
Joined February 2012
- Tweets 828
- Following 336
- Followers 138
- Likes 475
120 Photos and videos










29 Sep 2023
pikvm spindle in walnut and silky oak. I still feel bad about the plastic utility box in the design. The pi could be in a solid but ventilated wooden layer at the bottom. I've already had occasion to use it on a multihomed nas that changed nic ids. #RaspberryPi
1
104
18 Jul 2023
second time a firmware update has stopped the samsung phone from wireless charging. Seems like something quality control could have noticed prior to rolling out a "security fix". I assume that is it as it stopped again just after an update :/
45
8 Jun 2023
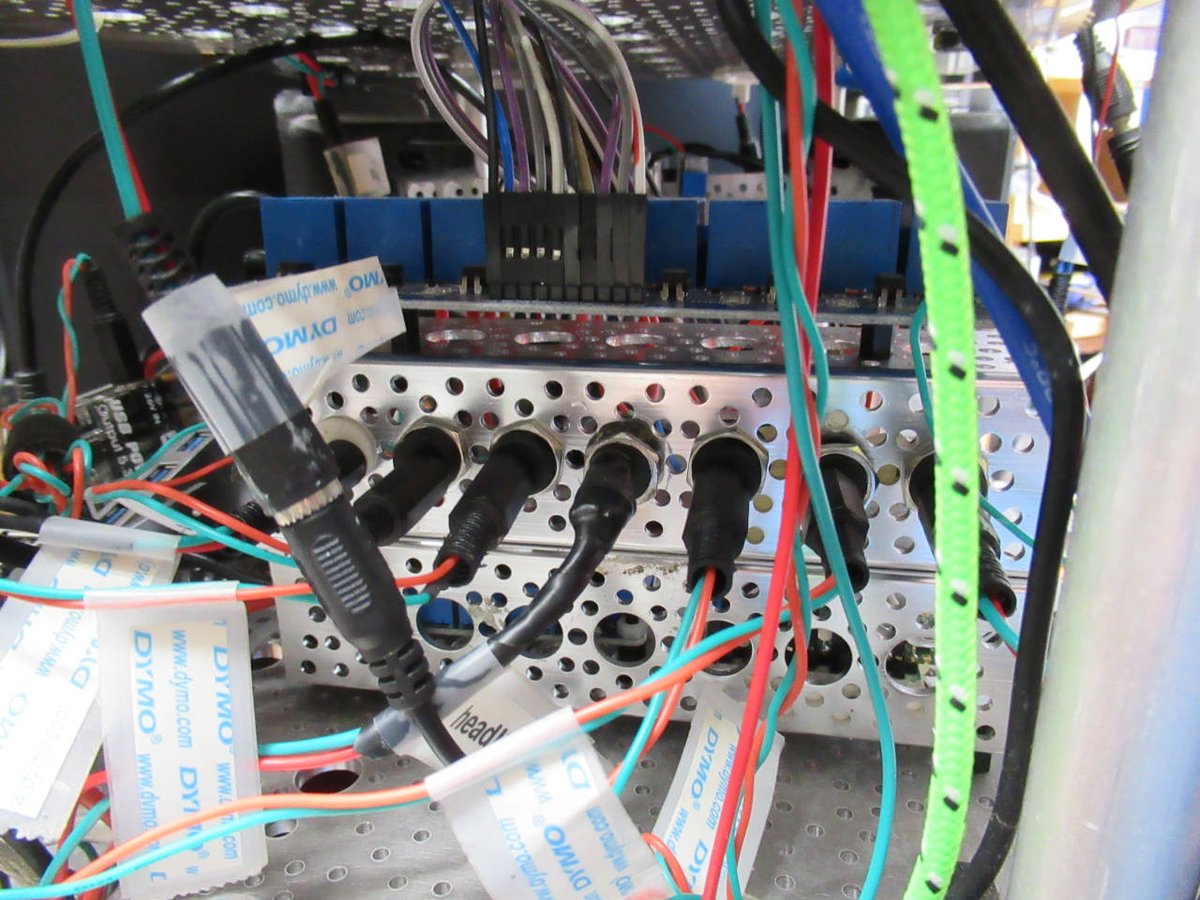
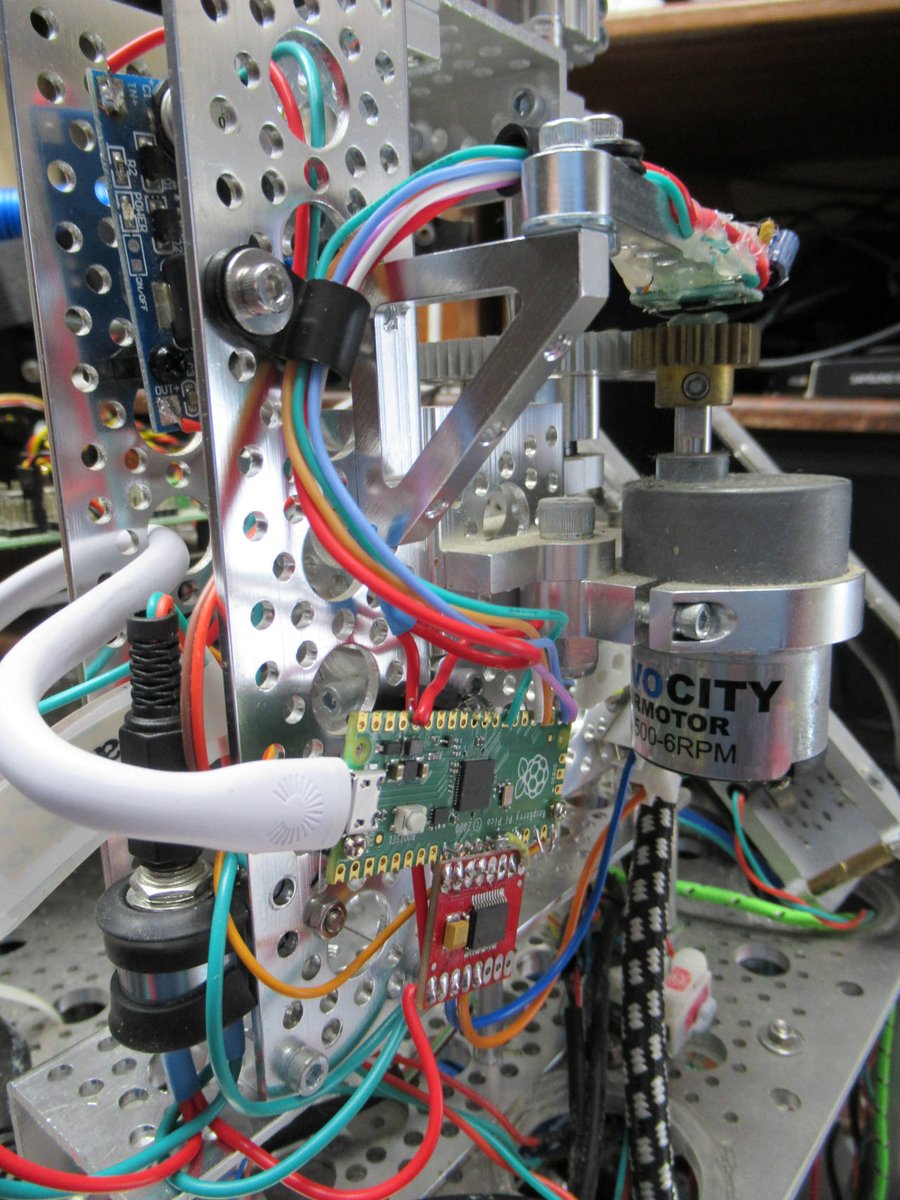
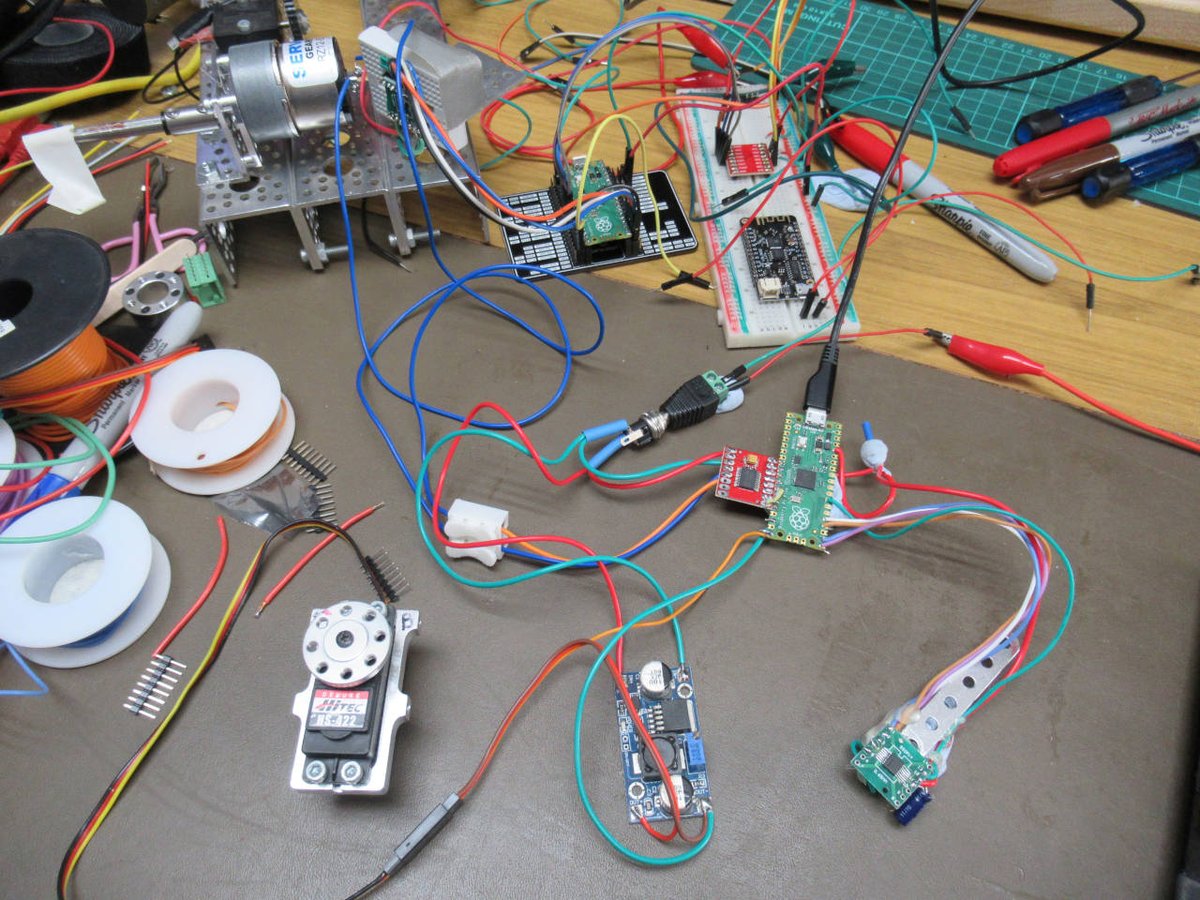
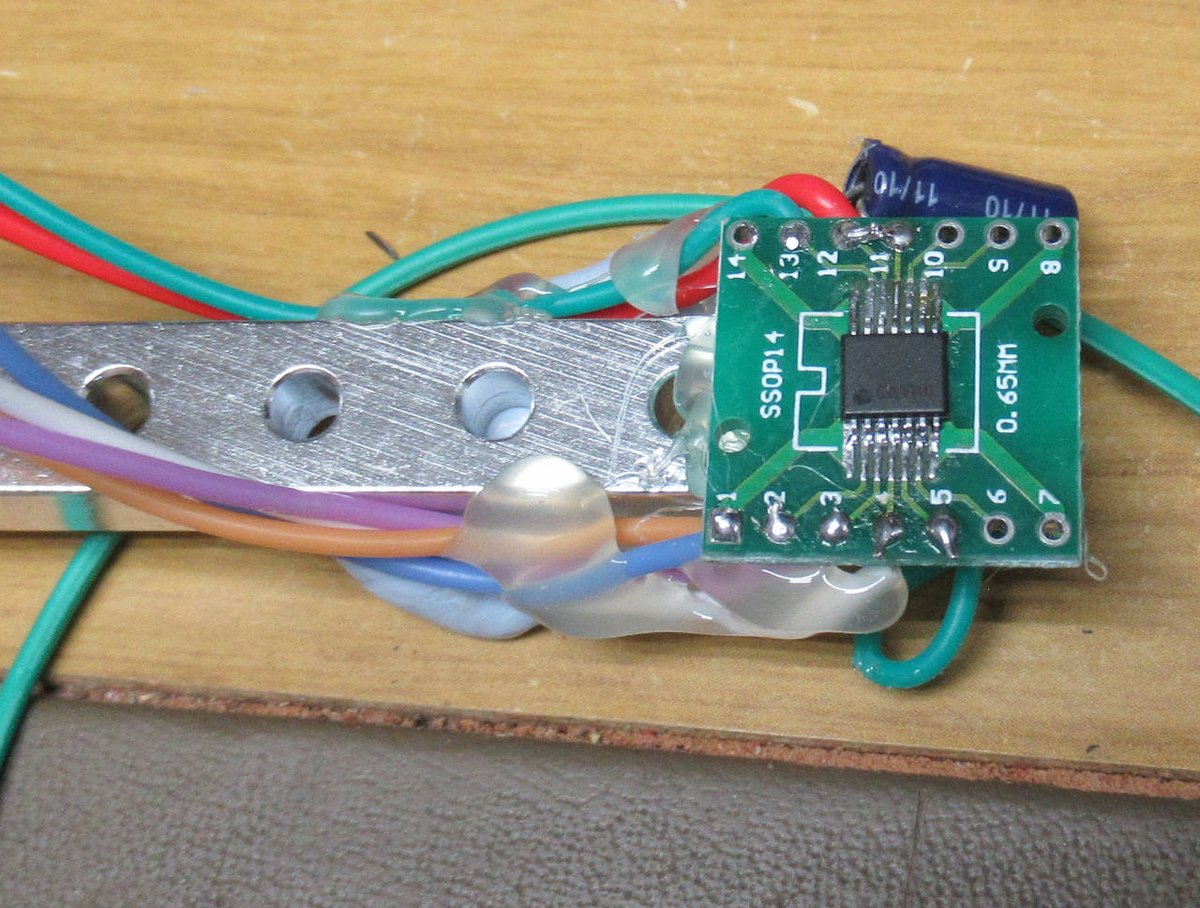
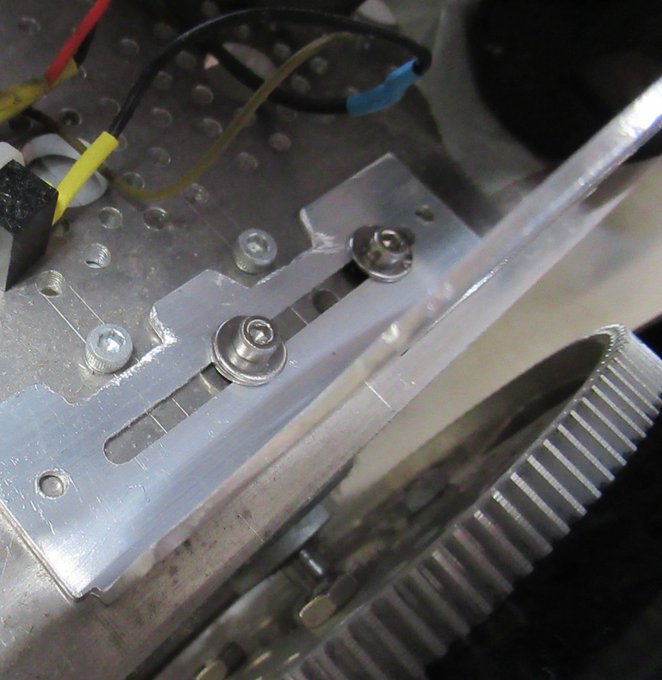
Rebuilt the pan element of Terry the #ros robot. Bearings with locking collars in mounts separated by a good distance for stability. The slip ring has moved below the top layer of the robot now as the 12mm OD shaft fits nicely through the 1/2 inch hole below. #microROS ctl p/t!
