
Joined September 2018
- Tweets 321
- Following 2
- Followers 4,232
- Likes 1,210
83 Photos and videos












Pinned Tweet

3 Sep 2025
🚀After Years of building battle-tested autonomy for drones, we’re excited to make JETCORE-FC publicly available ! Our flagship compute module along with Flight control carrier board designed for real-time perception, autonomy, and edge AI workloads.
Built around NVIDIA Jetson, JETCORE-FC powers our own drones that fly without GPS, without radio, and without compromise. Now, we’re bringing the same power to the hands of developers, researchers, and system integrators.
🔧 Plug-and-play with:
High-speed interfaces for camera, LIDAR, and IMU
Ruggedized I/O and low-latency networking
Full support for ROS, PX4, and custom Linux pipelines
Whether you’re building next-gen robotics, defense-grade UGVs, or intelligent drones, JETCORE-FC gives you the reliability and performance we trust in the field.
🛒 Get yours now → store.vecros.com/products/je…
#Vecros #JETCORE #EdgeAI #NVIDIAJetson #Robotics #Autonomy #Drones #AI #GPSTech #DroneComputing #SpatialAI
@nvidia @NVIDIARobotics
@FIR31415 @besta_tweets @RobuinN
3
24
104
15,801

we built a drone that flies without GPS, without a pilot, without any signal
tested it in darkness, in GPS-denied zones.
it just… works.
so here's an open challenge: name an environment you think it can't handle.
we'll test the best suggestion on camera.
26
56
383
9,490
we are an endangered species you and I ..
we are lovers of flight …
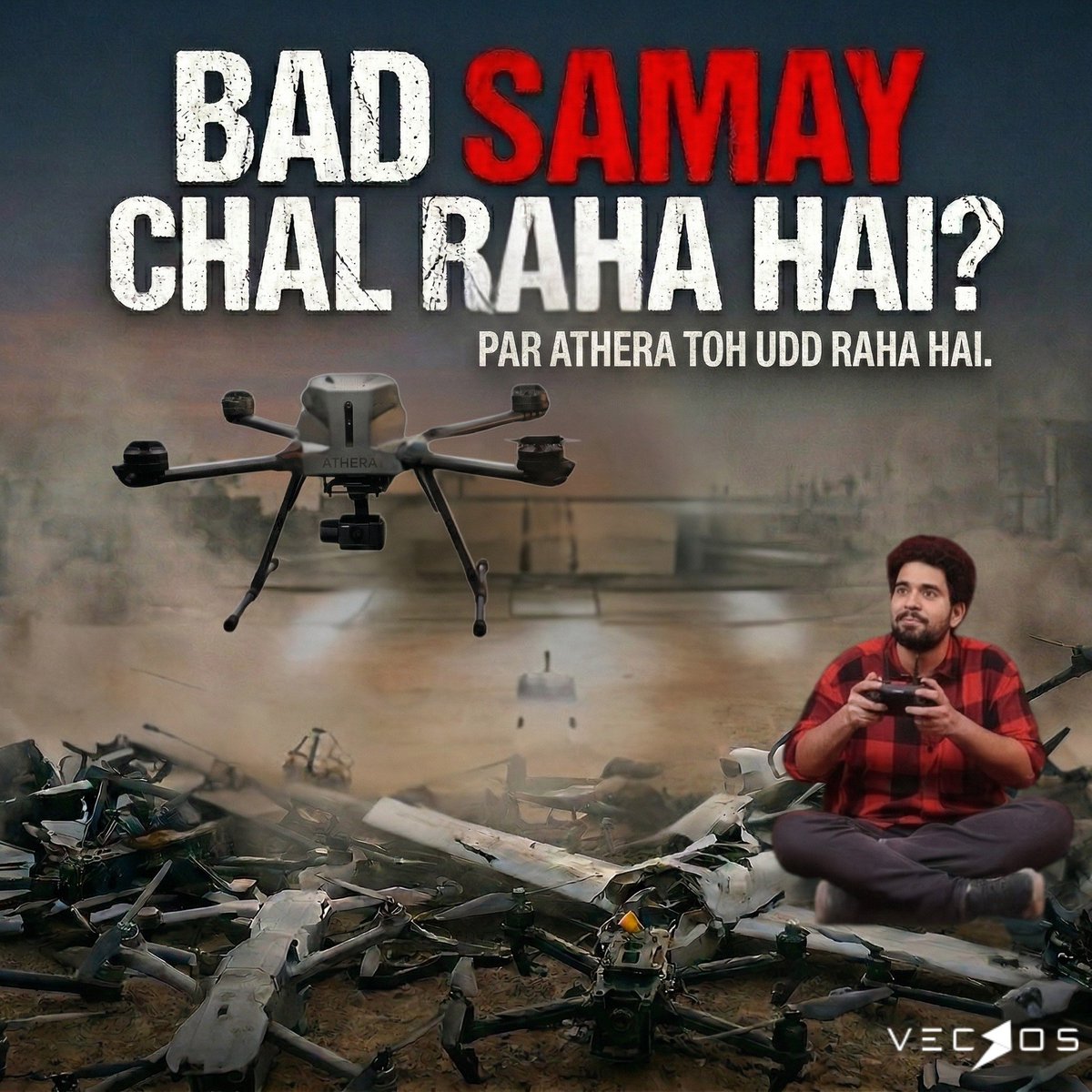
checkout India’s First Truly Spatial AI (AI which understands the space) drone
‘ATHERA’ truly rugged. built for high performance mission. no compromise on materials, intelligence and reliability.
14
31
220
19,006

