
We work with forward looking organizations to build their robot labor force of tomorrow. Get in touch: menlo.ai/talk
Joined May 2024
- Tweets 724
- Following 349
- Followers 4,798
- Likes 1,440
113 Photos and videos














Menlo Research retweeted

Jun 12
It's fun to meet in person other passionate robot lovers we should do this more often @menloresearch @asimovinc thanks for hosting the event let's do another one!



1
10
347
Menlo Research retweeted

Jun 11
Teaching a humanoid to stand, balance, and walk.
The robot in the video is Asimov 1, our open-source reference hardware. Anyone can build it, customize it, and use it.
Every day we train new policies and test them on Asimov 1. Each run gets us a little closer to clean standing, balance, and walking. We're also testing driving it with other devices, like a Bluetooth gamepad.
This is what the early work looks like. Slow, hands-on, one run at a time.
Read the full write-up below for our learnings.

3
13
48
5,274
Menlo Research retweeted

Jun 11
Probably the best fringe event of London Tech Week was this robotics meet up by @selim___1903 and the good folks at @menloresearch 🦾
It was an honor to be 𝐭𝐡𝐞 𝐨𝐧𝐥𝐲 𝐰𝐨𝐦𝐚𝐧 in the room full of some very cool robotics founders.
I also showcased some hardware:
⚙️a QDD actuator from @saturnroboticsx via @parthingle_x
💚the second brain device from @neosapienHQ via @imDhananjay
Thank you @dominiconorton for inviting me over!
3
3
25
1,655

Jun 11
We're making some updates to our careers page. Applications will be back open very soon, stay tuned.
1
9
766
Menlo Research retweeted
Jun 10
Keep going.
Jun 10
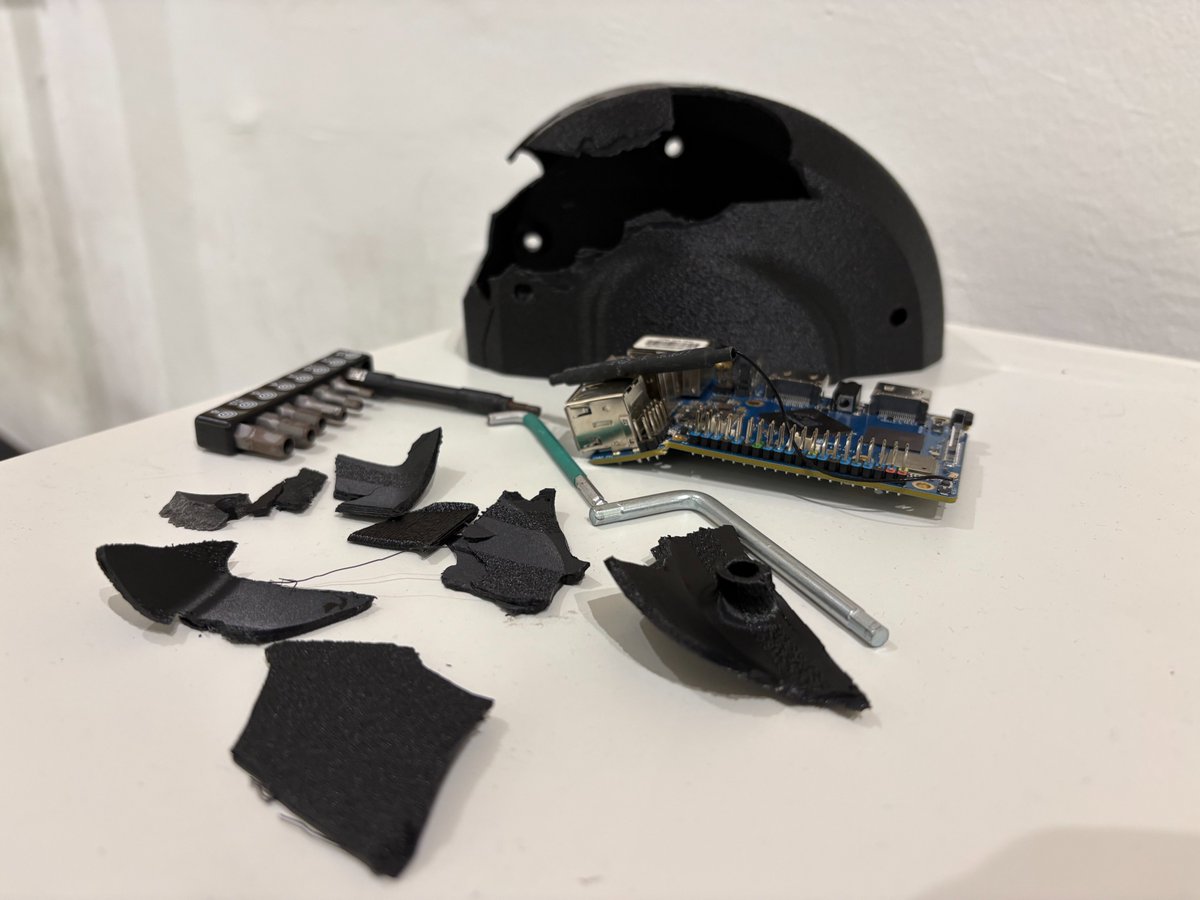
Nothing tests a robot like dropping it on its head before a demo.
4 hours before this demo, an operator error did exactly that. The robot fell face-first and the SBC snapped off.
We fixed it in 2 hours, with most of that time spent finding a replacement.
It was an unscheduled test of how repairable Asimov 1 is.
It passed.
2
1
60
3,949
Menlo Research retweeted
Jun 11
Mando started his humanoid robot journey with K-Scale's K-Bot. Now he's continuing it with Asimov 1.
5
27
1,556
Jun 10
"Anyone can bring their own intelligence model into the bots."

