🪧自律ロボットのPoC協力企業募集中です/4足ロボット×ドローンの空陸連携技術を開発中。Unitree Go2 / ROS2 / Nav2 / FAST-LIO2 で自律走行システムを構築してます。開発の備忘録としてつぶやきます。
Joined April 2026
- Tweets 40
- Following 2
- Followers 114
- Likes 18
12 Photos and videos








Pinned Tweet

Unitree Go2 が届きました🐕📦
ここから自律走行システムを構築していきます。
ROS2 Nav2 FAST-LIO2 で
4足ロボットの完全自律巡回を目指す。
開発の過程をこのアカウントで記録していきます。
#ロボ犬 #UnitreeGo2 #自律走行 #ROS2 #4足ロボット



1
14
1,350
ドローンと四足ロボットは競合ではなく補完だと思っています。
ドローンの役割として、
・広域を速く見る
・上から俯瞰する
・ただし屋内/狭所/長時間滞在が苦手四足ロボット:
・近接確認
・長時間巡回
・ドローンが飛べない場所を歩ける
空と地上の分業を実現します。
24
車輪ロボットでいい場面は多い。
それでも四足ロボットに取り組む理由は、現場がいつも平坦で整理されているとは限らないから。
段差、ケーブル、傾斜、瓦礫、狭い通路。ただし四足は制御も自己位置推定も難しい。
だからまずNav2 既製歩行で価値を作り、後段で歩容最適化に進む計画です。
1
5
174
ロボット開発、シミュレーションで動いた瞬間より、現場で動かなかった瞬間の方が情報量が多い。
