
3D Print & Scan Enthusiast with a love for open-source
Joined November 2018
- Tweets 206
- Following 95
- Followers 509
- Likes 343
79 Photos and videos
















Jun 13
I just updated the 3D Scan Benchmark Repo on Github to include the 15cm ScanBench. I also automated most of the pipeline, so it is much easier to add a new scan now.
more details: github.com/OpenScanEu/OpenSc…
39
Jun 2
OpenScan is in Brussels this week, exhibiting at the Summer Reception of the State Government of Saxony-Anhalt – showcasing open-source 3D scanning
Open hardware belongs in the conversation on digital sovereignty.
1
1
37
May 21
We’re planning to bring OpenScan to the Open Hardware Summit 2026 in Berlin May 23–24, 2026
#OpenHardware #OpenSource #3DScanning #OpenScan #OHS2026 #Berlin #DigitalFabrication
1
2
61
May 6
Bad exposure = bad scans. The fix takes 5 seconds if you know how to read the histogram. New blog post up on openscan.blog. We cover what to look for, why ETTR works, and how to dial it in with the OpenScan3 firmware.
openscan.eu/blogs/news/under…
1
83
Apr 28
Not the fun part of this project: prices on parts and kits go up on May 7. We've kept them stable since 2022, but component costs, shipping, and tariffs have moved enough that we can't hold the line any longer.
1
55
Apr 17
OpenScan3 Beta
- 2–3× faster captures (0.7s per image with IMX519)
- 64MP Arducam Hawkeye support
- On-device focus stacking
- QR code WiFi setup
-Setup wizard with blackshield, Mini v2 & Midi presets
- Live photogrammetry feature preview --> openscan.blog
1
9
78
5,598
Apr 1
Introducing OpenScan Halo: Planet-scale photogrammetry
Meet OpenScan Halo: a photogrammetry rig made of multiple synchronized belts around the Earth, designed to deliver 100% scan coverage, 24/7.
More details: halo.openscan.eu/
1
149
OpenScan retweeted

Mar 3
OpenScan - 3D scanning for the masses
blog.adafruit.com/2026/03/03…

2
42
297
13,043
OpenScan retweeted

Check out this video on how to scan minis with THREE - youtube.com/watch?v=N-6LQryr…
2
3
231
OpenScan retweeted

28 Dec 2025
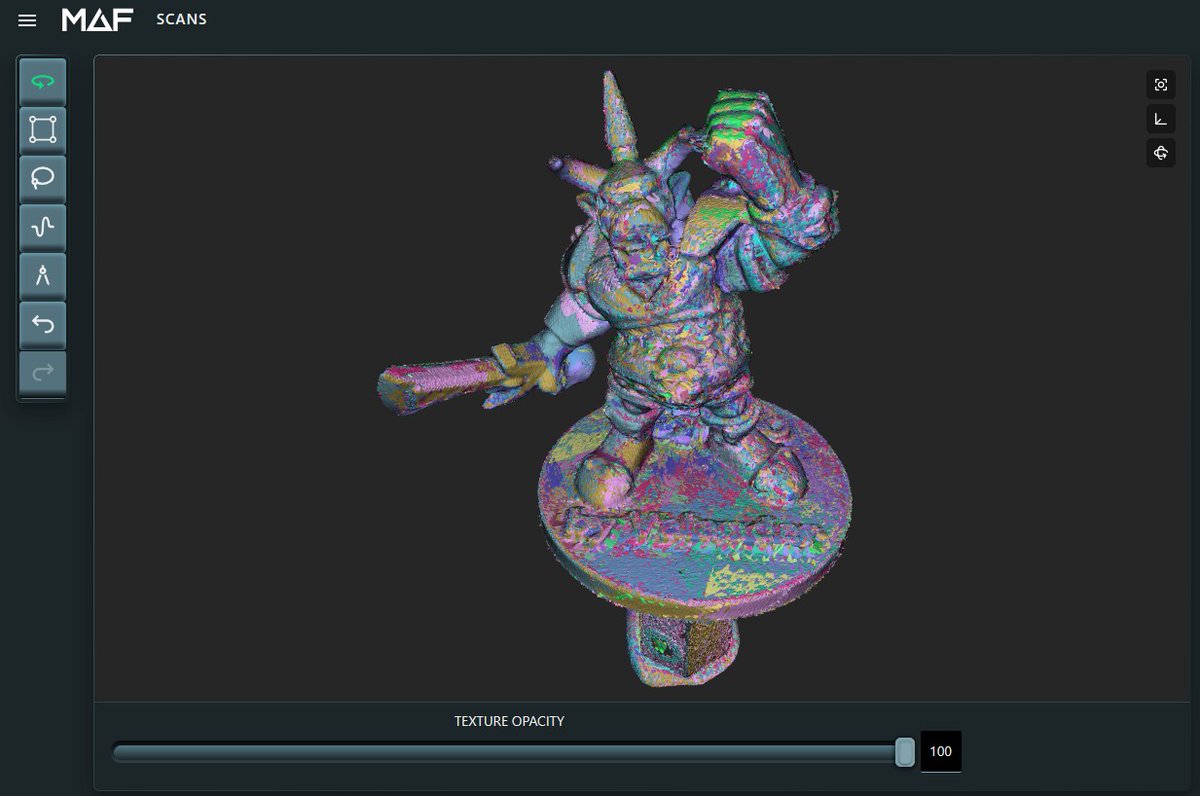
Got my hands on MAF3 structured light scanner. Scanning result pretty much impressive and scanner extremly easy to use! @openscan_eu @MatterandForm #3d #openscanbenchy #3dscan



