
8 Photos and videos

Pinned Tweet

10 Jun 2024
⚡️“Towards Generalist Robot Learning from Internet Video: A Survey” ⚡️
Collecting robot data is hard.
In our new survey, we review methods that can leverage large-scale internet video data to help overcome the robot data bottleneck: arxiv.org/abs/2404.19664
See more below👇
3
25
88
28,610
Mar 6
Reasoning models struggle to control their chains of thought... and that's good for AI safety!
Mar 5

We have a new eval to help keep chains of thought (CoT) monitorable: CoT Controllability.
This tests whether LLMs can control their CoT, helping to evade CoT monitors.
So far, the results leave us cautiously optimistic: today’s models struggle to obfuscate their reasoning in ways that undermine monitorability.

1
4
400
24 Jul 2025
Happy to share that our survey paper has been accepted to JAIR!
Data scarcity continues to be a *major* bottleneck for general-purpose robotics. Check out our updated survey to see how internet-scale video data can help!
Original 🧵: x.com/rmcc_11/status/1800154…
22 Jul 2025

New Article: "Towards Generalist Robot Learning from Internet Video: A Survey" by McCarthy, Tan, Schmidt, Acero, Herr, Du, Thuruthel, and Li jair.org/index.php/jair/arti…
3
150
10 Jun 2024
We also review LfV datasets and benchmarks. We detail techniques for curating and annotating video datasets. We note a lack of LfV-specific benchmarks and provide recommendations for how future LfV benchmarks should be designed.