・低速で歩けない
・地図が二重になる
・時刻が1970に戻る
・topic型が衝突する
・costmapが狭すぎて動けないこういう泥臭い失敗が、最終的なプロダクトの仕様を決めていく。
2
212
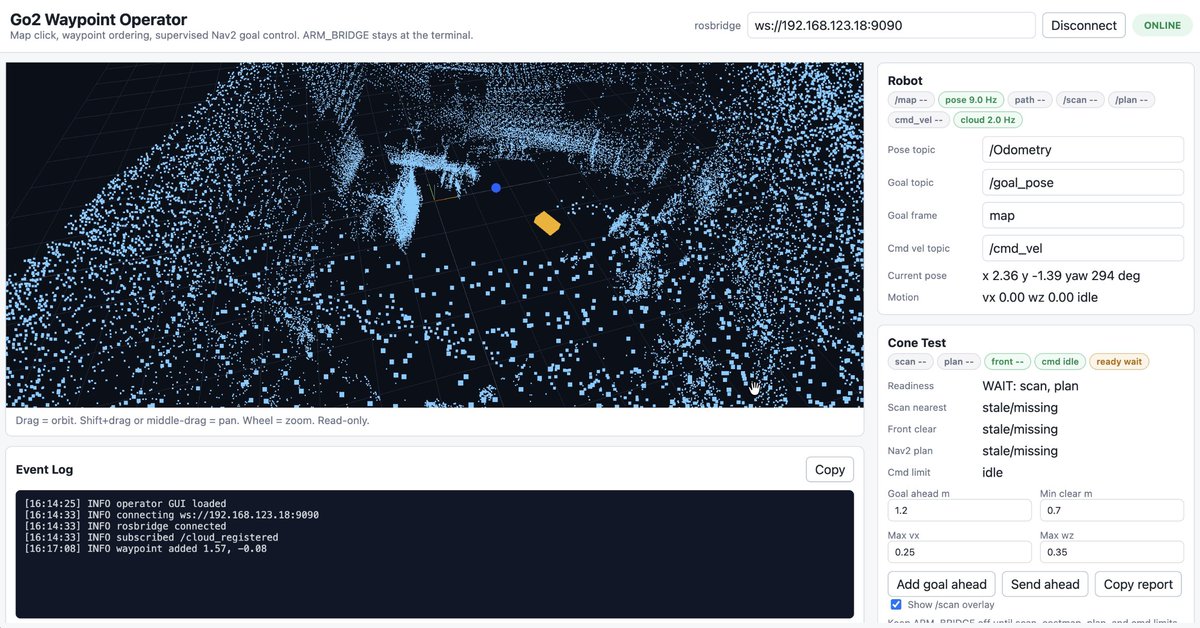
【ロボット操作UIの形】
目標地点の指定は2D地図が一番わかりやすい。
でも、倉庫内の棚・天井・二重壁・上下反転は3D点群で見たい。
なのでUIは
左: 2D mapでwaypoint操作
右: 3D point cloudで状態確認
下: 接続/goal/巡回/停止
で実装しました
1
55
Go2専用 operator GUI】
Foxgloveでgoal送信はできますが、waypoint巡回の運用には少し弱い。欲しいのは
・地図上クリックでwaypoint追加
・巡回順のドラッグ変更
・この地点へ移動
・巡回開始/停止
・robot pose / scan / cmd_vel 状態表示なのでGo2専用のoperator GUIを作りました。
1
105
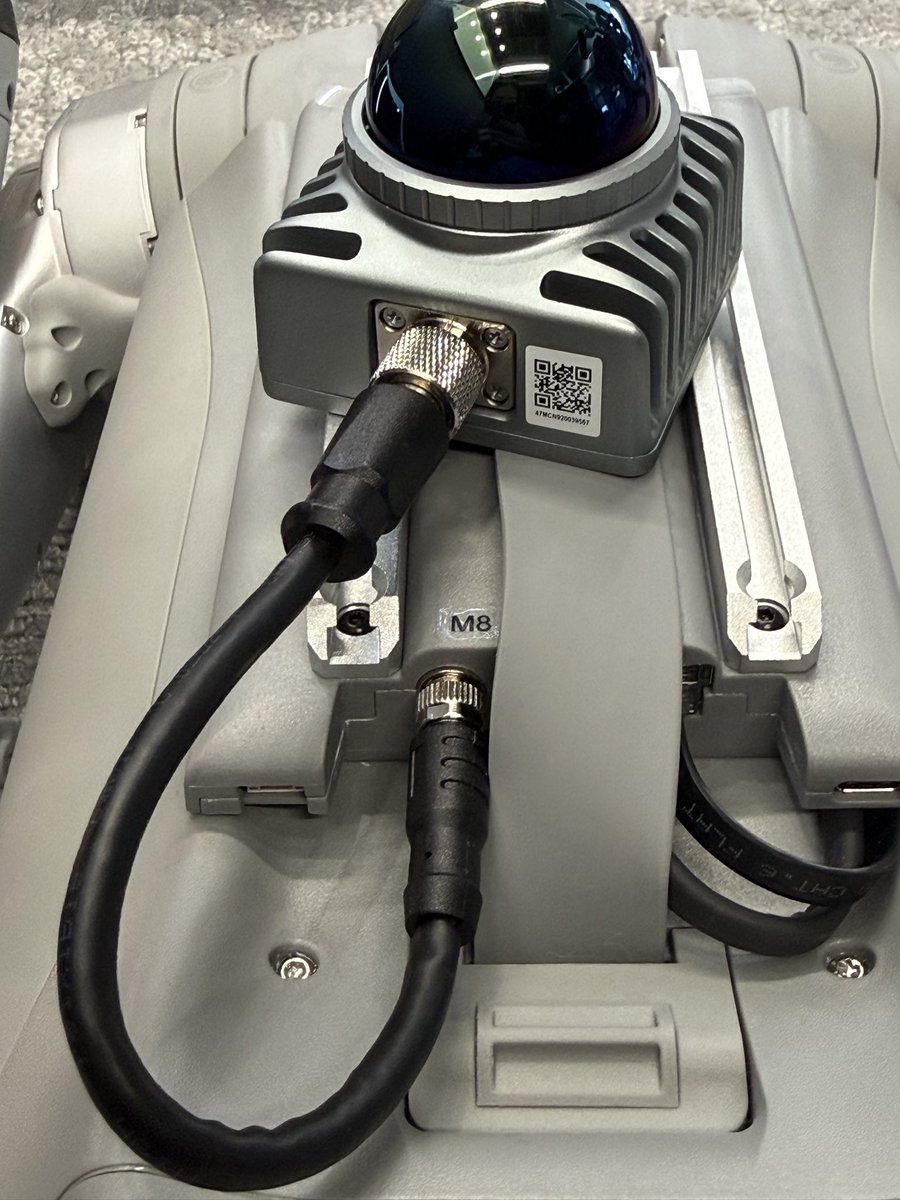
Go2を動かす前に、Scan Mode acceptance scriptで最低条件を確認するようにしました。
チェック項目:
・Orin時刻
・required topics
・topic type
・topic rate
・/scan frame_id
・odom→base_link TF
・bridgeがarmされていないこと
1
55