2
1
2
218
OpenScan retweeted

17 Oct 2025
・x・)
ど~しても3Dスキャナが安価に欲しい…
ってんで、openscanってのに興味を持つなど
openscan.eu/pages/openscan-c…
1
2
204
20 Sep 2025
3D Scanning insects with the OpenScan Mini —> find out more on openscan.eu and on github
2
3
482
31 Aug 2025
A quick look at how to use the OpenScan Mini 3D scanner:With some basic processing, you can create a highly detailed digital copy (see OpenScan on YouTube).
In this example, a compressor part is scanned and converted into an accurate 3D model. #3dscan #3dscanner #diy
7
325
27 May 2025
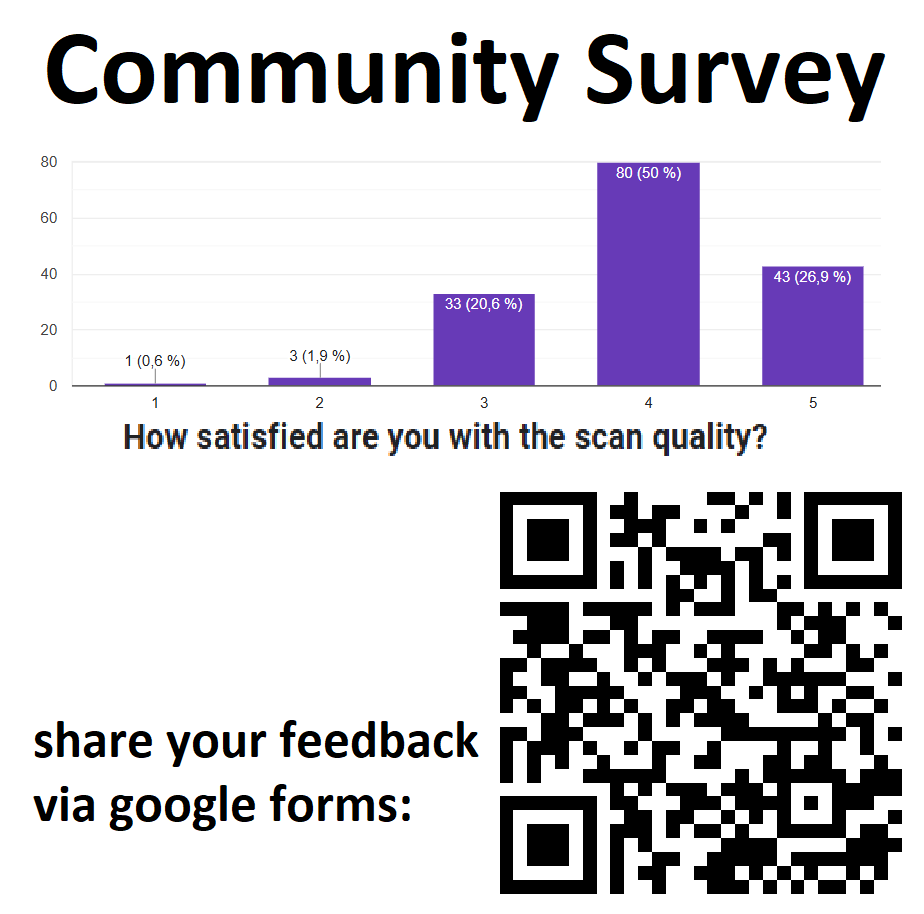
As we are working on major updates on the firmware, we would like to ask our community for help. Please join our survey (2-3mins) and 15 questions, and don't hold back with your ideas and criticism :)
forms.gle/ehRYGHSqmjjufhtw7
#openscan #opensource #community #3d #3dscanning
2
185
OpenScan retweeted

