
PhD student at Dyson Robotics Lab @ Imperial College London
Joined May 2020
- Tweets 32
- Following 395
- Followers 477
- Likes 985
10 Photos and videos








Pinned Tweet

18 Dec 2025
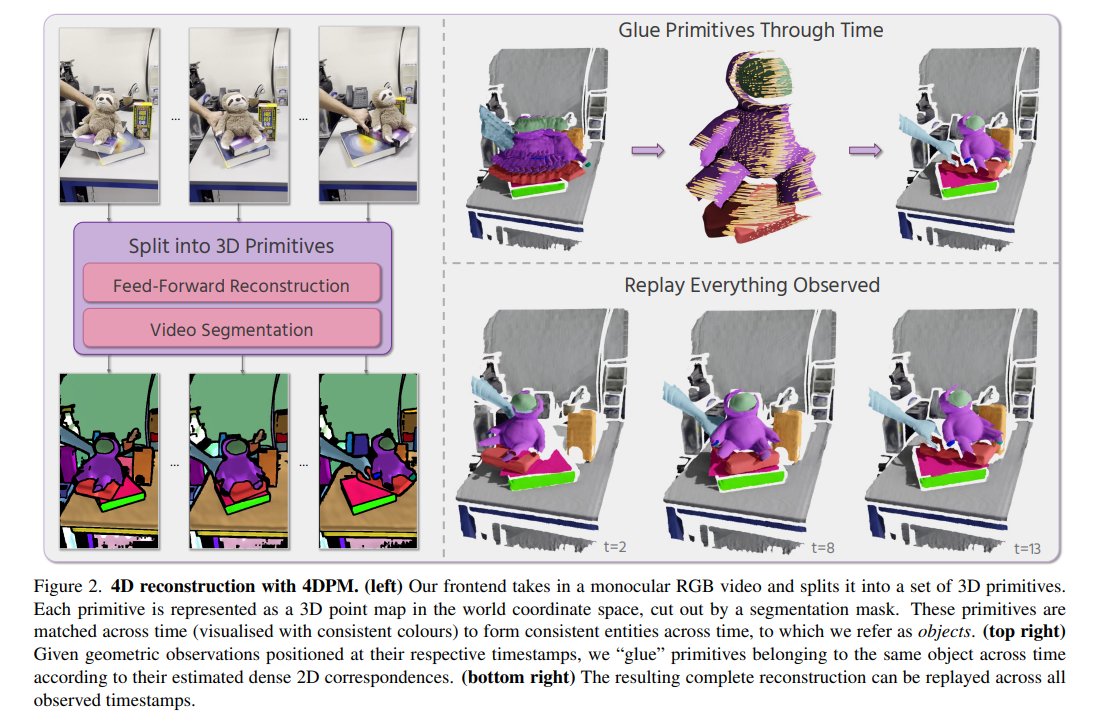
Introducing 4D Primitive-Mâché (4DPM), a new method for replayable 4D reconstruction from monocular videos.
We split dynamic scenes into 3D primitives and recover their motion. 4DPM can infer object positions even after they leave view.
Joint work with @marwan_ptr @AjdDavison
5
24
176
32,664
Kirill Mazur retweeted

Jun 6
Wanna see a real-time demo of KV-Tracker?
Stop by in ExHall F today 11:45 - 13:45!
#CVPR2026
2
12
55
4,735
Jun 5
How to build complete 4D reconstructions from videos? Swing by 4DPM oral presentation today: Mile High Ballroom 3A - 4A, 13:00
#CVPR2026
3
8
108
10,403
Apr 16
4DPM got selected for an oral presentation at #CVPR2026 🤠
18 Dec 2025

Introducing 4D Primitive-Mâché (4DPM), a new method for replayable 4D reconstruction from monocular videos.
We split dynamic scenes into 3D primitives and recover their motion. 4DPM can infer object positions even after they leave view.
Joint work with @marwan_ptr @AjdDavison
3
5
65
6,952
Feb 23
accepted to #CVPR2026 😎
18 Dec 2025
Introducing 4D Primitive-Mâché (4DPM), a new method for replayable 4D reconstruction from monocular videos.
We split dynamic scenes into 3D primitives and recover their motion. 4DPM can infer object positions even after they leave view.
Joint work with @marwan_ptr @AjdDavison
1
6
86
7,062
Kirill Mazur retweeted

20 Dec 2025
4D Primitive-Mâché: Glueing Primitives for Persistent 4D Scene Reconstruction
@makezur, @marwan_ptr, @AjdDavison
tl;dr: improve SuperPrimitive; scenes->3D primitives->sparse per-primitive SE(3) poses ( 2D correspondences)->per-pixel motion fields
arxiv.org/abs/2512.16564

