
@luxor / @HashrateIndex / @TenkiCloud. Software Engineer by trade, CEO in training. Poker fish and ProV1 Disrespecter #Bitcoin 🐤
Joined June 2011
- Tweets 9,535
- Following 1,039
- Followers 13,470
- Likes 16,121
1,029 Photos and videos











Pinned Tweet

27 Jul 2024
Trump: ‘I will remove all tax on tips’
Ok thanks but what about my bags
19
11
148
17,313
NickH retweeted

Jun 10
Here's a quick test we did: Opus 4.8 vs Fable 5
This is what Tenki Code Reviewer found:
Opus-written PR:
3 high-severity bugs across 22 files and 1,615 lines of code
Fable-written PR:
zero issues across 22 files and 1,134 lines of code
Same repository, same prompts.
Small sample, but this is worth paying attention to.
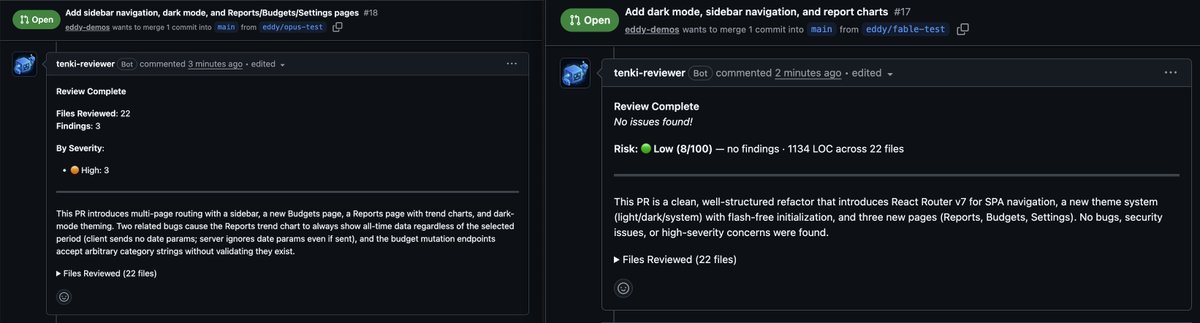
ALT Side-by-side GitHub PR reviews from Tenki Code Reviewer. Left: Opus-written PR with 3 high-severity findings across 22 files. Right: Fable 5-written PR showing 'No issues found' with a green low-risk score across 22 files and 1,134 lines of code.
1
3
13
1,601
NickH retweeted

Jun 9
Every day your Bitcoin sits on a BitVM bridge, you're making a bet. Here's why I won't bridge more than $500.
3
5
33
2,503
NickH retweeted

Your weekly hashrate weather forecast is in 😶🌫️
1
4
797
Jun 8
You: Need to implement loops
@TenkiCloud: Gives you a place to execute your loops
May 27

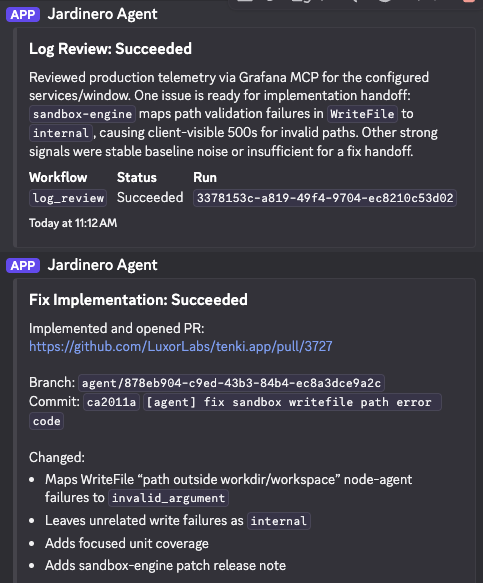
Building Jardinero: a control plane for autonomous engineering agents.
It's a TypeScript orchestrator living in a long-lived @TenkiCloud sandbox. Three workflows so far.
1) The Log Reviewer runs hourly and post-deploy. It sweeps staging and prod through the Grafana MCP, investigates anomalies, and writes a structured handoff: suspected root cause, reproduction steps, acceptance criteria, suggested tests, etc. The handoff is the only thing it produces. It never touches code.
2) The Implementator picks up that handoff. The orchestrator claims it (fingerprinted, idempotent, so two log reviews of the same incident cannot dispatch twice), spins up a fresh worker sandbox, hands the handoff to Codex inside it, and the agent opens the PR.
3) The PR Maintainer listens for review-comment events piped in from GitHub Actions. The orchestrator dedupes the event, dispatches an ephemeral worker sandbox with Codex inside, and the agent pushes fixes, replies to reviewers, and gets CI green.
Agents are stateless. The control plane is not. Every task gets a fresh microVM, no mutable state shared between runs. Persistence is a five-table SQLite file on the orchestrator's volume.
The orchestrator does not trust the worker. When the agent reports a PR URL, the orchestrator independently fetches it, checks the repo scope, the branch name, and an Agent-Run-Id commit trailer before marking the run successful.
Blast radius is contained by the repo, not the agent. Branch protection, required CI, and human reviewers are the safety net. The agent is unsupervised at the action boundary on purpose.
Cold-start is cheap because Tenki templates pre-bake the toolchain and volumes hold warm git mirrors. A worker spins up in ms, clones from cache, runs codex exec, opens the PR, then the microVM dies.
One orchestrator, N ephemeral workers, a durable queue, a Discord webhook.
2
4
423
NickH retweeted