1
275
10 Jun 2024
Amongst other key takeaways, we recommend:
- Adopting scalable techniques that can leverage as much internet video data as possible.
- Focusing on learning policies and dynamics models directly from video data, in order to best obtain the benefits of LfV.
1
257
10 Jun 2024
Thanks to my excellent collaborators and supervisors! @DanielCHTan97, @schmidtdominik_, @fernandoacero_, Nathan Herr, @du_yilun, Thomas Thuruthel, Alex Li
Paper: arxiv.org/abs/2404.19664
If you have any feedback, questions, etc., please do get in touch!
249
10 Jun 2024
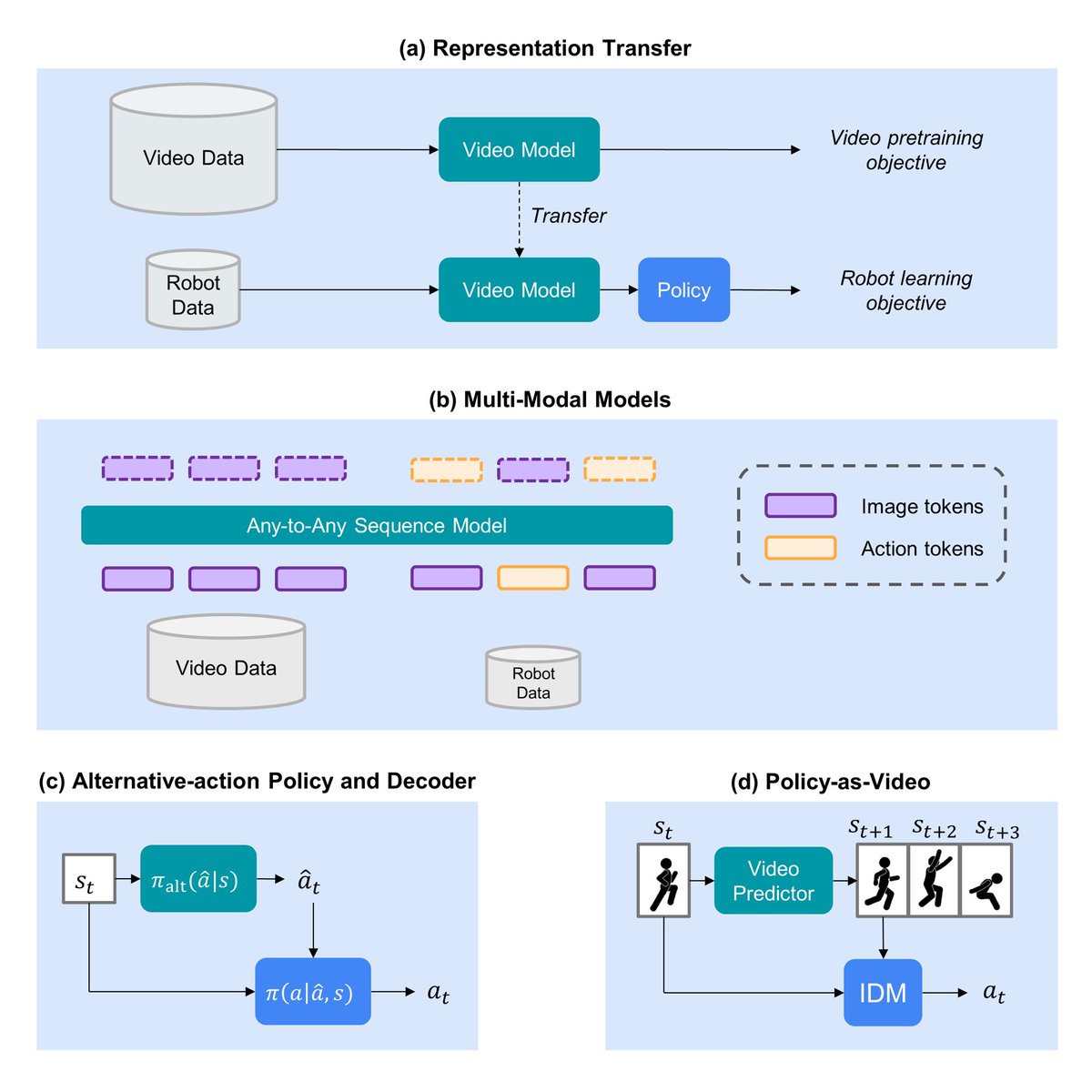
There are several promising directions for learning policies from video data. Here, it is not yet clear whether monolithic or compositional approaches will prevail.
1
231
10 Jun 2024
⚡️“Towards Generalist Robot Learning from Internet Video: A Survey” ⚡️
Collecting robot data is hard.
In our new survey, we review methods that can leverage large-scale internet video data to help overcome the robot data bottleneck: arxiv.org/abs/2404.19664
See more below👇
3
25
88
28,610
10 Jun 2024
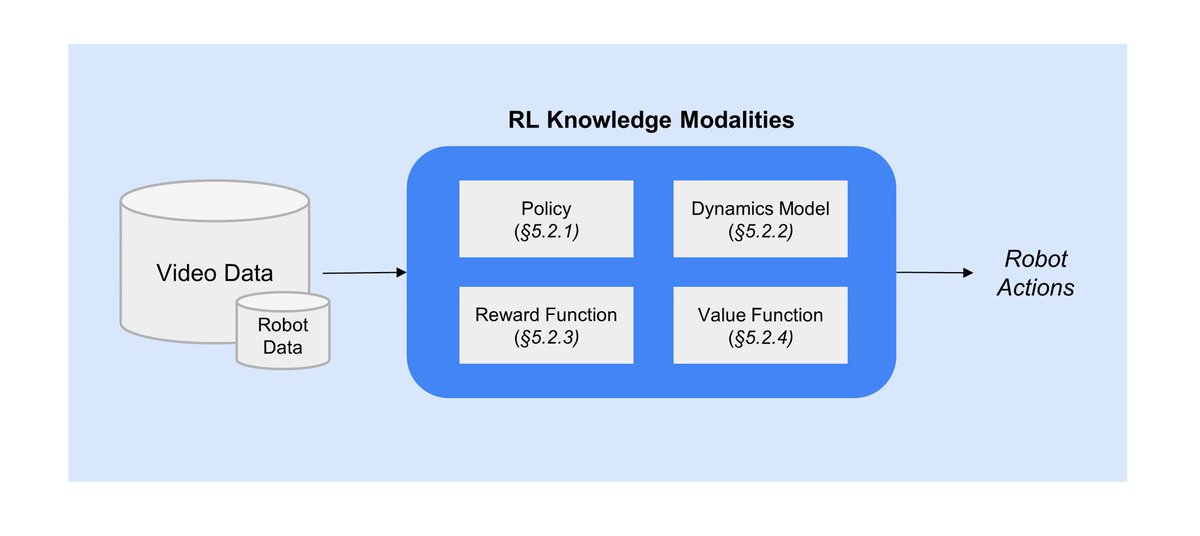
⚡️ LfV-for-Robotics ⚡️
Video data can be used to learn an RL ‘Knowledge Modality’ (KM). Targeting each KM comes with its own pros and cons. We believe targeting the Policy and Dynamics Model to be most promising.
