
5 Photos and videos

Avinash U retweeted

India enters the open-weights AI race with its largest models pre-trained from scratch: Sarvam 105B and Sarvam 30B
@SarvamAI's Sarvam 105B and Sarvam 30B score 18 and 12 on the Artificial Analysis Intelligence Index respectively. Announced at the India AI Impact Summit 2026 and open-sourced under Apache 2.0, both are Mixture-of-Experts models trained entirely in India using compute provided under the IndiaAI Mission (@OfficialINDIAai). Both support reasoning and non-reasoning modes.
These are an improvement from Sarvam's previous model, Sarvam M (8 on Intelligence Index, 23.6B parameters), which was based on Mistral Small rather than pre-trained from scratch. Sarvam 105B has 106B total parameters with ~10B active per token and a 128K context window. Sarvam 30B has 32B total parameters with ~2.4B active per token and a 65K context window. Alongside the text models, Sarvam also announced Saaras v3 (Speech to Text) and Bulbul v3 (Text to Speech) with a focus on Indic languages.
Key takeaways in reasoning mode:
➤ Sarvam 105B scores 18 on the Intelligence Index. Among ~100B-class open-weights reasoning models, it trails GLM-4.5-Air (23), INTELLECT-3 (22), Mistral Small 4 (27), and gpt-oss-120B (High, 33). All four peers also activate more parameters per token
➤ Sarvam 30B scores 12 on the Intelligence Index. Among ~30B-class open-weights reasoning models, it trails GLM-4.7-Flash (30), Nemotron Cascade 2 30B A3B (28), Qwen3 30B A3B 2507 (22), and Qwen3 32B (17). Sarvam 30B activates fewer parameters than these peers.
➤ Sarvam 105B's relative strength is in select agentic tasks. Its agentic index of 25 places it ahead of INTELLECT-3 (20) and GLM-4.5-Air (21) despite trailing both on overall intelligence. Its GDPval index of 773 also edges ahead of GLM-4.5-Air (665). Both new models are a large step up from Sarvam M (Reasoning), which scored 8 on the Intelligence Index.
➤ Compared to peers, both models score lower on TerminalBench Hard (Agentic Coding & Terminal Use) and AA-Omniscience. Sarvam 105B scored 1.5% and Sarvam 30B scored 2.3% on TerminalBench Hard, compared to GLM-4.5-Air (20.5%) and INTELLECT-3 (9.1%). The AA-Omniscience Index is -60 for Sarvam 105B and -72 for Sarvam 30B. Both models have high hallucination rates relative to their accuracy, and both attempt to answer far more questions rather than abstaining, which drives the negative scores.
Key model details:
➤ Modality: Text input and output only.
➤ Context window: 128K tokens (Sarvam 105B) and 65K tokens (Sarvam 30B).
➤ Pricing: Currently free on Sarvam's first-party API.
➤ License: Apache 2.0.
➤ Availability: Sarvam's first-party API; weights available on @huggingface and AIKosh.

12
39
383
26,162
Avinash U retweeted

📢 プレスリリース
国産AIエージェント基盤「JAPAN AI Code」、ソフトウェア開発ベンチマークSWE-bench Verifiedにおいて解決率80.2%を達成
〜国内開発のAIエージェント技術として世界最高水準の性能を実証〜
japan-ai.co.jp/news/press/20…
12
23
6,954
Avinash U retweeted

19 Sep 2025
A team of Japanese researchers led by Kojima Tomoki won the Ig Nobel prize for their research paper "Cows painted with zebra-like striping can avoid biting fly attack."
They had a great sense of humor about how to act at the award ceremony.
3
77
435
95,267


My new preprint on RL is out:
Experience Replay with Random Reshuffling
arxiv.org/abs/2503.02269
1
5
20
2,105
Avinash U retweeted

