
Collective computing and robotics.
Joined August 2025
- Tweets 22
- Following 0
- Followers 14
- Likes 72
9 Photos and videos



23 Oct 2025
Gm.
20 Oct 2025

working on this.
should be shipped sometime soon, Cohora's objective isn't solely delving into Robotics and reducing human inefficiency in the physical world with robots but also all things virtual.
2
1
7
121
20 Oct 2025
We're a little late.
The Replit agent along with many others will be benchmarked against Cohora's very own autonomous engineer.
Will be available at cohora.app/

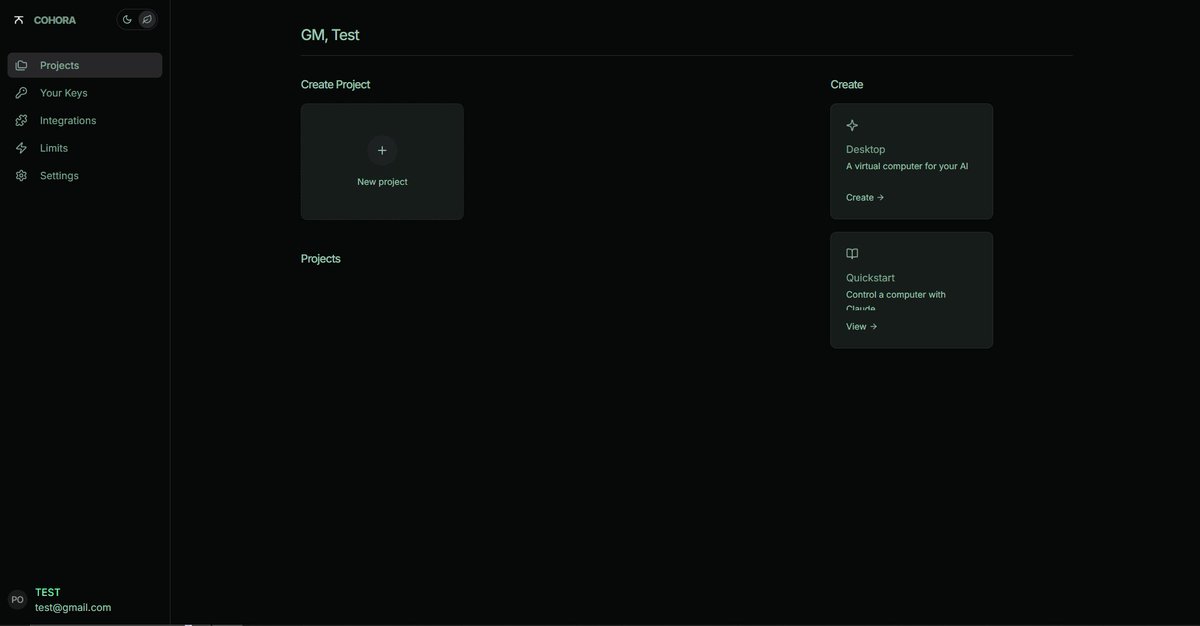
Imagine a world where Agents can help you test, fix, and improve your apps behind the scenes.
The all new Agent 3 now has even more automated testing to:
💻 Check buttons, forms, APIs, data sources etc
👀 Look for errors
🛠️ Apply fixes
Giving you hours back each day for more creativity.
2
1
7
143
19 Oct 2025
Discord community for our Cohora enthusiasts soon.
Let's connect!
1
6
66
18 Oct 2025
Robotics.