Jun 8
update: joining @TenkiCloud as a swe
May 13

who's hiring me??? ^^
14
2
54
6,847
May 29
New life goal: Have Jamie Dimon talk shit about you on CNBC

Jamie Dimon, complaining about the Clarity Act and Coinbase CEO Brian Armstrong this AM: “He’s spending hundreds of millions of dollars in Washington in this thing.”
Maria: “He said he’s representing the whole —”
Dimon: “He’s full of shit.”
Maria: “…well.”
3
10
651
NickH retweeted

May 28
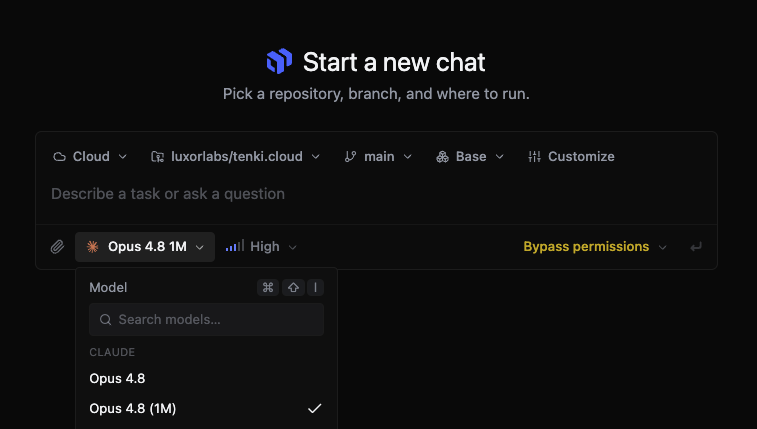
Opus 4.8 already available in Tenki Sandbox ADE
2
1
3
365
NickH retweeted

May 27
4CP season opens June 1st.
If your Texas mining site isn't managing coincident peaks, you're locking in avoidable transmission charges for the next 12 months.
A thread on what 4CP is and how to get ahead of it 🧵
1
4
7
877
May 24
I love the aura of a hydro build. Quiet enough to have a convo, but somehow you can still sense the power

2
13
941
May 21
Overheard investor lunch in Europe: "Alright, we'll circle up in September, enjoy your summer"
The European Summer is upon us
1
1
10
562
May 18
VCs in 2016: We don’t invest in hardware
VCs in 2026: We don’t invest in software
1
12
999
May 15
‘Alright he’s saved up a nice emergency fund. Good, now swallow that dish towel whole’
2
1
34
813
May 15
Can I buy an Emdash, Alex?
May 12