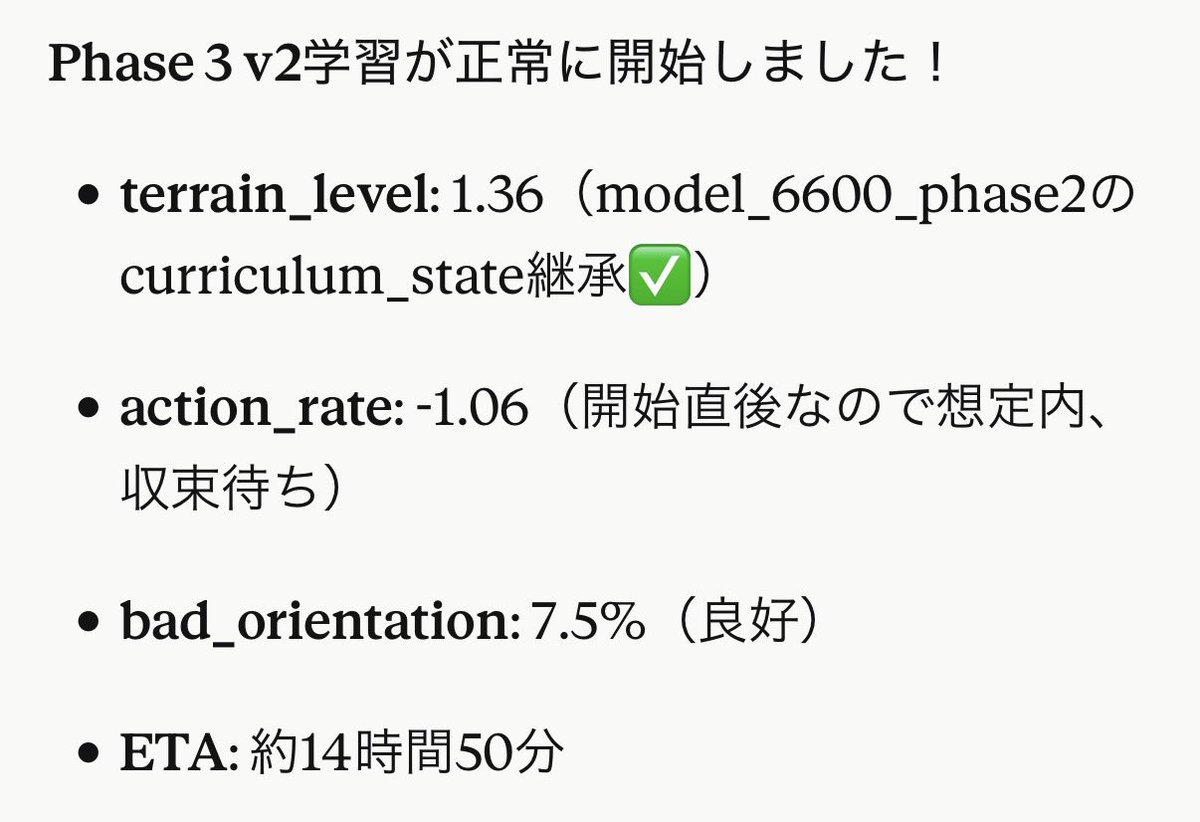
我々は強化学習進捗は全てClaude Codeによって監視するようにしています。
これにより/remote-controlを使用することで外出中でも学習進捗を見ることが可能です!
#ai #claudecode #go2
1
2
70
進捗を逐一取得するのはメインスレッドのコンテキストを逼迫させてしまうため、サブエージェントを起動させ結果だけ返させるようにするのがおすすめです。
1
34
【PythonでLiDAR変換は間に合うか】
Mid-360は約10Hz、1 frameあたり約2万点
Pythonで CustomMsg → PointCloud2 変換すると重いのでは?と考えました
Mac上では:full fields: 89.48Hz相当
xyz_only: 177.58Hz相当
Orin実測は別ですが、Python loop自体は即ボトルネックではなさそう。
1
64
【Foxglove goal送信でハマった】
Nav2にgoalを送っているつもりが、Foxglove側の「2D Pose」publish topicが空欄のままでした。
rosbridge log:
advertise: Invalid topic name/goal_pose と入力してEnterで確定したら、Nav2がgoalを受信。
GUIの小さな設定ミスで1時間溶けるのがロボット開発ですね
1
52
4
154
ロボ犬 研究所@TechDrone retweeted

May 12
おっ!いつのまにかフォロワー100人になってる!