1
208
10 Jun 2024
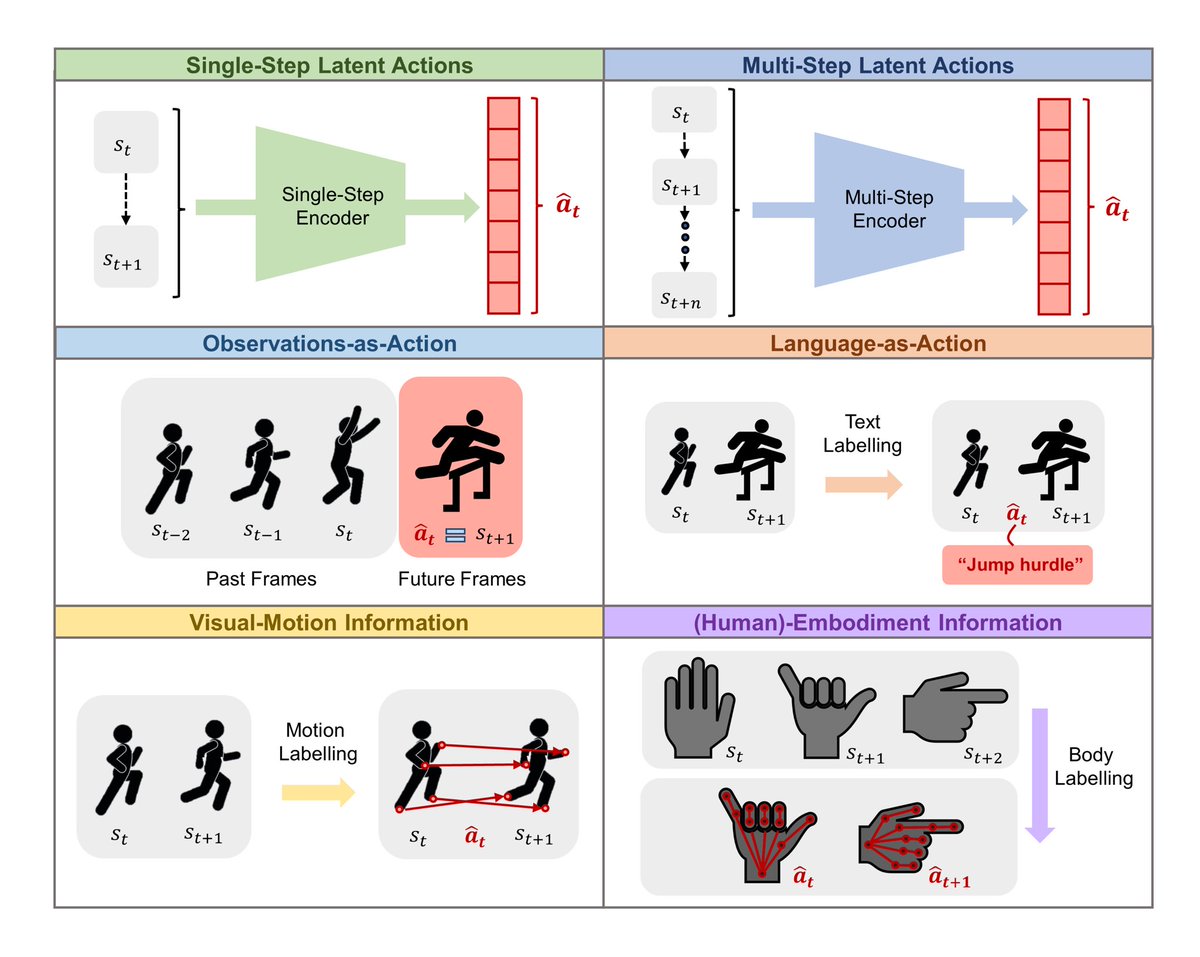
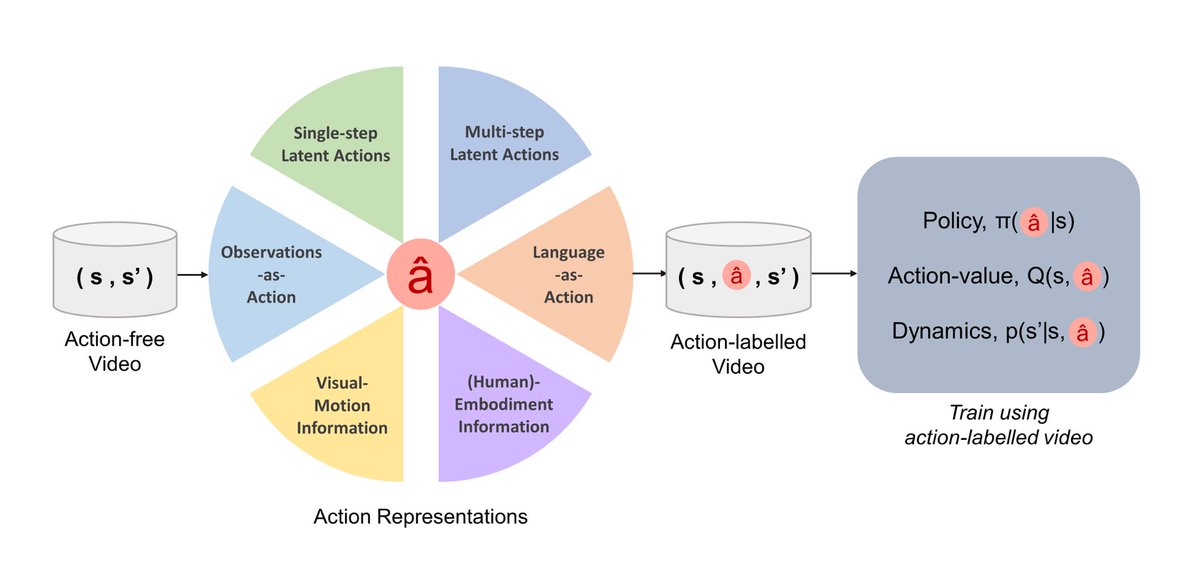
We identify and review several categories of action representations. Latent actions are promising but have yet to be scaled to large-scale, ‘in-the-wild’ internet video.
1
1
210
10 Jun 2024
⚡️ Action Representations ⚡️
Problem:
We wish to obtain an action-outputting robot policy. However, internet video does not come with explicit action labels.
