
Joined February 2020
- Tweets 5,001
- Following 223
- Followers 1,740
- Likes 947
900 Photos and videos











とりあえず、足首モーターのcurrent limitをデフォルトの16Aから10Aに下げておいた。だいたい、ロックで出るエラーってgrid lockってエラーでover currentじゃないから意味ないかも。
2
160

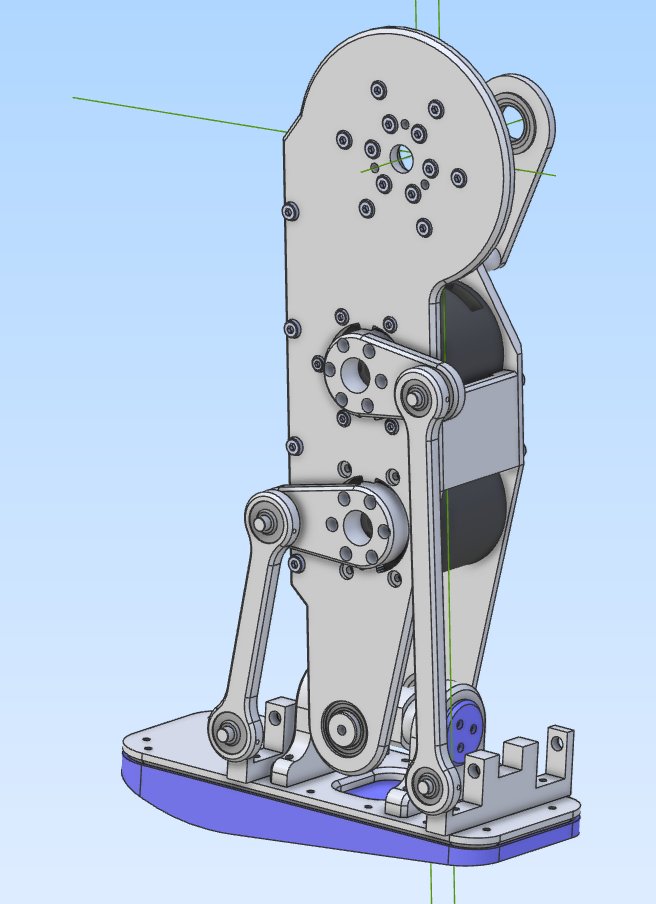
概念図。こんな感じか。
リンクに対する曲げ応力はあんまり変わらんかもな。
機構が外側に集中するのでしっかりがっつり作っても気にならない。内側がすっきりするのが〇
でも、なんかかっこよくないな。
3日で慣れるか。
2
20
746
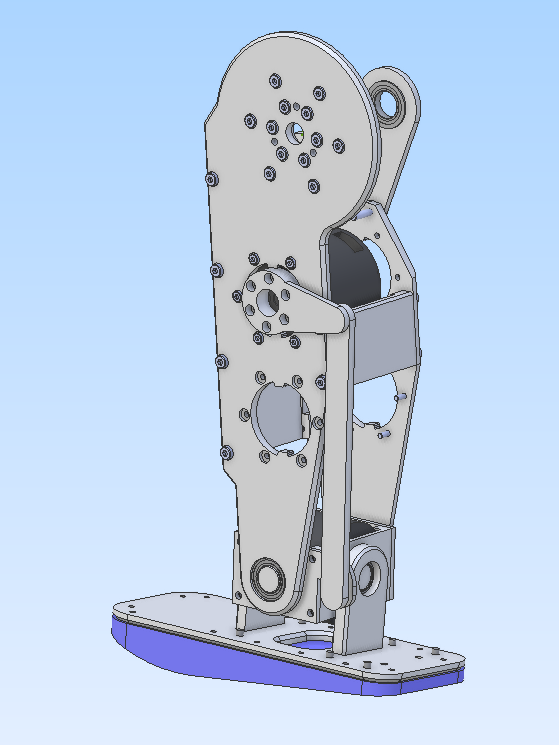
そうだ。下側のモーターも外側にして、リンクを横配置にすればロッドの捻りは抑えられる。改造量も球面軸受対応の範囲でできるぞ。
内外入れ替えられるように穴を空けておいたのが役に立つかも。
内側がスッキリするのも良い。
採用だな。描いてみよう。
1
17
549

Jun 13
あ、ダメだ〜
モーターがロックで落ちる前にリンクが曲がる。ちょっと太くしたくらいじゃ持たないな。多分外力では曲がらないからモーターに与える角度を完璧に管理すればいいはずだけど。ポリシーはいうこと聞いてくれるのか。
昨日到着したリンク、もう曲がった。
球面軸受の出番だな。
2
1
18
988
Jun 11
出版社は現状にあぐらをかいてロビー活動を怠った。IT企業がそこに潜り込んで利権を得たって事かな。栄枯盛衰の図
Jun 10