x.com/Rewkang/status/1940831…
3 Jul 2025

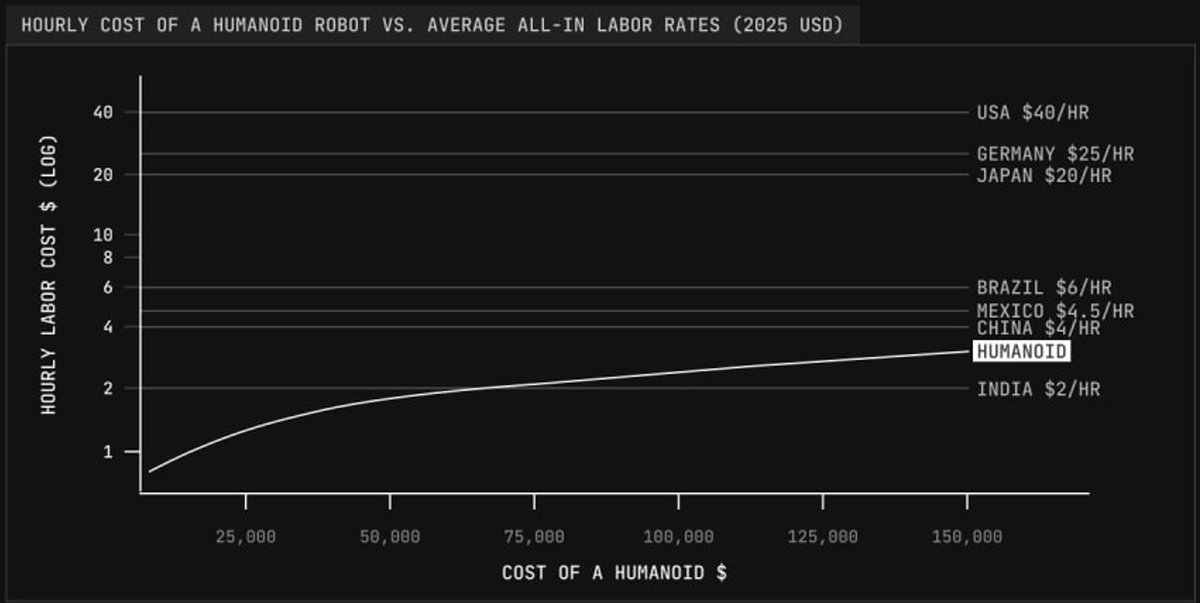
We took a look at the hourly cost equivalence of a humanoid at different price points vs human labor
A humanoid at $50,000 is more economical than even a worker in India at $2/hour
Human labor will be mostly unnecessary in the next decade
1
1
9
148
17 Oct 2025
This thread covers the high-level milestones, thus is missing a couple puzzle pieces.
We know many of you want deeper technical details.
We're preparing a comprehensive write-up covering our learnings, architecture decisions, control algorithms, and suite roll out soon.
