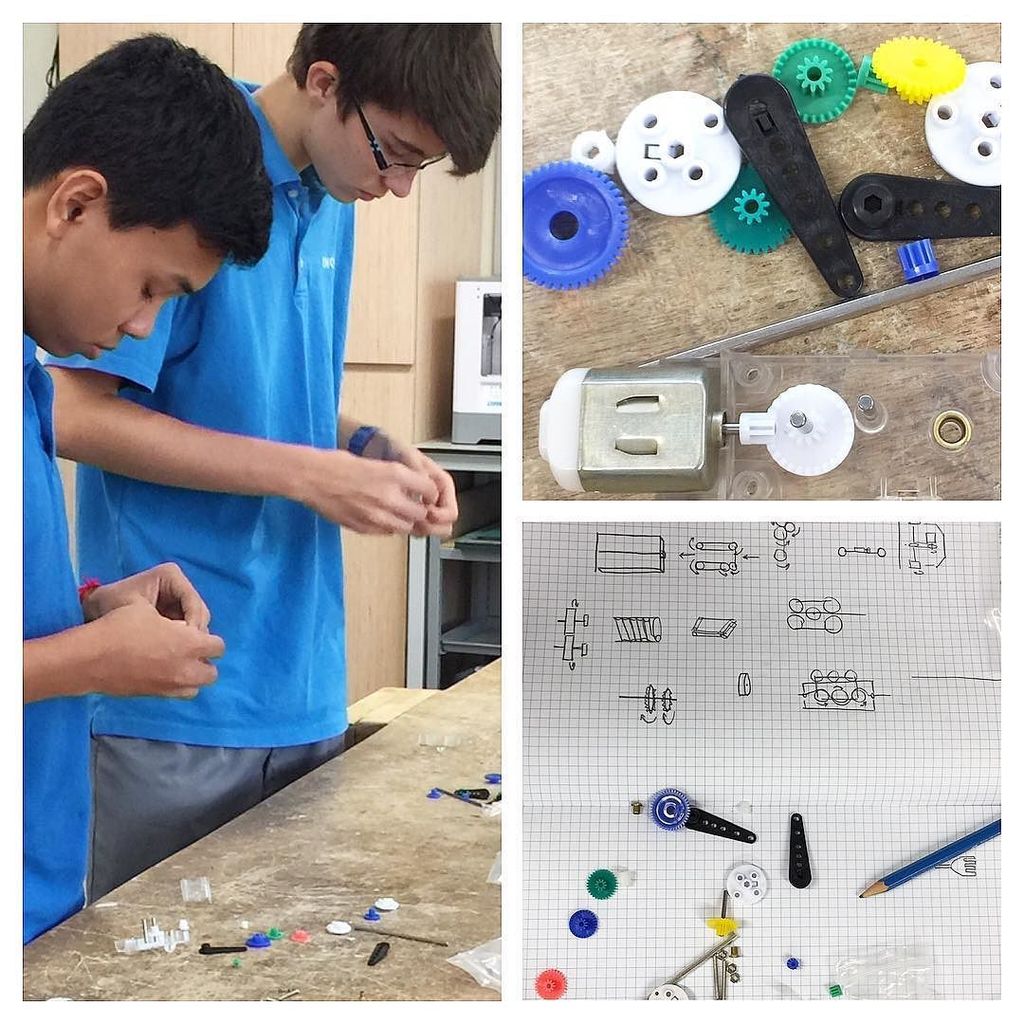
#systemsandcontrol students building a hill climber mechanism #uwcdesigneast #uwcsea_east … ift.tt/2di4u2d
1

13 Jan 2015
1
3