2
15
2,092
14 May 2023
Wera quarter inch drive tool tray. This holds one of the large kits plus deep sockets and some other drivers I had. 18mm walnut tray on little rubber feet. I considered laying down the deep sockets for minimum z height. Quick & easy access to the tools! @weratoolsuk
1
5
917

27 Feb 2023
A small palette of Wera stubby drivers. The bit driver at the back sort of fits in there for driving other patterns.
1
80
27 Feb 2023
Wera T-Handle hex plus holder. The larger ones are fairly stable but the 2.5 wants a little hat to stop it from rotating when in place. Some HomeAssistant control panel love in green button form right next to them. Always nice to have a hound release button at hand.
1
102
26 Feb 2023
I'm not sure if using ROS2 or ROS 2 will make the porting any easier :o
76
27 Jan 2023
Those bright backgrounds at the verge... makes you need to be absolutely sure you really want to read it.
77

We are still accepting submissions for our Call for Proposals. See our website or cfp.nluug.nl/ for more details.
Topic suggestions: DevOps, networking, security, open standards, open technologies, system administration, software development.
RT is appreciated!
6
3
718
2 Dec 2022
This looks like a great week tinkering on robot vision! Too far for Terry the ROS Humble bot to travel :(
1 Dec 2022

Registrations for the #RoboticVision #SummerSchool are open! If you are a 1st year PhD/Master's student, or working in INDUSTRY but looking to upskill yourself in robotic vision, join us 6-11 Feb 2023 at the beach in #Kioloa! rvss.org.au/ @RoboticVisionSS

2
22 Nov 2022
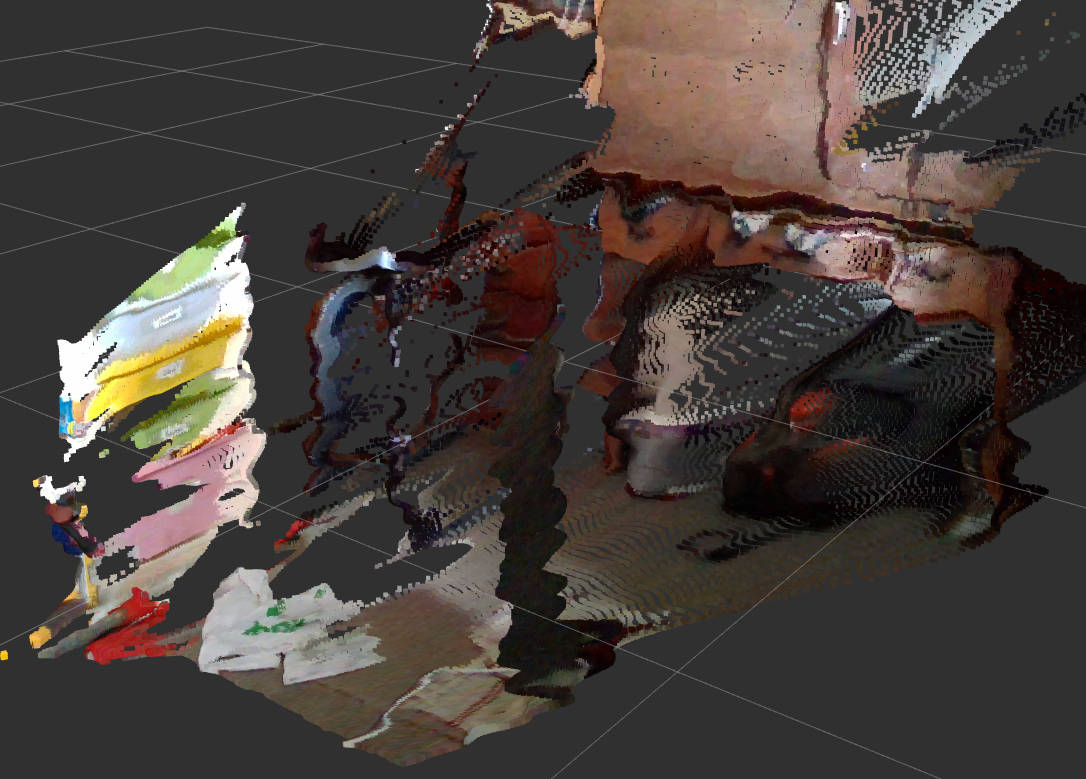
#ros humble with octomap_server and a realsense camera. A quick first test where my arm enters the frame and moves upwards and then is removed again. Interesting to see the probability colouring and the decay that finally removes my old arm positions!