@menloresearch demo-ing their open source humanoids. Anyone can bring their own intelligence model into the bots.
1
8
733
Menlo Research retweeted
Jun 10
Nothing tests a robot like dropping it on its head before a demo.
4 hours before this demo, an operator error did exactly that. The robot fell face-first and the SBC snapped off.
We fixed it in 2 hours, with most of that time spent finding a replacement.
It was an unscheduled test of how repairable Asimov 1 is.
It passed.
@menloresearch demo-ing their open source humanoids. Anyone can bring their own intelligence model into the bots.
1
6
49
9,220

@menloresearch demo-ing their open source humanoids. Anyone can bring their own intelligence model into the bots.
3
14
4,415
Jun 10
Build your own humanoid robot: docs.menlo.ai/asimov/1
Jun 10
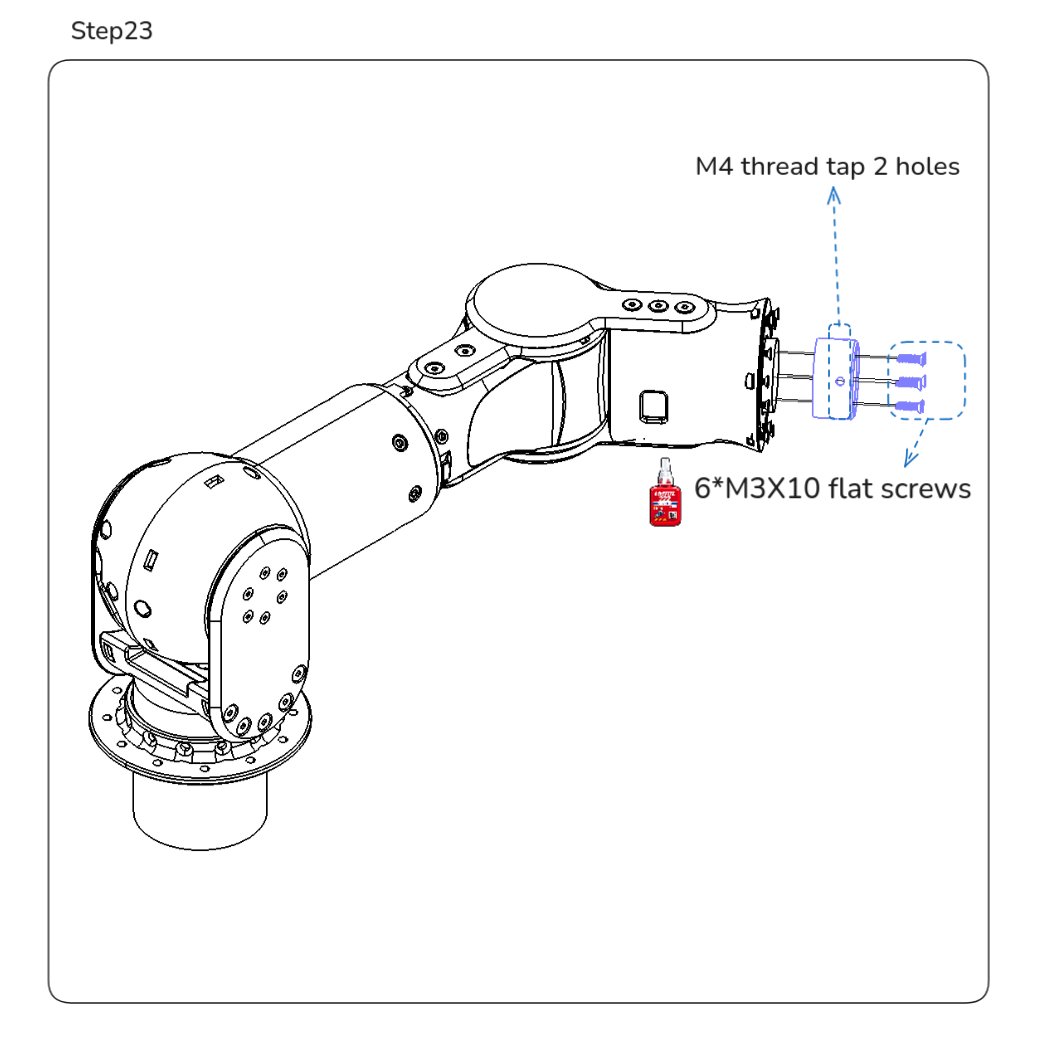
The guide for building a humanoid from scratch keeps growing. Assembly steps for the torso, pelvis, arms, legs, and hands are now in, plus how to connect them.


1
1
22
1,302
Menlo Research retweeted
Jun 10
A crane takes up too much room, so we made something smaller. Asimov 1 is sitting on it.



1
4
55
7,144
Jun 9
A quick heads up before tonight.
We usually get around 300 sign-ups for Demo Night. This month it's 635. That's more than double, so seating will be tight and we've set up extra space.
The main presentations are in the same room as usual. Seating fills up fast, so come early if you want a seat. Standing room is available too, but expect that to fill as well.