Solution:
Use action representations to relabel video data with explicit action information.
1
1
220
10 Jun 2024
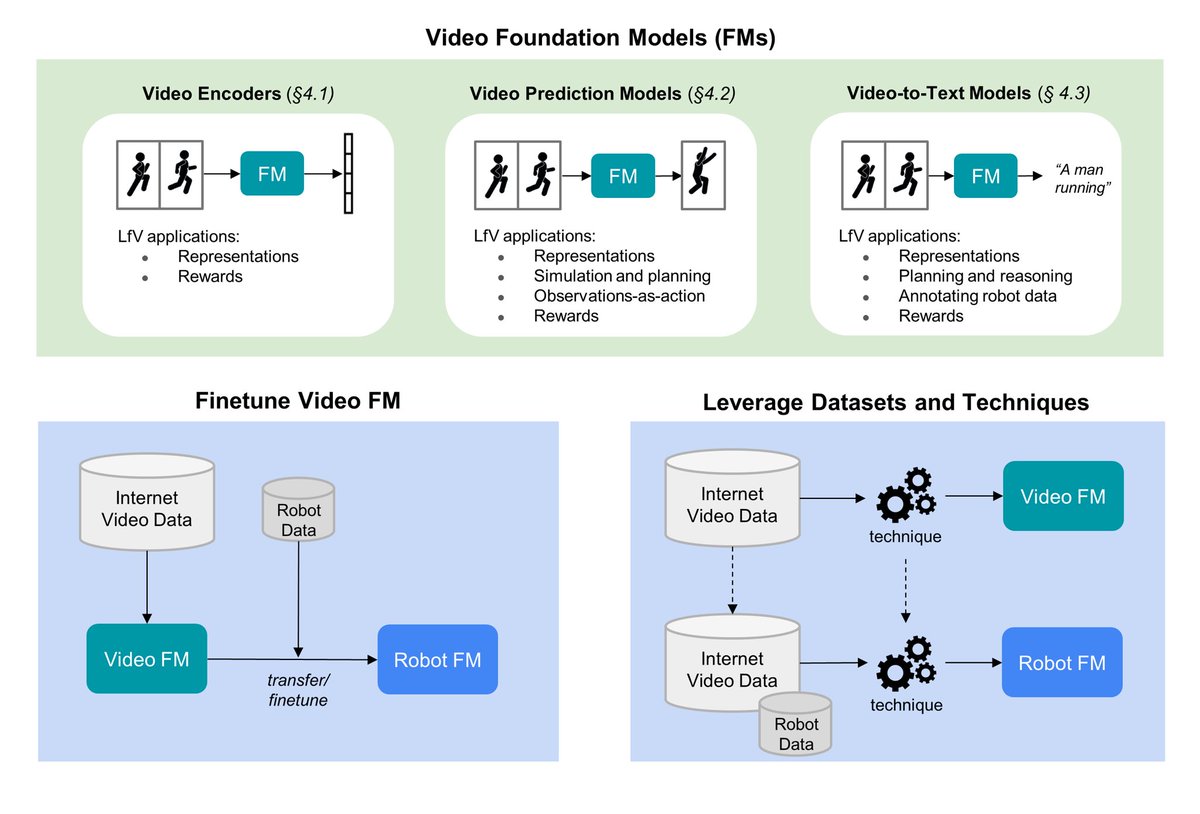
⚡️ Video Foundation Models ⚡️
Scalable video foundation model techniques are promising for extracting knowledge from large-scale, heterogenous internet video datasets. We review these in detail in our survey.
1
1
256