日本人をアホにするためにあえてやってるように見えてきた
デジタル教科書は成績下がると実証されて海外ではもう撤退し始めてる
1
316
Jun 11
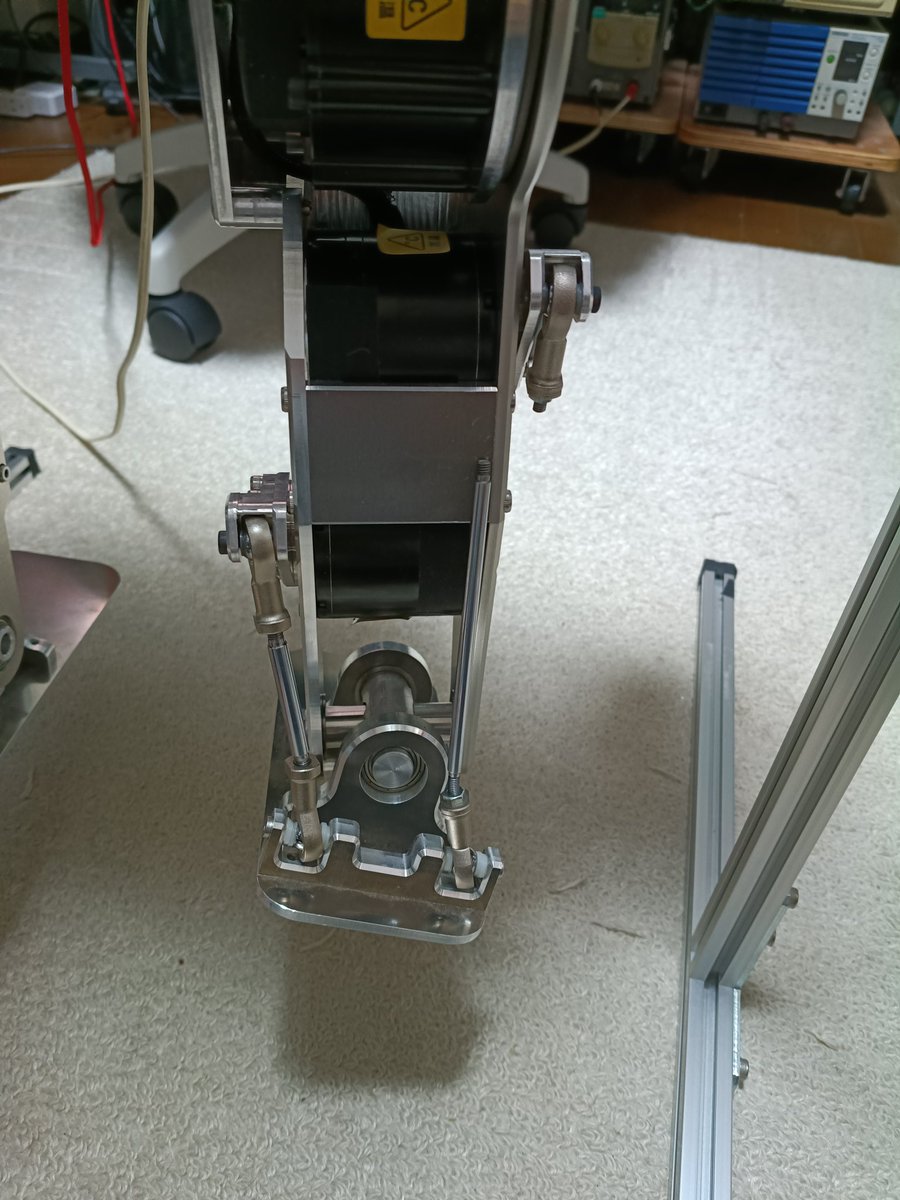
足首IKのデバッグの様子
手首のひねりを入力デバイスにして足首をグリグリ。
モーターのエラーハンドリングがザルで苦労した。ここ作り込まないとあとで困るところだ。
DKのデバッグまでできなかったけど、IK側のバグを見つけたからもう大丈夫じゃないかな。
#MFTokyo2026
3
17
991
Jun 11
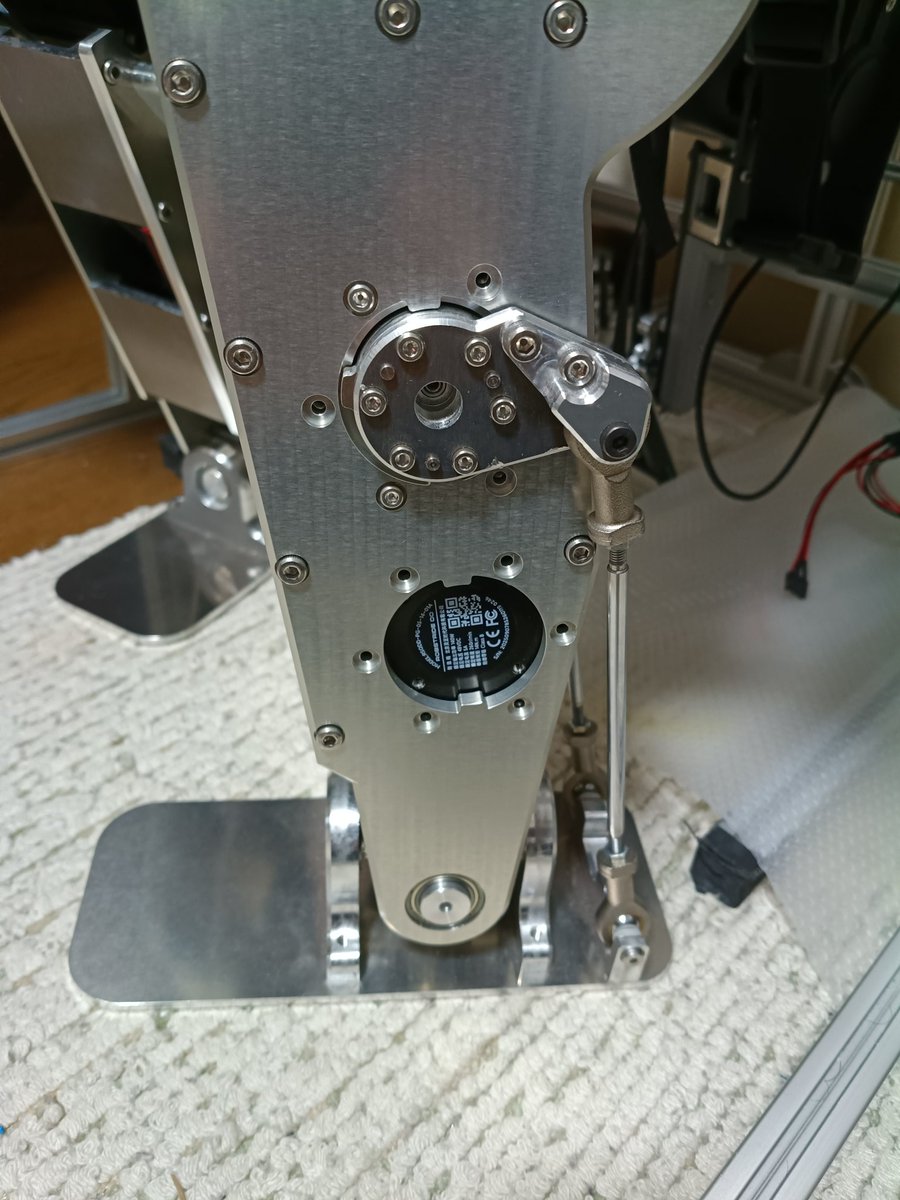
球面軸受。
今手配している少し太いリンクでダメならこれを使う。
元々これを使いたかったんだけど、なんて名前なのか分からなくて見つけられなかった。これ使うとリンクは頑丈になるけど足首周りは少しゴツくなる。
11
290
Jun 10
右腕データを左腕に転写して動きのテスト。ケーブルが1カ所不良らしくすぐ切断してしまう。コネクタかなぁ。
あと、モーターひとつダウンしたらシステムダウンしてしまうのはどうなんだろ。できるだけ速やかに停止くらいにできないかな。
3
5
62
4,627
Jun 10
トルクをグイーンと入れるのはこんな感じでいいかな。