17 Oct 2025

4 >
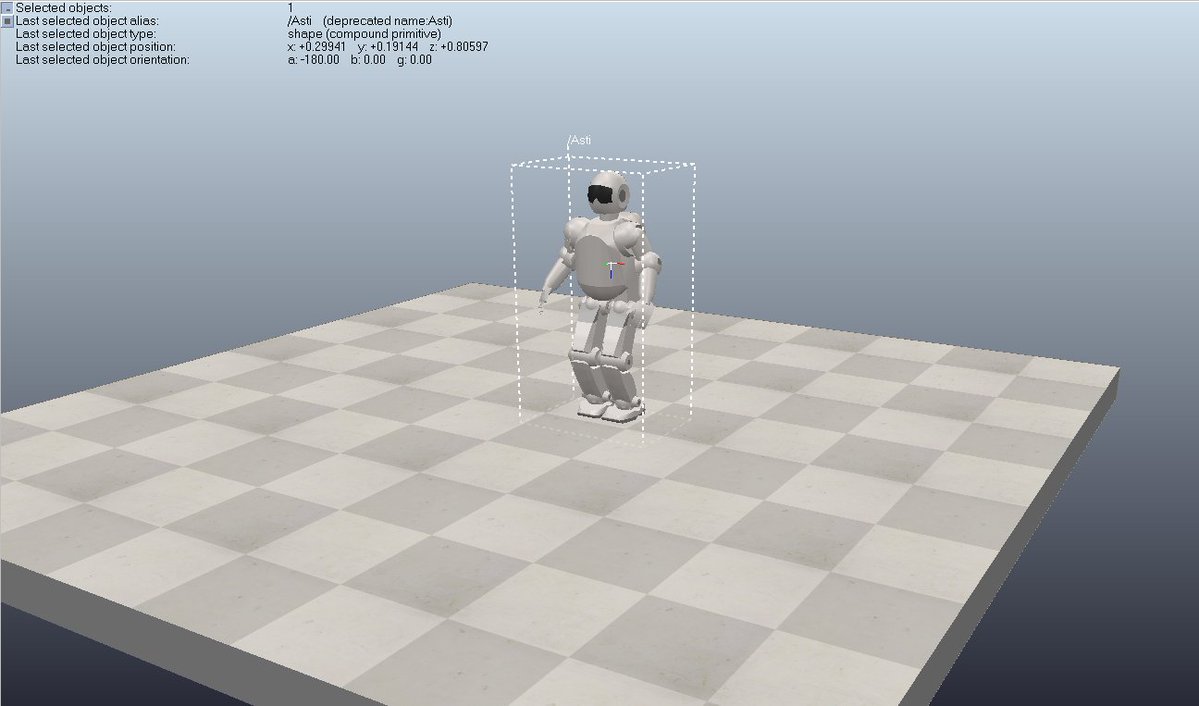
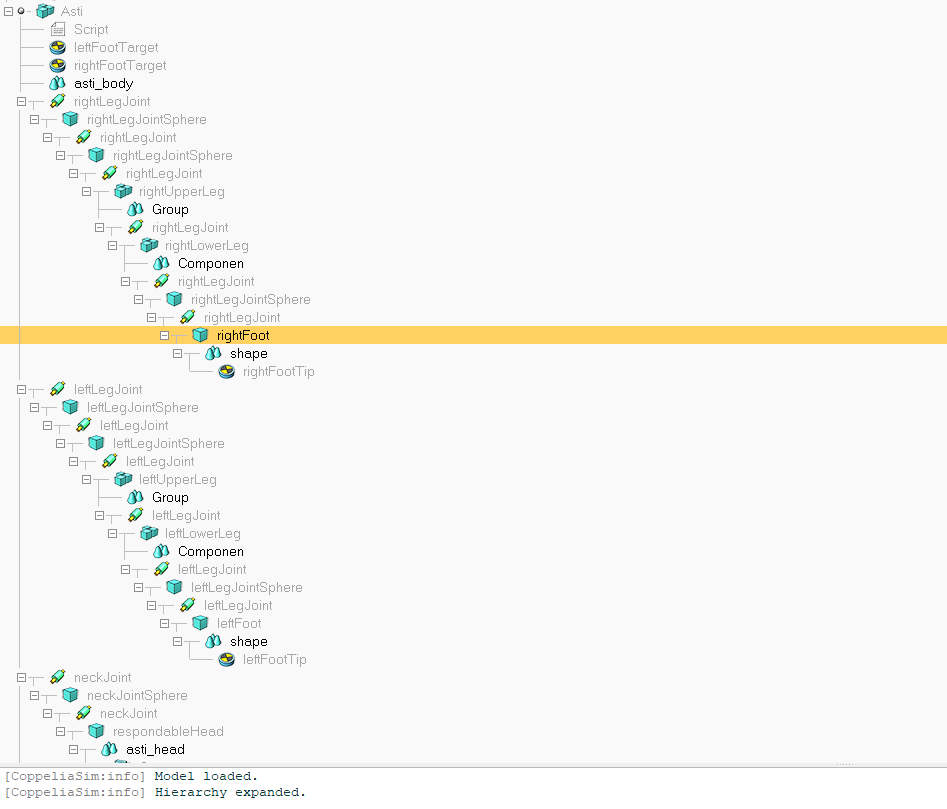
V2 was born!
We then built an entirely new model after ASTI using everything we learnt about the previous model to test the actual architecture of the humanoid robot.
V2 doesn't have a name yet, but we'll open source the build in both URDF and MJCF for whoever wants to test it along with meshes and environment.
Joints intact and framework is frameworking.
2
3
9
74
17 Oct 2025
We've been around for 10 weeks and we've been BUILDING.
Rolling out some of the advancements we've made so that you guys can see!