Jun 6
We are taking orders. DMs are open.

BMS. Battery Management System (4S)
for autonomous drones that are built for real applications!
designed & built right here in India 🇮🇳✨
no compromises - just hardcore engineering.
sovereign tech for the win.


1
3
53
2,187
wow i didn’t expect this much love for this tweet. but its high time that sovereign tech needs to rise in India.
JetCore 🫡💯❤️🇮🇳
Our in-house flight computer for autonomous drones! designed & built right here in India 🇮🇳✨
no compromises - just hardcore engineering from the @VecrosTech
Bharat is building. #MakeInIndia #DroneTech #Vecros
@PiyushGoyal @amitabhk87 @DefenceMinIndia @nvidia


8
65
718
23,408

May 29
Vecros is on the Forbes 30 Under 30 Asia 2026 list, Industry, Manufacturing & Energy.
Grateful. Back to work.
Read our Forbes profile → lnkd.in/g8DitbKN
#ForbesUnder30 #ForbesU30Asia
2
3
17
854
May 28
Super proud of our founders.
Always rocking 🔥🔥🔥🛐
May 28

Thank you @Forbes for this.
We're just getting started.
#ForbesUnder30 #ForbesU30Asia
@ForbesAsia @ForbesUnder30
forbes.com/profile/vecros/?l…

1
18
1,243
all in-house designed & developed electronics for advancing drone tech by VECROS
#madeinindia

14
14
263
5,609

someone has to built it. we took the challenge. we are shipping all products activity
May 19