3 Apr 2025
Answer in Depth maps.
It worth to understand that absolutely all processing up to depth maps (including them) happen in Image level.
Everything is images.
Multiply View stereo use a pair of images.
Using well known algo such stereo pair estimate Disparity images.
Disparity images has same resolution as original images. Technically you can do upscale here, but sure no one do that. Some genius can downscale to speedup and filter, but hope no one do that.
Disparity after that processing to depth map images. And again, depth maps has exactly the same resolution or lower. They can be lower because at this moment images should be encoded in float or double. That might increase memory use. (Disparity don’t need high bit depth).
Next is “depth fusion”:
Single stereo pair can’t solve discontinuities. And a lot of areas in raw depth map after disparity has NaNs or zeroes.
And to repair/recover such areas depth information from nearest cameras (or from other stereo pairs) can be used.
At the end we again has Depth Maps that storing as usual images (even if they are PLY files).
Now depend on algo, such depth maps can be blended to a single mega-point cloud. (Depth map store exact distances from sensor to point in 3D scene). And meshed using some poisson meshing algo. Or use more advanced methods without mega-point cloud.
In any case that’s a big difference, you have 2500x2000 points per camera or 5000x4000 point per camera.
Old methods that use depth -> dense point cloud -> mesh together with low resolution images and bad alignment can fuse all to some smooth blob.
Modern methods and mesh from depth together with a higher precise alignment can give a profit.
Thin details, or thin surfaces, when you have original resolution due to reprojection errors from SFM can be just blended to a single value.
2x resolution can give 4x more samples per camera and higher chance that will deserve own vertex in a mesh.
Is this a universal solution?
No. Using too low res cameras or too high res cameras, and upscale images will not give you much profit.
Upscale 41mpx Sony A7RIII images only add processing time to facial scans with minimal improvements in reconstructed details that also mixed with amplified noise.
Using Ai upscale can be even more destructive as such methods often can distort original details, but “dreamed” details from multiply images become a noise due to their inconsistency across cameras.
And if you have alignment issues, upscale images more likely don’t improve a final mesh.
2 Apr 2025

Maybe some #photogrammetry expert can explain to me, why simple upscaling significantly improves the reconstruction result on highest presets in various programs @_3Dflow_ @RealityCapture_
1
4
25
2,610
2 Apr 2025
Maybe some #photogrammetry expert can explain to me, why simple upscaling significantly improves the reconstruction result on highest presets in various programs @_3Dflow_ @RealityCapture_
4
2
24
4,572
26 Mar 2025
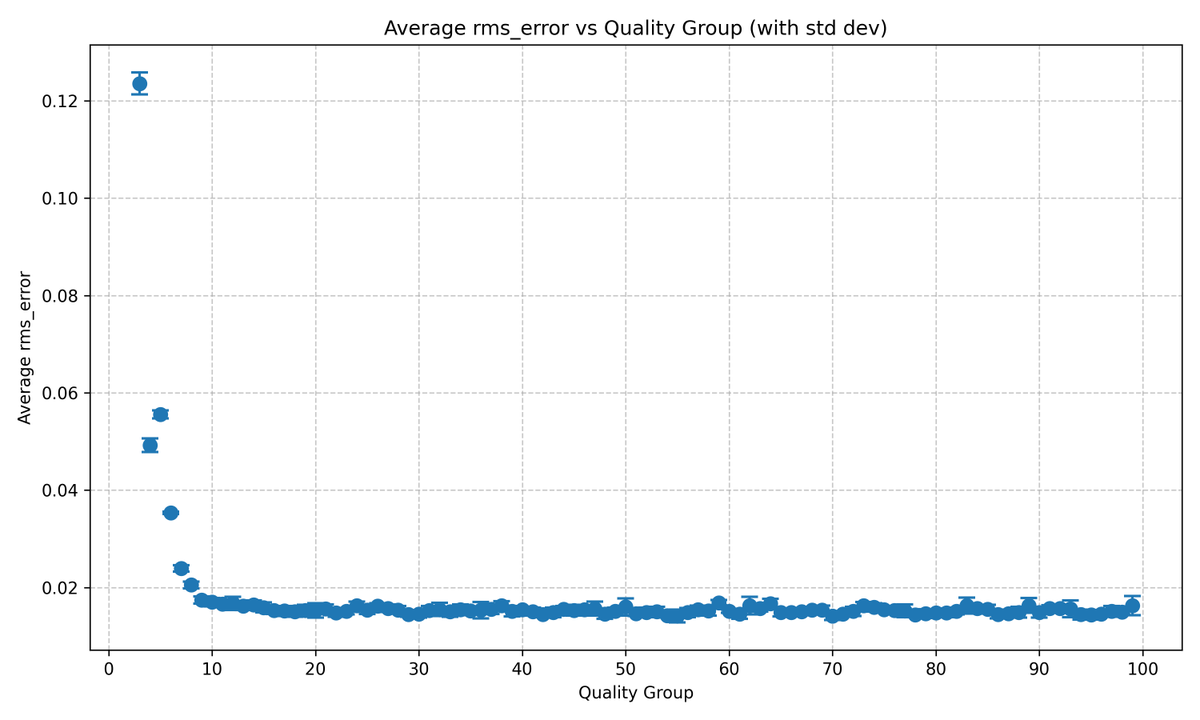
Optimizing Photogrammetry: How Many Photos Do You Really Need? Read more at openscan.blog.
Let me know your thoughts—I’m a bit out of my depth here.
3
5
496
21 Mar 2025
Using jpg compression as metric for feature density at a fraction of the compute-cost. A great tool for photogrammetry beginners now available in your browser on openscan.eu/pages/openscancl…
1
1
147
20 Mar 2025
Testing how jpg-compression influences mesh quality in photogrammetry. There seems to be no significant change to well-below 20% jpg quality! Read more on openscan.blog #photogrammetry #3d
8
252
4 Mar 2025
BETA Openscan Cloud - Process photogrammetry from anywhere without any App needed ;)
7
195