/Cohora/
3
1
9
122
17 Oct 2025
3 >
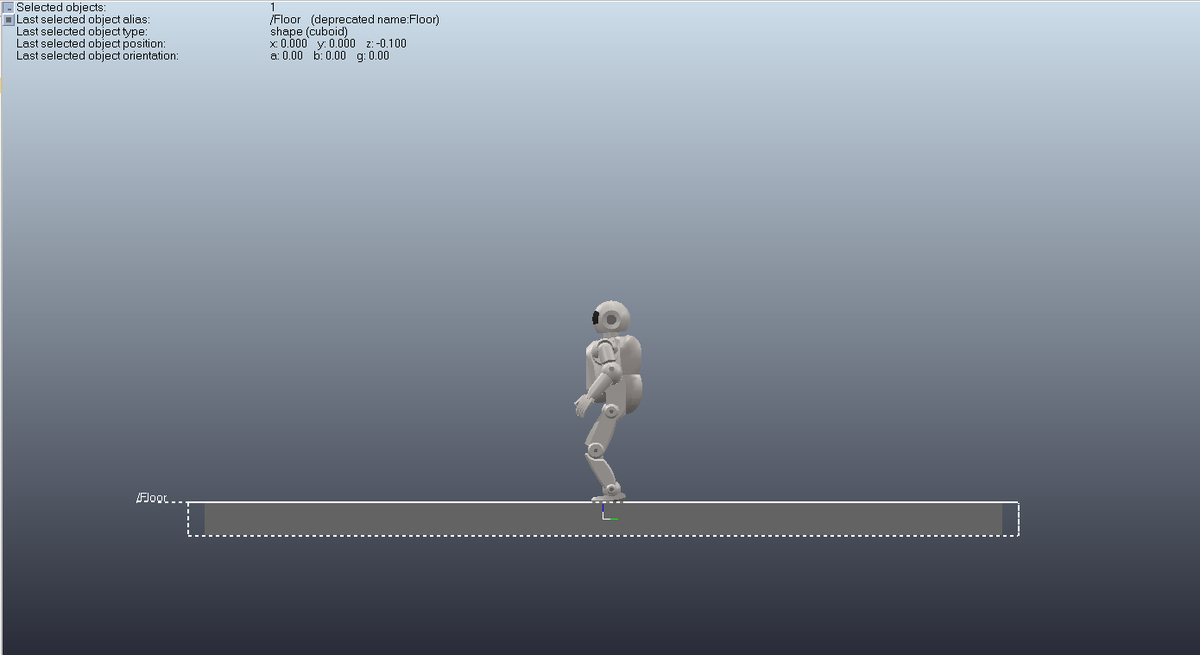
Refined locomotion capabilities through extensive simulation testing. Implemented dynamic walk engine that adapts to slopes up to 15°, handles compliant surfaces by adjusting stance time.
Added push recovery using capture point theory - robot can now handle 50N disturbances in simulation. Discovered edge cases in our state machine causing freeze during rapid gait transitions, restructured FSM logic for smooth switching between behaviors.
1
2
9
60
17 Oct 2025
4 >
V2 was born!
We then built an entirely new model after ASTI using everything we learnt about the previous model to test the actual architecture of the humanoid robot.
V2 doesn't have a name yet, but we'll open source the build in both URDF and MJCF for whoever wants to test it along with meshes and environment.
Joints intact and framework is frameworking.
1
3
9
152
16 Oct 2025
Cohora's vDesktops will still be available and we'll continue adding to them and always finding ways to better them.
They'll be a small part of the entire catalog of different products in our suite.
Robotics incoming.
3
9
87
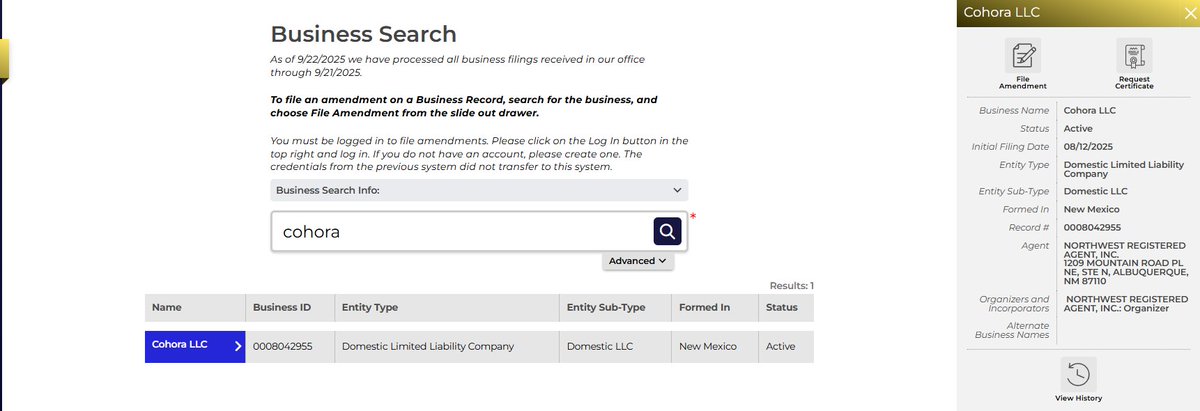
22 Sep 2025
You're welcome to check us out at enterprise.sos.nm.gov/
simply search for Cohora (LLC)
2
8
56