17 Oct 2024
本日の10:00-12:00のIROSのポスターセッションU(7-8で展示)で共著1件(主著:@ummavi)の発表を行います。
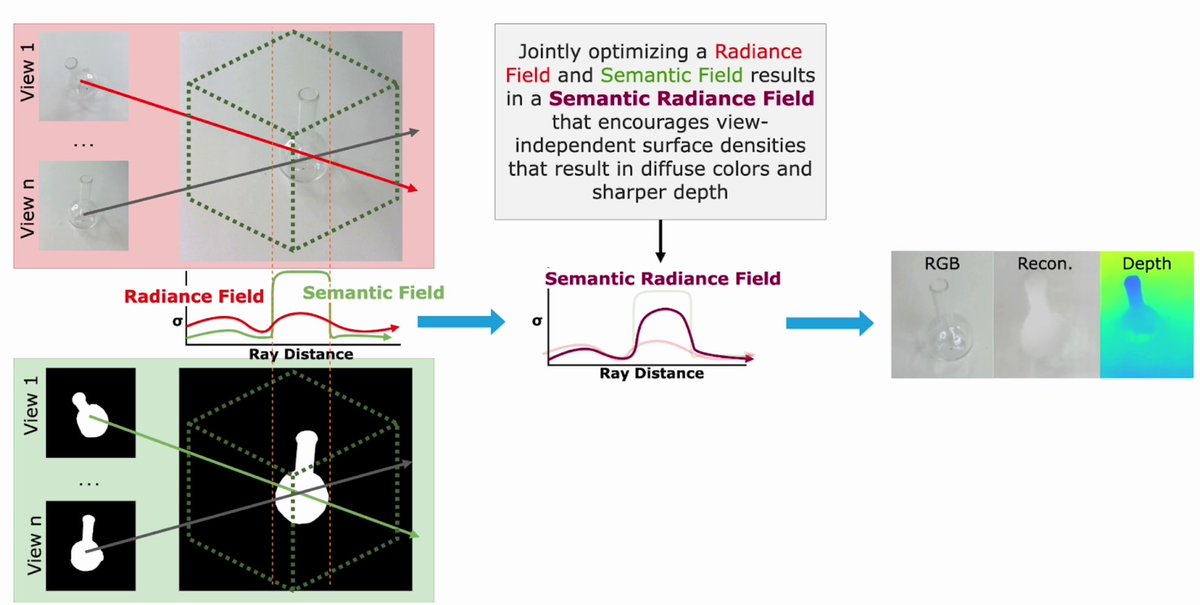
NeRFを用いた透明物体の深度情報の再構成に焦点を当てており、Visual Foundation Modelsでセグメンテーション情報を与えることで、性能を大幅に改善して、ロボット把持を実現しています!
29 Mar 2024

NeRFを用いて透明物体の深度情報を補完する手法の論文を公開しました。通常、透明物体はNeRFでも難しいです。この提案手法では、Visual Foundation Models (VFMs)を使って、透明物体のセグメンテーションの情報を与えることで、解決しています。
arxiv.org/abs/2403.19607
youtube.com/watch?v=S4NCoUq4…
1/n
2
11
1,146

Avinash U retweeted
22 Aug 2024
IROS2024に採択:
ロボットの指先に4軸の受動的適応機構を搭載したグリッパー「FAAF Hand」を開発しました。位置ずれがあっても、正方形・三角形の棒や実験器具の蓋をスムーズに挿入可能。単純な制御でも高精度な作業ができる次世代ロボットハンド。
arxiv.org/abs/2407.21245 youtube.com/watch?v=s3yf2MQ5…
9
38
5,352
Avinash U retweeted

1 Aug 2024
Preferred Networksを退職し、8/1から独立研究者(フリーランス)として活動いたします。様々な産業分野のお仕事を経験しつつ、研究活動を行なっていくのが理想です。業務委託・コンサル等のお問い合わせにつきましては、以下のURLからお気軽にご連絡ください: rezoo.github.io/
22
76
566
148,647
Avinash U retweeted

24 May 2024
So here's a story of, by far, the weirdest bug I've encountered in my CS career.
Along with @maciejwolczyk we've been training a neural network that learns how to play NetHack, an old roguelike game, that looks like in the screenshot. Recenlty, something unexpected happened.