誰かの役に立てばとエンジニアチームが開発過程を投稿してくれています💪
今後は4足以外の無人ロボットも進めるかも?🤫
@techdrone_lab
1
19
812
【Go2 cmd_vel bridge復活】
libddsc.soリビルドで free_iox_chunk
undefined symbol
新版が iceoryx非対応 SDK namespace変更で死んでた。
両方対応した v2 を再ビルドして
Nav2 → /cmd_vel → Go2 SDK → 物理歩行 復活
#Go2 #ROS2 #DDS #Nav2
2
180
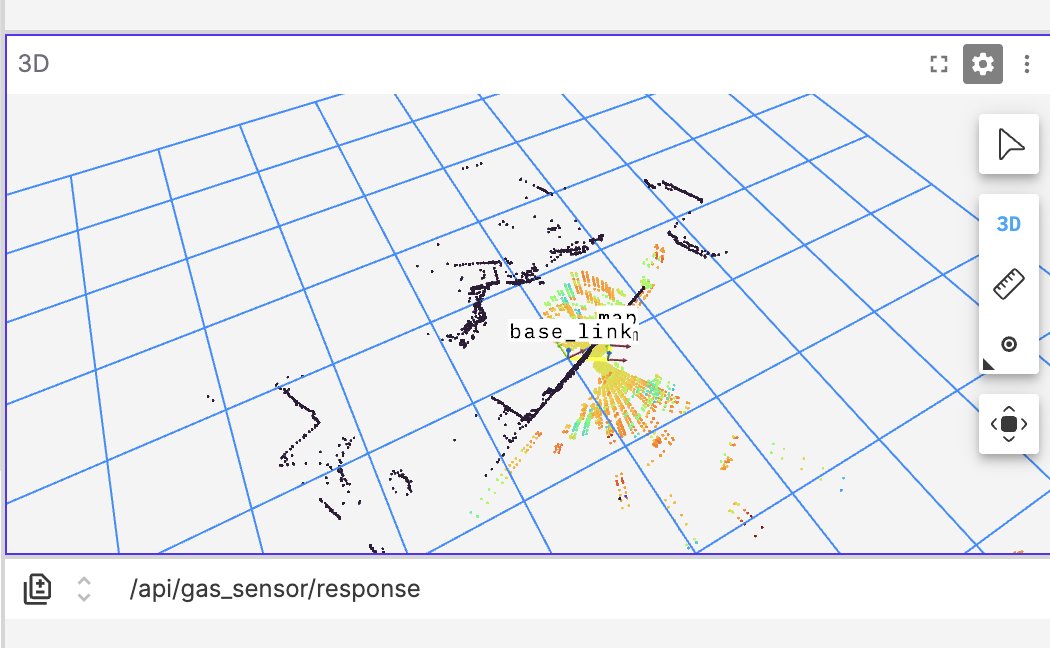
【LIO-SAM表示topicメモ】
今回の倉庫マップでは /map_global はダウンサンプルが強すぎて使い物になりませんでした。
Foxgloveで見るなら
・/lio_sam_ros2/mapping/cloud_registered
・Decayを長めにする
これで累積点群として倉庫輪郭が見えます。topic選びだけで見え方がかなり変わる。
1
170
超有益情報ありがとうございます❕❕
PTP同期設定します💪💪
May 11

イェーイ!
LIOは基本的にLiDAR座標系とIMU座標系のTFも解決してる必要があるんだぜ!
それから、livoxと体内PCはPTP同期してるかい?
4
283
【LIO-SAMで一番大事だった設定】
Go2 Mid-360 で LIO-SAM を動かす時、IMU topic は /livox/imu が正解でした。
最初はGo2本体の /dog_imu_raw を使っていましたが、LiDARとのtimestampが約2秒ずれて強制停止。
Mid-360内蔵IMUに切り替えたら、LiDARと同一クロック源になって安定しました。
6
108
9,557