7
33
1,913
Kirill Mazur retweeted
19 Dec 2025
How can we run reconstruction models like π³ and Depth Anything 3 in real-time?
We present KV-Tracker, a training-free approach, for real-time tracking of scenes and objects. Achieving up to 30 FPS!
With @alzugarayign, @makezur, @XinKong_IC and @AjdDavison
10
96
704
65,394
18 Dec 2025
Introducing 4D Primitive-Mâché (4DPM), a new method for replayable 4D reconstruction from monocular videos.
We split dynamic scenes into 3D primitives and recover their motion. 4DPM can infer object positions even after they leave view.
Joint work with @marwan_ptr @AjdDavison
5
24
176
32,664
18 Dec 2025
4DPM handles multiple moving entities with distinct trajectories.
The result is a complete, replayable 4D reconstruction of all observed scene elements at every timestamp.
1
1
5
850
18 Dec 2025
Our method cuts 3D primitives out of the outputs of a feed-forward reconstruction model (π³) and then glues them across time.
Each primitive’s motion is represented compactly as a single SE(3) pose, inferred from estimated 2D correspondences via an optimisation pipeline.
6
602
Kirill Mazur retweeted

16 Dec 2024
Introducing MASt3R-SLAM, the first real-time monocular dense SLAM with MASt3R as a foundation.
Easy to use like DUSt3R/MASt3R, from an uncalibrated RGB video it recovers accurate, globally consistent poses & a dense map.
With @eric_dexheimer*, @AjdDavison (*Equal Contribution)
42
253
1,434
203,565
19 Jun 2024
Come by our poster this afternoon! 𝟭𝟳:𝟭𝟱 𝘁𝗼 𝟭𝟴:𝟰𝟱, 𝗔𝗿𝗰𝗵 𝟰𝗔-𝗘
14 Jun 2024
SuperPrimitives will be presented at #CVPR next week (Wednesday), along with a 𝗿𝗲𝗮𝗹-𝘁𝗶𝗺𝗲 𝗱𝗲𝗺𝗼 on Friday!
Our new representation enables dense monocular 3D reconstruction in real-time. No poses required!
Project page: makezur.github.io/SuperPrimi…
3
9
50
5,383
21 Jun 2024
Demo tomorrow!
x.com/makezur/status/1803471…
19 Jun 2024
Come by our poster this afternoon! 𝟭𝟳:𝟭𝟱 𝘁𝗼 𝟭𝟴:𝟰𝟱, 𝗔𝗿𝗰𝗵 𝟰𝗔-𝗘
1
310
21 Jun 2024
Curious how DSINE surface normals can be converted into full 3D geometry?
Visit our demo of 𝗦𝘂𝗽𝗲𝗿𝗣𝗿𝗶𝗺𝗶𝘁𝗶𝘃𝗲-based real-time 3D reconstruction tomorrow (Friday)! A demo is worth a thousand pictures 🙂
Demo: 10:30 to 18:45, Arch CDE #9
#CVPR #CVPR2024
14 Jun 2024
SuperPrimitives will be presented at #CVPR next week (Wednesday), along with a 𝗿𝗲𝗮𝗹-𝘁𝗶𝗺𝗲 𝗱𝗲𝗺𝗼 on Friday!
Our new representation enables dense monocular 3D reconstruction in real-time. No poses required!
Project page: makezur.github.io/SuperPrimi…
1
14
1,930
14 Jun 2024
SuperPrimitives will be presented at #CVPR next week (Wednesday), along with a 𝗿𝗲𝗮𝗹-𝘁𝗶𝗺𝗲 𝗱𝗲𝗺𝗼 on Friday!
Our new representation enables dense monocular 3D reconstruction in real-time. No poses required!
Project page: makezur.github.io/SuperPrimi…
3
42
208
30,797
Kirill Mazur retweeted

3 Apr 2024
How can we infer 3D-consistent poses and dense geometry in real-time given only RGB images?
𝗖𝗢𝗠𝗢 decodes dense geometry from a compact and optimizable set of 3D anchor points to enforce 3D consistency.
Project page: edexheim.github.io/como/
Work with @AjdDavison
1/n
3
54
265
41,785
22 Mar 2024
Code release for SuperPrimitives, and it comes with an interactive GUI! #CVPR2024
github.com/makezur/super_pri…
SuperPrimitive is a new 3D representation which enables solving many 3D tasks at the level of image segments.
1
37
169
22,974