
Joined April 2026
- Tweets 42
- Following 16
- Followers 314
- Likes 24
14 Photos and videos













Pinned Tweet

Apr 28
Rehabilitation is broken.
Patients drop out.
Progress isn’t measurable.
Outcomes aren’t trusted.
We’re fixing this with AI agents.
19
2
58
13,717
Jun 9
ARMIC is learning to understand movement.
Today we’re testing the first stage of our motion capture pipeline using wireless IMU devices and Edge Impulse.
The goal:
turn raw acceleration gyroscope data into rehabilitation exercise detection.
Before ARMIC can adapt to a patient, it needs to recognize how the patient is moving.
Perception → Motion Capture → Adaptation 🤖
9
8
34
2,558
Jun 2
Foundation phase update 🛠️
Last week we demonstrated local Edge AI on the Arduino UNO Q.
This week we're focusing on perception.
We're experimenting with ECG signals, motion sensing, and MQTT-based data pipelines to help ARMIC better understand patient activity during rehabilitation sessions.
The goal isn't just automation.
It's building systems that can observe, understand, and eventually adapt in real time.
5
9
36
4,303
May 28
Foundation phase update 🛠️
We’ve started validating the Edge AI architecture behind ARMIC using the Arduino UNO Q local SmolLM2 inference.
Current setup:
→ llama.cpp running locally
→ MCU MPU synchronization
→ Local WebUI
→ Real-time peripheral coordination
→ On-device AI execution
This is one of the first steps toward an autonomous rehabilitation system capable of real-time robotic interaction directly at the edge.
Walkthrough below 🤖
5
6
20
2,826
May 28
We also documented the architectural transition behind ARMIC and why local Edge AI changes everything for rehabilitation robotics:
github.com/altaga/Armic-SOL/…
4
11
1,112
May 28
One of the main reasons we migrated from the ESP32 to the Arduino UNO Q was the need to keep both AI inference and hardware coordination on the same edge device.
Instead of relying on cloud execution, the goal is to enable:
• local inference
• real-time motor control
• synchronized MCU MPU operation
• adaptive robotic interaction
This shifts ARMIC from rigid automation toward autonomous rehabilitation systems driven directly at the edge.
1
3
10
966
May 19
ARMIC Roadmap (Next 3 Months) 🛠️🤖
Phase 1 — Foundation
• Expand hardware stack (Arduino robotics)
• Improve agent execution flows
• Refine onchain payment logic
• Continue open development updates
Phase 2 — Physical AI
• Integrate robotic arm interactions
• Connect autonomous actions with onchain triggers
• Test machine-to-machine coordination flows
• Begin real-world automation demos
Phase 3 — Deployment Layer
• Expand Solana infrastructure
• Improve interoperability
• Launch more public demos
• Move toward continuous real-world operation
We’re building toward systems where AI agents, robotics, and programmable finance converge.
22
9
40
10,048
May 19
The project has grown, the market has spoken so we have to deliver now.
- Will be updating more than Bi-weekly.
- Documenting everything
- All open-source
In addition to this Blue checkmark ✅️
3
2
17
2,089
May 14
From onchain → to real hardware.
Used part of the project fees to start expanding the physical AI side of ARMIC.
Arduino setup just arrived.
Robotic arm next.
We’re interested in building systems that don’t just exist on charts, but interact with the real world 🤖
15
9
41
7,077
May 14
Arduino Q for the uninitiated. Pretty much a microcontroller with AI capabilities. Ordered quite a few.
5
3
18
2,762
May 3
I just made a purchase from @dexscreener using @moonpay 🔥
moonpay.hel.io/pay/69f6ef916…
Man of my word, DEX paid. See you the next update.
29
2
47
4,477
May 3
We didn’t win.
We’re still building.
The fees from $ARMIC are going into hardware, platform development, and open-sourcing the system.
We’ll also enable DEX liquidity so it becomes a community token.
3-month roadmap. Biweekly updates.
This doesn’t stop here.
20
3
48
5,037