7
31
18 Nov 2022
I am now also up at @monkeyiq@fosstodon.org hopefully I can reconnect with some of the ROS folks over there.
14 Nov 2022
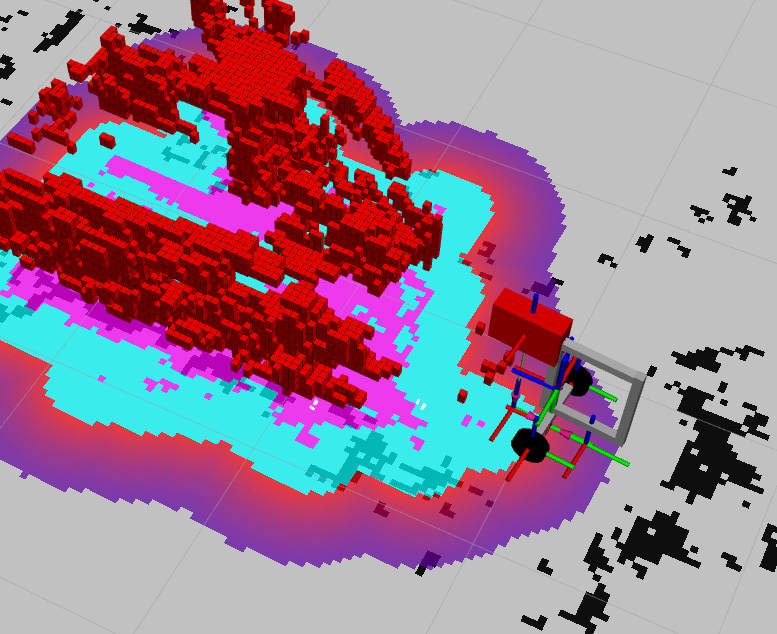
Voxel Layer in #ros 2 humble now detecting 15 voxel levels of the local obstacles! Pumping the 720 stream through a 1 message per second filter makes it go. Also added the large message tweak for cyclonedds. Still no luck with svtl layer.
1
1
14 Nov 2022
Using the raw point cloud from the realsense d435 at 720p x 30 fps tends to overload things but I only saw that was the issue when I switched to 320 and a decimation filter. Best to keep full res and only forward one 720p frame per second for now.
1
2
14 Nov 2022
I am still publishing the voxel map which is resource hungry. But if you can, and like to see it at 1 fps it is lovely :) Works well for detecting road blocks as it doesn't need to be super fast.
1
11 Nov 2022
Looking forward to using the Spatio-Temporal Voxel Layer on #ros humble but bumped into the openvdb 8.1 on jammy issue... compiling...
github.com/AcademySoftwareFo…
6 Nov 2022
#ROS 2 humble with a local costmap and voxel grid for depth image. Voxels are slightly larger than the map resolution because they can slow things down quite a bit. Using cyclonedds for this test.
5
28
6 Nov 2022
After playing with getting the local costmap going in #ROS 2 humble I discovered the following. It might save some time for others who are trying to tweak config files still...
github.com/ros-planning/navi…
2
2
11
6 Nov 2022
There is a local costmap with
export RMW_IMPLEMENTATION=rmw_cyclonedds_cpp