いつもなら源爺位置からスイーンと移動させるけど今回はこれで。
左足がブラブラなのが痛ましい。
1
7
265
Jun 11
いまの悩みは足首関節のヤコビでnanを吐くところ。
足首のリンクはIKは簡単だけどDKは結構ムズいのでDKはヤコビを使って解く。
そのヤコビがnanを吐いちゃう。
やっと検証の舞台が整ったので今夜はそれに取りかかる。ソース見た感じだと問題なさそうなんだけどなぁ。
3
26
2,662
Jun 11
あ、貼り付ける画像間違えた。まぁいいか。
こないだは、デバッグ目的でとりあえず動かしたら、バキッと行った。どんな値が入力されたかも分からない。残念である。
1
329
Jun 11
そういえばいつの間にかアクチュエータの1つの設定が書き変わっていた。恐らく、その、バキッと行った時だと思うんだが、デフォルト設定になったって事かな。
アクチュエータの設定環境もまとめておかないといかんな。
3
264
Jun 10
しまった!
#MFTokyo2026
Jun 10

右腕データを左腕に転写して動きのテスト。ケーブルが1カ所不良らしくすぐ切断してしまう。コネクタかなぁ。
あと、モーターひとつダウンしたらシステムダウンしてしまうのはどうなんだろ。できるだけ速やかに停止くらいにできないかな。
2
381