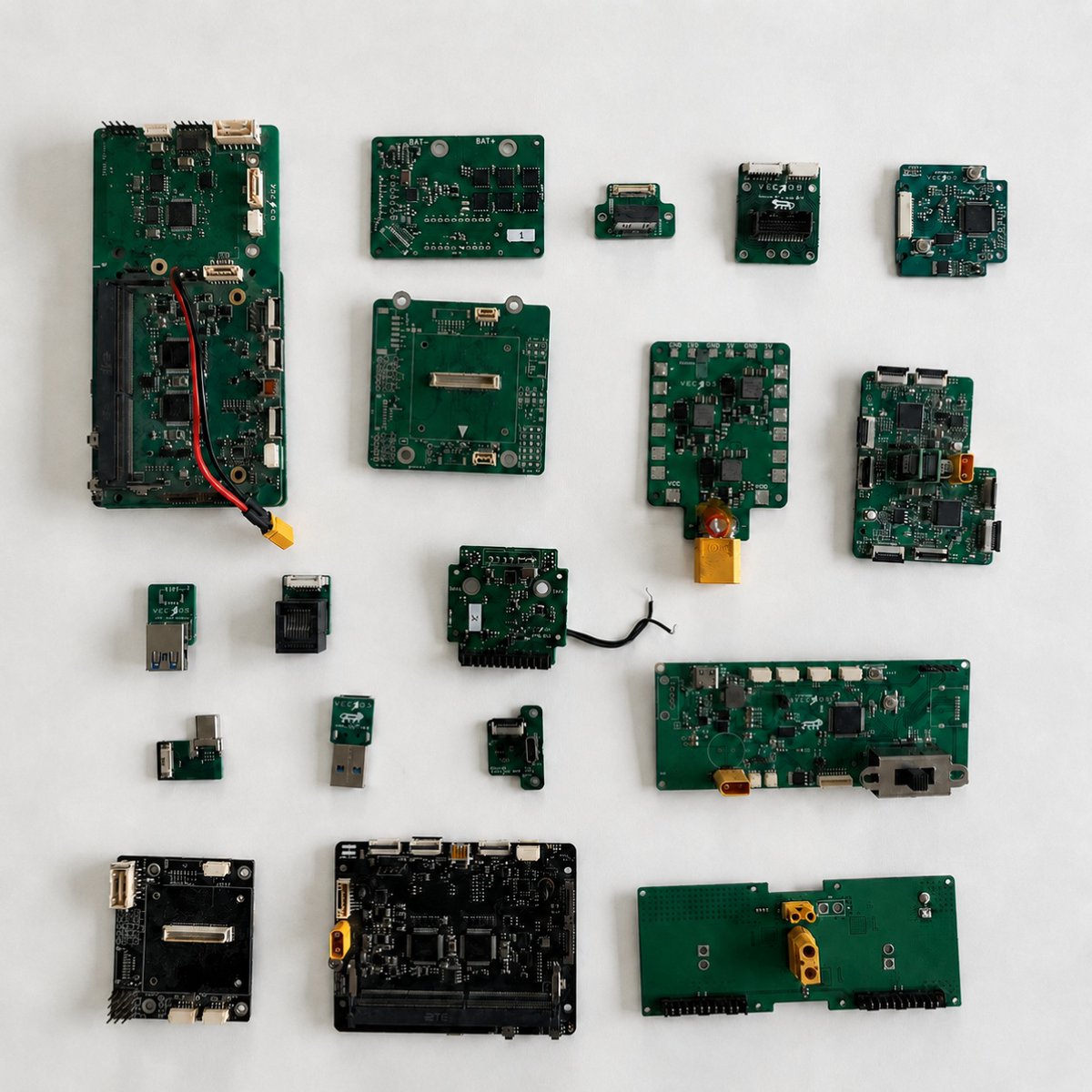
every board on this table was built in-house.
hardware is unforgiving. we built it anyway.
2
2
61
1,720
May 21
2
28
1,840
May 19
every board on this table was built in-house.
hardware is unforgiving. we built it anyway.
1
7
58
2,748
May 18
3
3
47
4,212
May 11
day 121018 of asking the drone nicely
there's a reason behind this number. figure it out 👀
#Vecros #DroneStartup #DroneTech #MadeInIndia #StartupLife
1
1
23
1,027
May 9
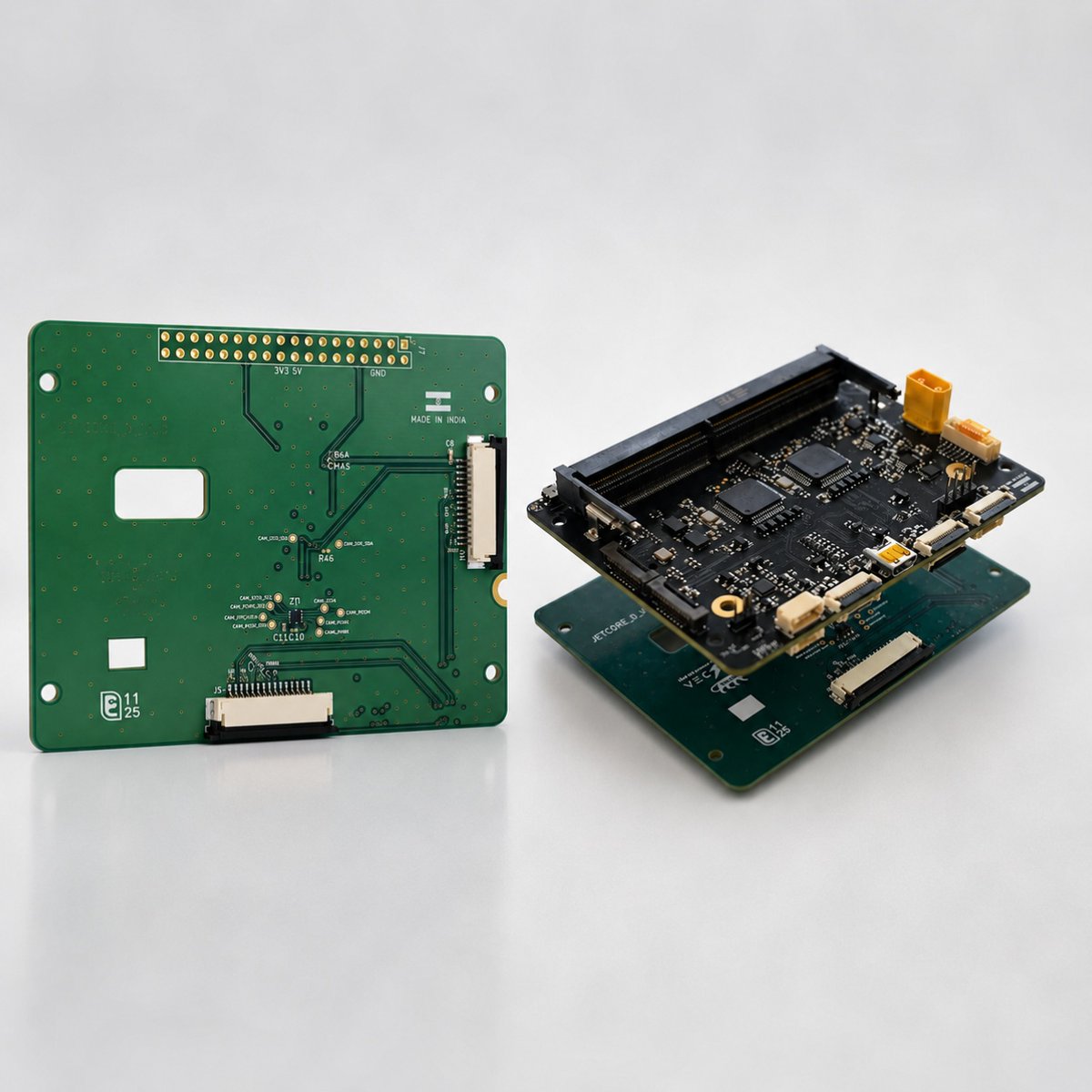
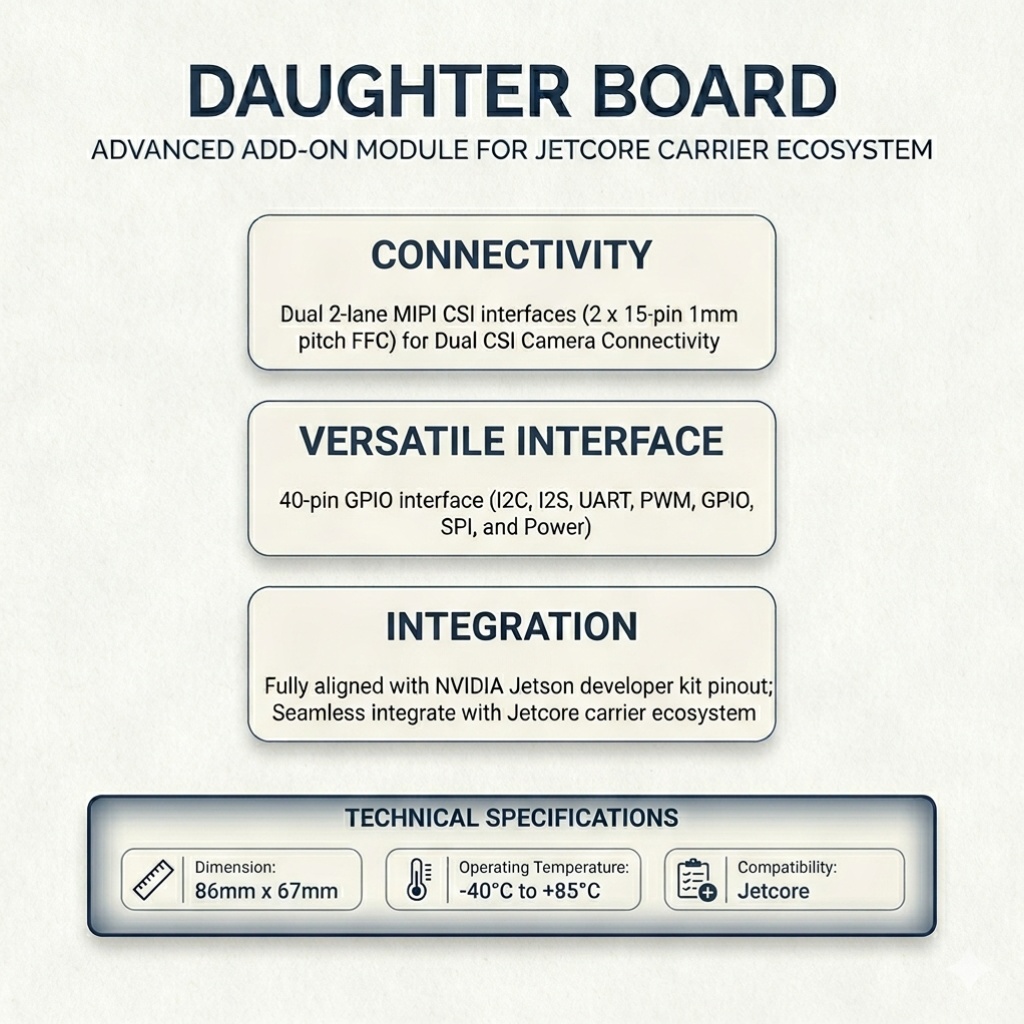
7 simultaneous camera inputs. One compact board.
Plug Daughter Board into Jetcore, wider FOV, better depth perception, richer AI data. No added complexity.
This is what your build's been missing.
DM us or comment below. contact@vecros.com
1
15
546
“roads were built for eyes” - but human vision also fails constantly! glare, fog, rain, fatigue. if we are replacing it with autonomous systems, why not sensor fusion rather than insisting on “sensor purity” cameras neural nets still have to solve depth and lighting, where lidar just measures it. cost was agreed high, but its coming down with solid state lidars.
you proved with Dragon because stakes were too high. doesn’t having lidar increase capability at highway speeds especially at night?! autonomous systems isn’t about mimicking humans, but exceeding them, imo.

Don’t be silly. I oversaw the SpaceX engineering team that built the Dragon LiDARs used to dock with @Space_Station!
They are simply the wrong solution for a complex terrestrial road system that was designed for biological neural nets and eyes.
Therefore the right, imo only, general solution is artificial neural nets and cameras.
1
1
9
567
May 5
We posted the role. One applicant. Zero complaints. Never late.
Guess who got hired? 👇
#Vecros #MadeInIndia #Dronetech #EdgeAI #startupindia #robotics #hiring
2
12
648