A single AI data center uses as much electricity as 100,000 households—and utility companies are passing the upgrade costs to you, not to the trillion-dollar tech giants.
I've opened an investigation. These companies need to pay their costs.
1
1
17
5,435
May 14
Officer, it's not the destination, it's the journey
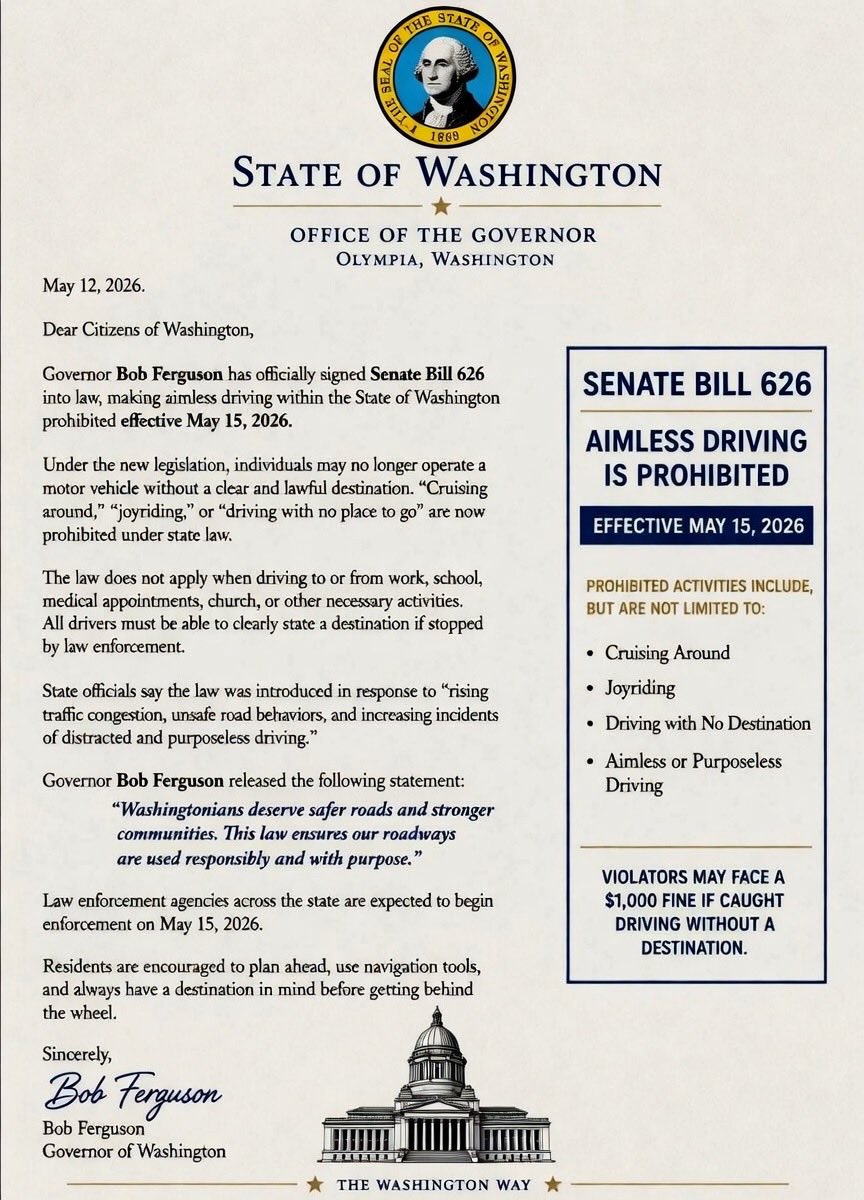
May 14

Just found this official decree from the Washington Governor’s Office…
They’ve officially banned aimless driving.
No more cruising. No more joyrides. No more “I’m just clearing my head, officer.”
You must have a lawful destination at all times or face a $1,000 fine.
Welcome to the People’s Republic of Washington, where even your Sunday drive needs prior approval.
Governor Ferguson has solved traffic congestion by making driving illegal unless you’re going somewhere productive.
Next up: banning “aimless walking,” “purposeless staring out the window,” and breathing without a five-year plan.
Washingtonians, start practicing your excuse scripts now:
“Yes officer, I am driving to acquire oat milk for my emotional support latte.”
This is peak 2026 energy.
Government: “We care about your safety!”
Also government: “But first, show me your destination on this here form, citizen.”
The only thing aimless now is common sense. Hopefully you got a chuckle. Now days I wouldn’t put anything past them.
#AimlessDrivingBanned #WashingtonWay #BigGovernmentEnergy #JustLetPeopleDrive
Community note
Washington State does not have a Senate Bill 626 (or any bill by that number) outlawing "aimless driving." Legislative records confirm. Washington State Legislature bill search → [app.leg.wa.gov](app.leg.wa.gov/billsummary?Bi…). This appears to be satire
417
May 14
He just bought GPUs @ 97% LTV. Now make the most profitable computer an altcoin miner that is barely produced. Great, now sell them out through Q4
2
2
536