10 Jun 2024
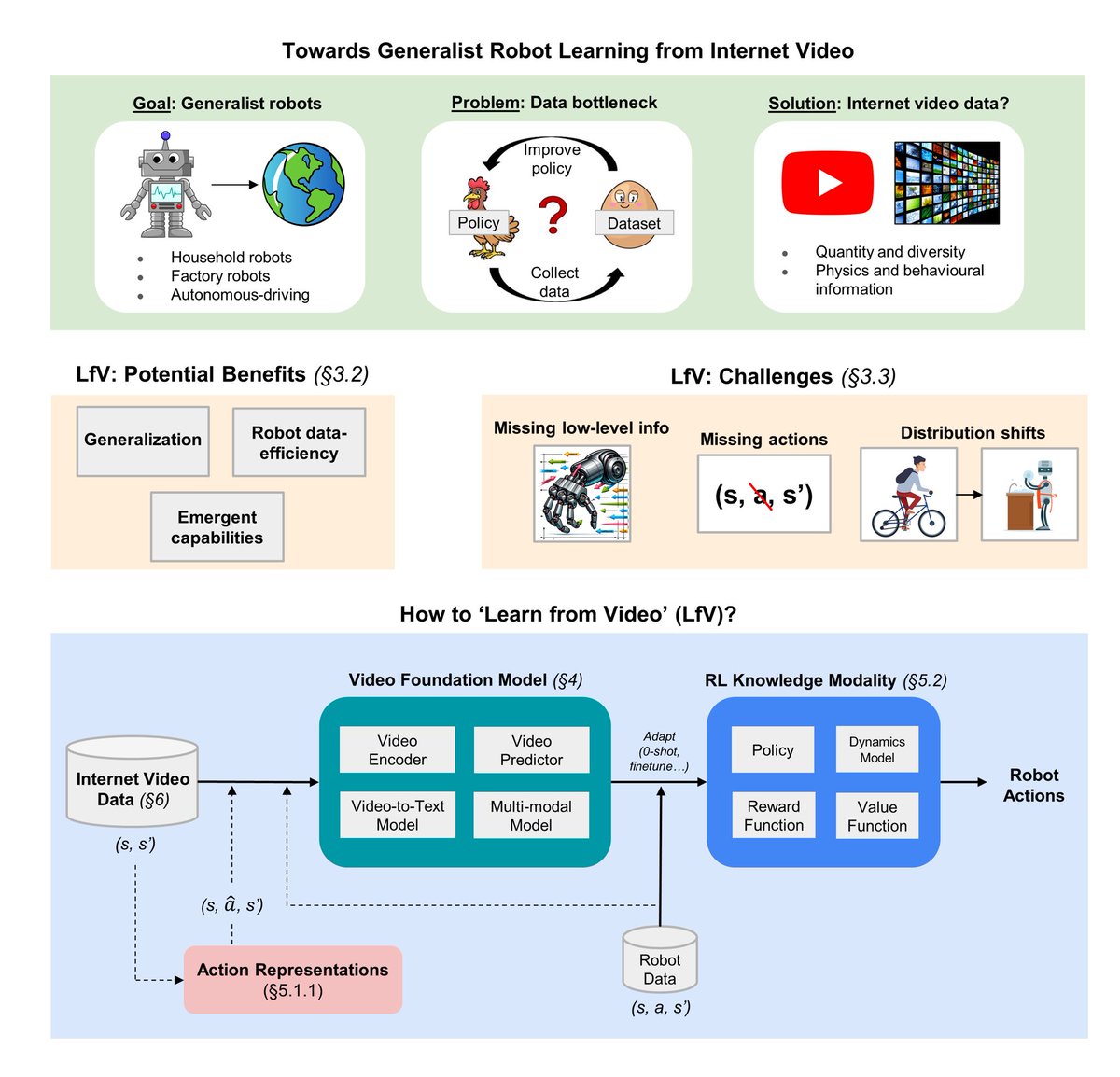
⚡️ LfV Challenges ⚡️
However, LfV comes with several challenges, including:
- Missing action labels and low-level information in video
- Distribution-shifts between internet video and the robot domain
- High-dimensionality, noise, and redundancy in video data
1
1
344
10 Jun 2024
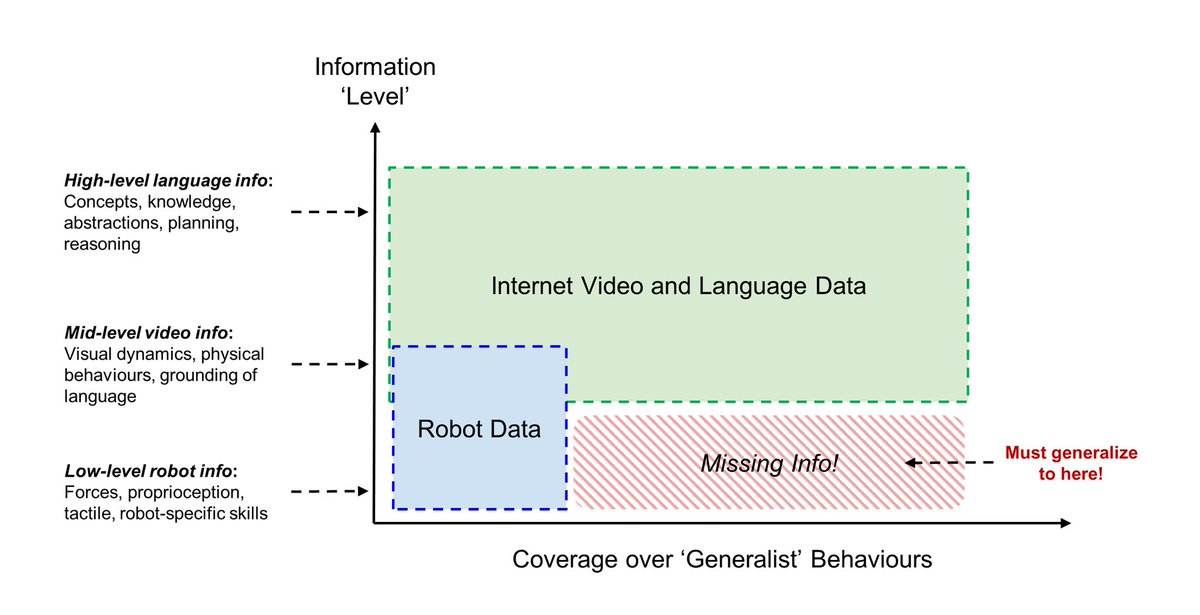
⚡️The Promise of LfV ⚡️
Internet video comes in massive quantities and contains information highly relevant to a generalist robot.
As such, Learning from Videos (LfV) promises benefits such as improved generalization and data-efficiency w.r.t the available robot data.
1
1
434
18 Jun 2023
Big thanks to @aegeanairlines for the generous scholarship covering my round-trip flights to @M2lSchool!
Looking forward to attending the M2L summer school soon!
1
103