We've also opened a spillover space on the same floor, Level 7, right outside the library. There are no presentations there, but we'll have two robots to see up close, and it's a good spot to mingle with other attendees and the speakers.
So wherever you end up, there's plenty to see tonight.
See you soon. This one's going to be fun 🧡
luma.com/sf2j557g
10
3,000
Menlo Research retweeted
Jun 8
We cut Asimov's wiring down to a single connector.
The power and communication boards are now one stack. Power and data run through one XT30(2 2). Motor power toggles in software through a solid state relay.
So now we bench-test a single limb with one power cable.


6
13
199
12,388
Menlo Research retweeted
Jun 4
We're meeting in San Francisco, Austin and London next. Check the event calendar to RSVP: luma.com/calendar/cal-spwVOh…
Jun 4

Great hanging out, Palo Alto 🧡
Planned a coffee meetup, and it turned into a picnic. Cool seeing so many people interested in humanoids show up.
See you around.

2
13
1,870
Jun 4
Great hanging out, Palo Alto 🧡
Planned a coffee meetup, and it turned into a picnic. Cool seeing so many people interested in humanoids show up.
See you around.
1
18
3,531
Jun 3
We're hosting an online community talk this Friday 11 AM SGT (Thursday 8 PM PT).
Get an early look at what we're shipping. We'll show what's in progress, what just shipped, and what's coming.
Bring questions, we'll answer them live. luma.com/r8540uxv
2
279