Armic retweeted

May 3
Thesis on Armic (@projectarmic):
@projectarmic is a legitimate early-stage DeSci project building autonomous AI agents for patient recovery — AI that tracks, adapts, verifies, and rewards rehab progress, paired with robotic execution and on-chain incentives.
The team is fully doxxed: biomedical engineers Luis Eduardo Arevalo Oliver (@EddOliver_), Alejandro Sanchez Gutierrez, and Victor Alonso Altamirano Izquierdo (@outlay_pay), with real experience in healthcare hardware, IoT, AI agents, and Web3 systems (prior hackathon work and roles at Blank!t).
Launched transparently on Solana via @EasyA_Kickstart (in collaboration with @dom_kwok and @kwok_phil), with immediate supply locking via @Streamflow_Fi, fee allocation for hardware/open-sourcing, and a focus on real builds over hype.
In a $30B rehab market crippled by poor adherence, this combination of AI autonomy, robotics, and tokenized incentives has genuine product-market fit potential. High execution risk (still pre-product), but the doxxed builder team, on-chain transparency, and narrative alignment (AI agents health DeSci) make it one of the more credible micro-funding experiments in the space right now.
10
10
38
10,123
May 2
Just for transparency, the money for fees WILL be used to improve the project and Open Source it. In term of better hardware, documentation and partnership with hardware companies. This is a purely DeSci and micro-funding initiative, of course inspired by @EasyA_Kickstart
6
2
15
2,442
May 2
Quiet before results.
We didn’t spend this time optimizing optics.
We built the next layer:
→ agents
→ Solana integration
→ real flows
Outcome is one checkpoint.
We’re playing a longer game.
Still hoping for the best 😁 @EasyA_Kickstart
2
3
14
2,566
May 2
🔐 Just locked 1,391,172 $ARMIC tokens with @Streamflow_Fi
No shortcuts.
Long-term alignment > short-term extraction.
Building for real systems, not hype.
It's on-chain. You can check the amount, time-period and recipients.
Check it out👇
app.streamflow.finance/contr…
6
3
10
2,333
May 1
We’re live!
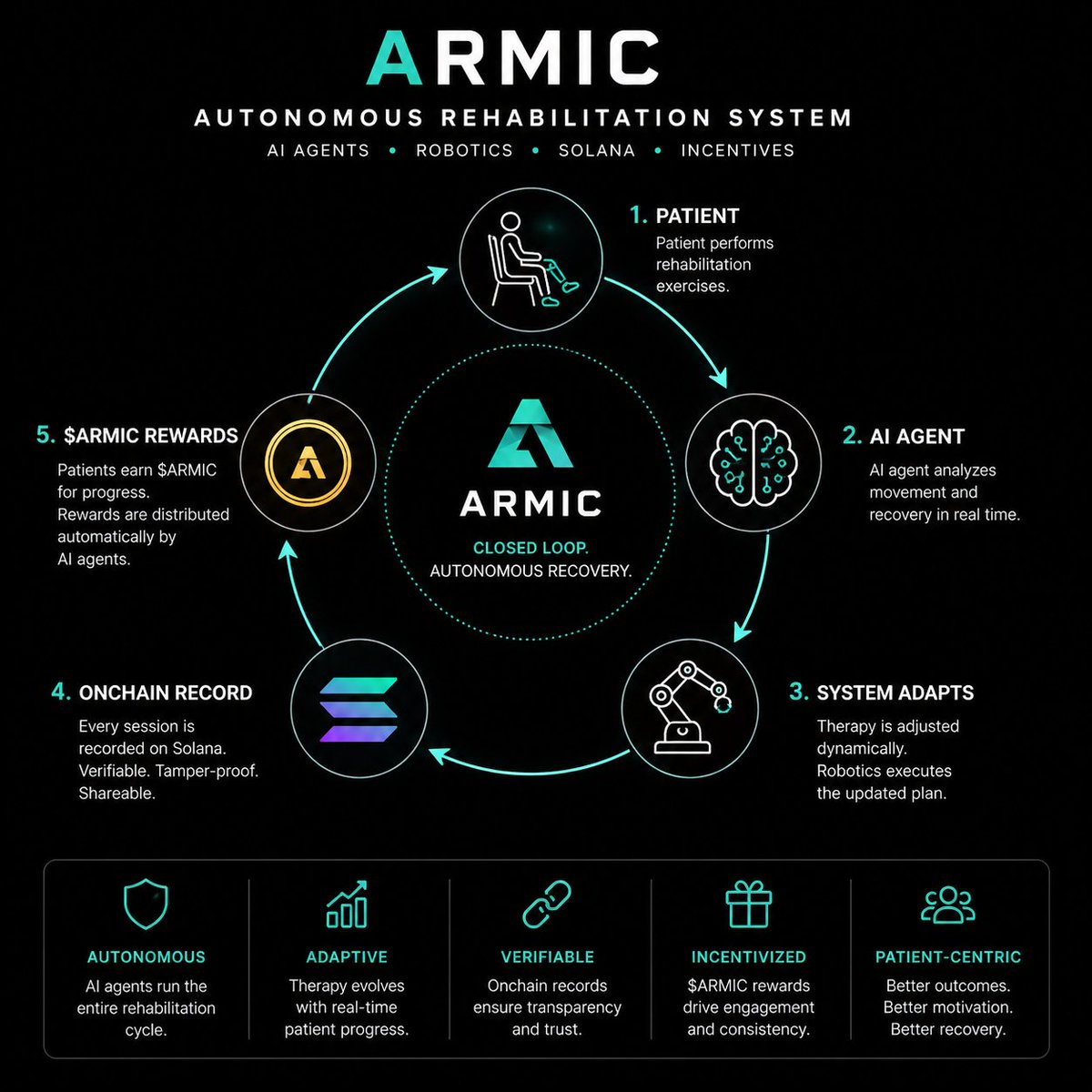
Introducing $ARMIC —
Autonomous rehabilitation powered by AI agents, robotics, and onchain incentives.
Now live on Solana via @EasyA_Kickstart
Join the launch (Only through this link, we already have copycats) ↓
kickstart.easya.io/token/DcT…
5
2
16
3,030
May 1
Full breakdown ↓
Docs: notion.so/Armic-dc6f73a8af87…
ARMIC =
track → adapt → verify → reward
Autonomous rehabilitation.
1
5
1,418
May 1
Why this matters:
Rehab today = manual, inconsistent, untracked
ARMIC = adaptive, verifiable, incentivized
That’s the shift.
@dom_kwok @kwok_phil
1
6
1,059