134
1,385
8,342
2,221,187
Avinash U retweeted

8 May 2024
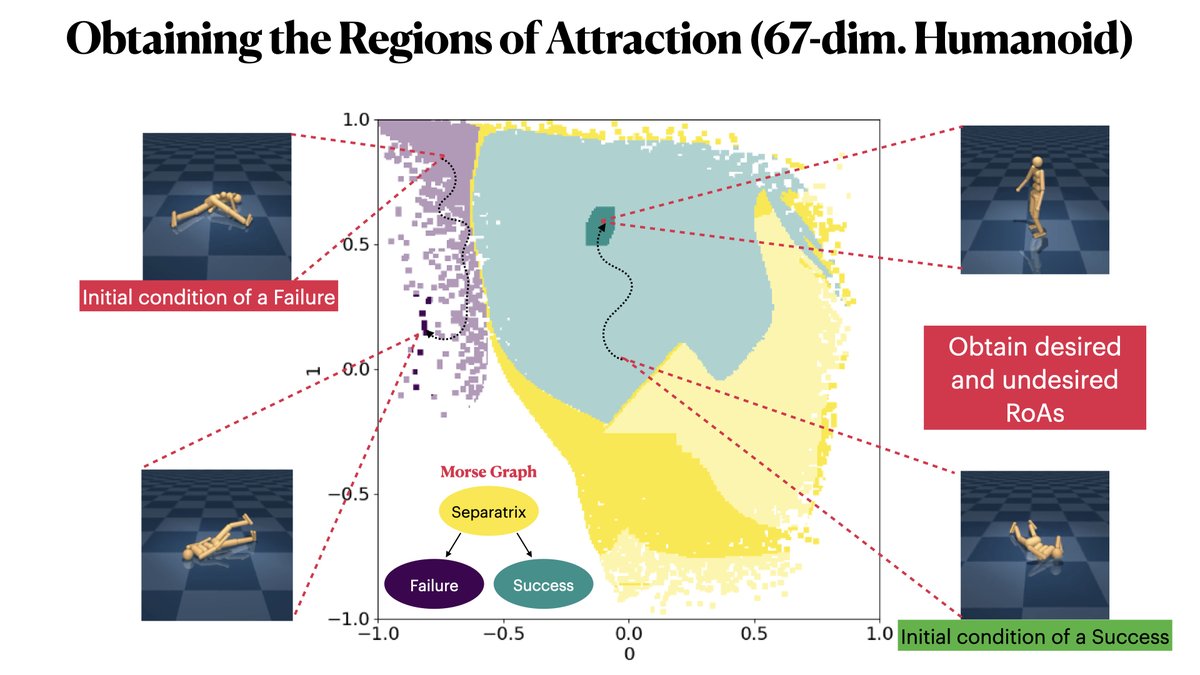
Can you know when your robot policy works without running it?
"MORALS: Analysis of High-Dimensional Robot Controllers via Topological Tools in a Latent Space" (nominated for Best Automation Paper @ieee_ras_icra), does just that! Here is all you need to know 📷 (1/n)
1
6
23
3,298
Avinash U retweeted

29 Mar 2024
PFN's Robotics Research Team is looking for a Japan-based part-time engineer/researcher for R&D in object manipulation tasks using a robotic arm with several sensors.
open.talentio.com/r/1/c/pref…
1
1,631
Avinash U retweeted
29 Mar 2024
NeRFを用いて透明物体の深度情報を補完する手法の論文を公開しました。通常、透明物体はNeRFでも難しいです。この提案手法では、Visual Foundation Models (VFMs)を使って、透明物体のセグメンテーションの情報を与えることで、解決しています。
arxiv.org/abs/2403.19607
youtube.com/watch?v=S4NCoUq4…
1/n
1
3
24
3,839

Introducing Segmentation-AIDed NeRF (SAID-NeRF) for depth completion of transparent objects. NeRFs can capture specular surface effects of transparent objs but struggle to recover underlying geometry. We exploit segmentation VFMs like SAM to overcome this
arxiv.org/abs/2403.19607
1
6
7
1,855
We evaluate on the ClearPose dataset & perform robotic grasping expts. for 10 diverse objects and find remarkable performance across the board, even when placed on challenging unpatterned, glossy white tables w/ harsh lights
Video: youtu.be/S4NCoUq4bmE
53
Avinash U retweeted

21 Mar 2024
🆕最新トレーラー公開🆕
『#OmegaCrafter / オメガクラフター』
早期アクセス版リリース告知トレーラーが完成️🎉
⏰リリース時刻:3月29日(金) 正午
🛍️販売価格:2,800円(税込)
【セール情報】リリース後1週間は10%OFF(2,520円)🔥
ウィッシュリスト登録はこちら👇
store.steampowered.com/app/2…
4
234
489
324,865
Avinash U retweeted

27 Feb 2024
PFN では、実写映像と仮想空間とをリアルタイムに合成して映像作品を制作する技術「バーチャルプロダクション」に 3D AI を導入する技術開発を進めています。こちらのような様々なロケーションでのリアリティの高い映像を、スタジオから出ることなく撮影可能にすることを目指しています
2
74
226
83,026
Avinash U retweeted

1 Jan 2024
@elonmusk Dear Elon
Remove restrictions for this account.

X(旧Twitter)のAPI使用回数が上限に達したため、 @UN_NERV および @EN_NERV で自動ツイートができなくなっています。NERV防災アプリをお使いいただけましたら幸いです。
ダウンロード→ nerv.app/download.html
3
4
476